一种航空器碰撞风险评价方法及系统
本发明属于保障飞行安全的措施和途径,具体涉及一种航空器碰撞风险评价方法及系统。
背景技术:
1、目前,针对精密进近航段障碍物进行评估的主要依据有三个方面。首先是根据《国际民用航空公约附件14—机场》(annex 14)提出的障碍物限制面和基本ils面。其主要针对机场周边障碍物对机场净空的影响,确保机场的安全运行。其次是根据《空中航行服务程序—航空器运行》第ⅱ卷——目视和仪表飞行程序设计(pans-ops,doc8168号文件)设定的障碍物评价面(obstacle assessment surface,oas)。该文件规定oas的目的是确保沿精密进近航迹进近的航空器与周围障碍物发生碰撞的风险低于1x10-7。最后是国际民航组织文件doc9274中提出的碰撞风险模型(collision risk model,crm),其作为使用oas准则的备选方法,或在oas面之下的障碍物密度过大时使用。
2、2020年,mori等提出了一种评估航空器与地面障碍物碰撞风险的方法,通过仿真生成了106组飞行轨迹来计算风险值,并描述了障碍物遮蔽角特性。然而,该方法未基于实际飞行数据来描述航空器位置误差分布规律,并且同一位置因概率不同存在不同的遮蔽角,因此无法应用于实际运行中的碰撞风险评估。
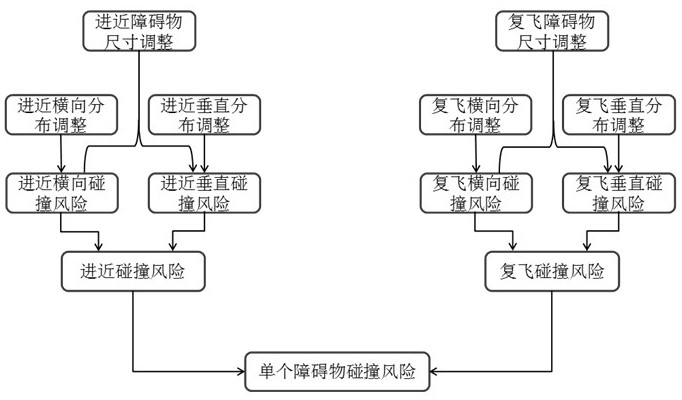
3、2019年,李娜等利用统计建模的方法,基于航空器ⅰ类精密进近航迹偏差,建立了航空器碰撞风险模型,并提出了以椭圆评价面来替代现行的oas面。然而,在之前的研究中,并没有考虑到多个障碍物碰撞风险累加的问题,当障碍物数量过多时,可能会导致风险值显著增加。除此之外,这些研究只单独考虑了进近过程中的碰撞风险概率或复飞过程中的碰撞风险概率,并未将两者综合起来考虑。而在进近过程和复飞过程中都存在横向分布与垂直分布,之前的研究仅针对障碍物的垂直分布对航空器的影响进行了论述,并没有把横向分布和垂直分布综合考虑,这都将导致对航空器的碰撞风险评价出现误差。
技术实现思路
1、本发明旨在解决现有技术的不足,探索并建立了航空器碰撞风险模型,分析了航空器与障碍物之间的碰撞风险,为航空器避障提供了一种理论和可行的方法参考评估和减少在航空器运行中的碰撞风险。
2、为实现上述目的,本发明提供了如下方案:一种航空器碰撞风险评价方法,包括以下步骤:
3、s1、构建标准笛卡尔坐标系统,基于所述标准笛卡尔坐标系统确定障碍物和航空器的坐标;所述标准笛卡尔坐标系统以跑道入口为原点,x轴与跑道中线平齐并向外延伸,y轴从跑道入口向外延伸,z轴与跑道入口的x轴、y轴垂直;
4、s2、确定障碍区;构建crm模型,基于所述crm模型计算障碍物与航空器在所述障碍区的碰撞风险概率;
5、s3、基于机场与航空器参数调整分布,并计算垂直概率和横向概率,并基于所述垂直概率和所述横向概率得到单个障碍物风险;
6、s4、基于所述单个障碍物风险与设定阈值比较大小,基于比较结果,进行碰撞风险评估,得到评估结果。
7、进一步优选地,所述crm模型包括:与单个障碍物相关的风险模型、与给定障碍物相关的风险模型以及每次进近预测风险模型。
8、进一步优选地,所述与单个障碍物相关的风险模型包括:
9、,
10、式中, p( o k)表示与障碍物 k发生碰撞的事件概率; z k表示为障碍物相对于坐标原点的高度; y k1和 y k2为面状障碍物两端至跑道中线或其延长线的距离; g x( y)和 h x( z)分别为描述航空器在 x范围内 y平面位移和 x范围 z平面位移的概率密度函数。
11、进一步优选地,所述与给定障碍物相关的风险模型包括:
12、,
13、式中, p( c)表示进近/复飞过程中发生碰撞事件的概率;表示进近/复飞过程中未与障碍物 o n*发生碰撞事件的概率; p( o k*)表示修改后的与障碍物k碰撞的概率;n表示障碍物总数量。
14、进一步优选地,所述每次进近预测风险模型包括:
15、,
16、式中, r表示航空器在指定进近时的风险概率; r k*表示与单个障碍物k的碰撞概率; α k*为修正复飞系数; p( o k*)表示修改后的与障碍物k碰撞的概率;n表示障碍物总数量。
17、本发明还提供一种航空器碰撞风险评价系统,所述评价系统用于应用上述评价方法,包括:坐标构建模块、计算模块、调整模块以及评估模块;
18、所述坐标构建模块用于构建标准笛卡尔坐标系统,基于所述标准笛卡尔坐标系统确定障碍物和航空器的坐标;所述标准笛卡尔坐标系统以跑道入口为原点,x轴与跑道中线平齐并向外延伸,y轴从跑道入口向外延伸,z轴与跑道入口的x轴、y轴垂直;
19、所述计算模块用于确定障碍区;构建crm模型,基于所述crm模型计算障碍物与航空器在所述障碍区的碰撞风险概率;
20、所述调整模块用于基于机场与航空器参数调整分布,并计算垂直概率和横向概率,并基于所述垂直概率和所述横向概率得到单个障碍物风险;
21、所述评估模块用于基于所述单个障碍物风险与设定阈值比较大小,基于比较结果,进行碰撞风险评估,得到评估结果。
22、进一步优选地,所述crm模型包括:与单个障碍物相关的风险模型、与给定障碍物相关的风险模型以及每次进近预测风险模型。
23、进一步优选地,所述与单个障碍物相关的风险模型包括:
24、,
25、式中, p( o k)表示与障碍物 k发生碰撞的事件概率; z k表示为障碍物相对于坐标原点的高度; y k1和 y k2为面状障碍物两端至跑道中线或其延长线的距离; g x( y)和 h x( z)分别为描述航空器在 x范围内 y平面位移和 x范围 z平面位移的概率密度函数。
26、进一步优选地,所述与给定障碍物相关的风险模型包括:
27、,
28、式中, p( c)表示进近/复飞过程中发生碰撞事件的概率;表示进近/复飞过程中未与障碍物 o n*发生碰撞事件的概率; p( o k*)表示修改后的与障碍物k碰撞的概率;n表示障碍物总数量。
29、进一步优选地,所述每次进近预测风险模型包括:
30、,
31、式中, r表示航空器在指定进近时的风险概率; r k*表示与单个障碍物k的碰撞概率; α k*为修正复飞系数; p( o k*)表示修改后的与障碍物k碰撞的概率;n表示障碍物总数量。
32、与现有技术相比,本发明的有益效果为:
33、本发明基于碰撞风险模型,研究了航空器的避障问题。通过crm模型的总体概念、安全目标水平和数学模型,构建风险碰撞模型,从而计算得到与单个障碍物、给定障碍物和每次进近相关的风险。并以某机场为例,通过具体的计算实例,量化了碰撞风险,并提供了实证数据支持。结果表明,基于风险碰撞模型的航空器避障策略可以有效减少碰撞风险,提高航空安全性。本发明为航空器避障提供了一种理论和方法参考,对航空安全管理具有重要的意义。
- 还没有人留言评论。精彩留言会获得点赞!