一种基于交叉口穿越风险度的自动驾驶车辆安全通行优化方法
本发明涉及交叉口自动驾驶与路径优化领域,具体来说,涉及一种基于交叉口穿越风险度的自动驾驶车辆安全通行优化方法。
背景技术:
1、在我国积极推进智慧交通领域的发展背景下,自动驾驶技术呈现迅猛的进步态势,这也催生了针对其新兴规划策略的需求。通过科学的交通规划策略,我们能够优化车辆之间的通信和协作、合理分配道路资源、避免交通拥堵、提高道路通行效率、增强交通安全性能,推动自动驾驶技术的不断进步和完善。
2、交叉口作为道路的重要节点受到大量学者的关注,现有针对交叉口自动驾驶车辆通行的研究中,大多数以提升车辆通行效率、提高交叉口通行能力、预防车辆碰撞等为目标。此外,现有研究已经证实交叉口车辆可以利用放行方向上的车辆间隙穿行,从而提高通行效率。但目前的研究尚未提出一种以提升交叉口安全、降低车辆交互风险为主要目标的优化方法。因此,本发明考虑以完全自动驾驶环境下车辆可以利用间隙穿行为前提条件,基于文中提出的穿越风险度指标(crossing risk degree,以下简记为crd)来确定完全自动驾驶环境下交叉口车辆的穿行次序。通过比较crd值的大小合理制定进口道不同转向车队的放行顺序,以保证交叉口车辆高效穿行的同时,使车辆间的冲突风险降低,事故损失最小化,达到在完全自动驾驶环境下提高交叉口安全性与高效性的目的。
技术实现思路
1、本发明的目的是针对当前自动驾驶在交叉口安全通行策略研究中的不足,提供一种基于穿越风险度的交叉口自动驾驶车辆穿行控制方法。该方法适用于任何形式的平面交叉口,包括十字交叉、x形交叉、t形交叉等,而且交叉口无需进行任何形式的控制,如信号控制或标志控制。因此,本发明对于提高任意类型交叉口的通行效率,降低车辆冲突严重程度,提高交通安全均具有重要的意义。
2、本发明的目的是通过以下技术方案实现的:一种基于交叉口穿越风险度的自动驾驶车辆安全通行优化方法,其特征是,包括以下步骤:
3、1)首先,定义研究对象。本文将交叉口进口道上的自动驾驶车辆选取为研究对象。在不同的进口道上,距离停止线最近的车辆所在的方向被定义为优先放行的方向,而其他进口道的方向则统称为冲突方向。本发明引入车头时距的概念来定义车队,车头时距表示前后两辆车通过同一断面的时间差,一组车流中任意两车车头时距不大于某上限值则可将此组车流视为一个车队,文中将此车头时距上限值定义为ht0。因此,本文将优先放行车道上自首车起,车头时距不大于ht0的车辆组成的车队称为优先车队,而冲突方向车道上自首车起,车头时距不大于ht0的车辆组成的车队则称为冲突车队。冲突车队中的车辆可以利用优先车队中的车辆间隙穿插通行以提高交叉口通行效率。
4、2)下一步,计算车辆碰撞的能量损失。若两车发生冲突,其冲突严重程度与其冲突形态密切相关,具体来说,两辆小汽车发生碰撞,其碰撞角度很大程度决定了碰撞事故的严重程度。
5、假设两辆质量分别为m1、m2的小汽车发生碰撞,碰撞前两车速度分别为v1、v2,两者碰撞角度为θ,碰撞过程视为非弹性碰撞,碰撞后两车组成的整体质量为m3,速度为v3,系统初始动能与碰撞后系统末动能的差值定义为能量损失δe。由动量守恒定律可求解v3:
6、
7、
8、由动能守恒定理可求解能量损失δe:
9、
10、将式(2)代入上式,可解得能量损失δe与碰撞角度θ之间的关系:
11、
12、车辆碰撞角度θ∈[0,π],由式(4)可知:碰撞角度越大,能量损失越大,事故越严重。
13、3)其次,计算交叉口车队发生冲突的概率。本文运用车头时距的分布求解交叉口不同进口道的车队发生冲突的概率。车队中车头时距的分布表示车队内部车辆之间通过同一断面所需时间的变化情况,它反映了车辆之间的间隔情况。为了描述不同进口道车队的车头时距分布规律,交叉口的云端控制中心可以根据实际情况选择合适的分布函数来拟合车头时距的分布。假设a车为优先车队头车,b车为某冲突车队头车,将a车从停止线至冲突点的时间定义为t1,b车从停止线至冲突点的时间定义为t2,两车恰好不发生冲突的时间间隔称为临界可接受间隙,定义为δt。
14、则a车与b车不发生冲突的条件为:
15、t1+δt≥t2 (5)
16、假设优先车队车头时距分布的概率密度表示为f(ta),此冲突车队车头时距分布的概率密度表示为f(tb),则a车、b车发生冲突的概率可表示为:
17、
18、由式(6)可得交叉口a车所在车队与b车所在车队的机动车单车冲突概率为p,用pn表示这两个车队之间的总冲突概率,则有:
19、pn=p1+(1-p1)p2+(1-p1)(1-p2)p3+…+(1-p1)(1-p2)…(1-pn-1)pn (7)
20、即由n辆车组成的冲突车队,其与优先车队发生冲突的概率为pn。
21、4)最后,基于穿越风险度制定交叉口冲突车队的穿行次序。为了描述冲突车队在交叉口内部穿行的危险程度,本文提出了穿越风险度指标,并简记为crd,crd定义为优先车队中的车辆和冲突车队中的车辆发生碰撞产生的能量损失与优先车队和冲突车队的冲突概率的乘积。由式(4)和式(7)可得:
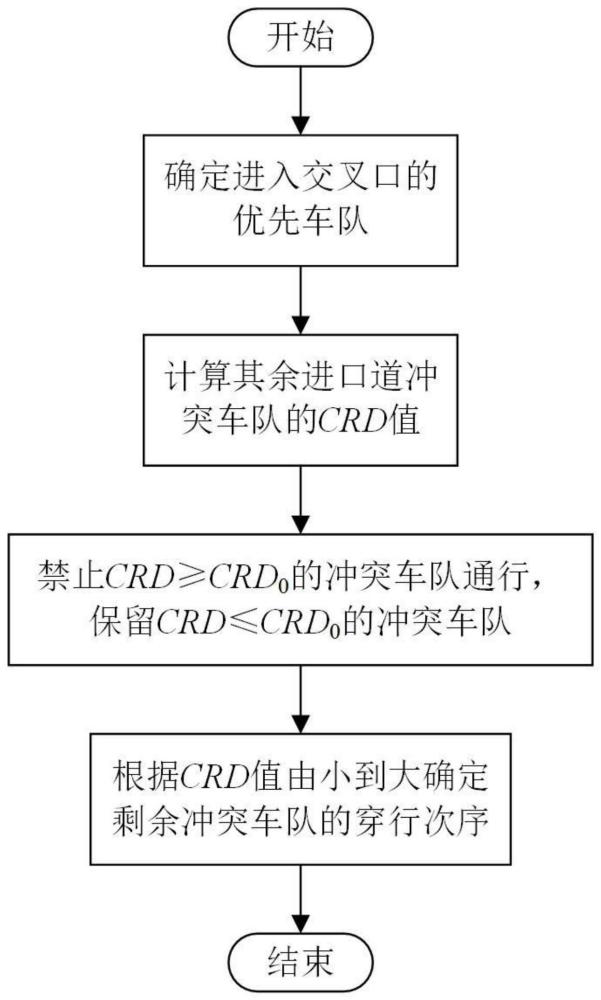
22、crd=δe·pn (8)
23、本发明利用穿越风险度指标crd来确定完全自动驾驶环境下交叉口车辆利用间隙穿行时的穿行次序。通过计算不同冲突车队的crd值,量化放行不同冲突车队时的危险程度,crd值越大,则冲突车队穿行时越危险,反之,则更加安全。因此,为了综合考虑交叉口的通行效率和安全程度,crd值应不大于某上限值,本文将此上限值定义为crd0。crd值不大于上限值crd0的冲突车队可考虑利用优先车队中的车辆间隙穿行通过交叉口,并且应根据crd值由小到大依次放行,即crd值最小的冲突车队优先穿行,依次往后。通过评估不同冲突车队的crd值并提供相应的穿行次序,可以为完全自动驾驶环境下交叉口的车辆穿行策略提供更安全可靠的理论基础。
24、本发明中的自动驾驶车辆均为l5级完全自动驾驶,车辆通过基础数据感知模块感知外界环境,通过信息交互共享模块完成信息交互,包括车与车通信等,通过决策控制应用模块实现车辆与环境的相互协调。车辆可利用车载单元获取车体质量以及行车速度等信息,云端控制中心可以预测不同进口道两辆车的冲突形态,得到车辆的碰撞角度,由以上信息可以计算两辆车碰撞产生的能量损失,并以此反应碰撞的严重程度。路侧单元可以实时感知道路运行状况,云端控制中心可以根据感知结果选择合适的车头时距分布来描述交叉口进口道车辆到达的随机特性,结合路侧单元及高精度地图可以计算任意车辆从停止线至冲突点的时间差,由以上信息可以计算冲突车队与优先车队发生冲突的概率。能量损失与冲突概率的乘积即为本文提出的穿越风险度指标crd,根据crd值由小到大确定冲突车队的穿行次序,超过上限值crd0的冲突车队禁止放行,由此利用可穿越间隙行车能够在一定程度上提高交叉口的安全性,并有效提高车辆的通行效率。
25、本发明具有以下有益效果:
26、本发明提出了穿越风险度指标crd,以此评价完全自动驾驶环境下交叉口车辆利用可穿越间隙行车的风险程度,填补了对于自动驾驶车辆穿行风险评估的空白。
27、本发明在实时检测数据的基础上,通过云端系统计算crd值,并基于crd值制定完全自动驾驶环境下交叉口车辆的穿行策略。当进入交叉口的优先车队确定,其余进口道上crd值小于crd0的冲突车队可利用优先车队中的车辆间隙穿插通行,并按照crd值由小到大的顺序确定冲突车队的穿行次序。本发明对于提高交叉口运行效率、提高交通安全均具有重要的意义。随着自动驾驶、车路协同以及智能交通技术的发展,本发明的提出具有较好的市场前景。
- 还没有人留言评论。精彩留言会获得点赞!