一种城市内非机动车管理方法、装置、电子设备及介质与流程
本技术涉及城市管理的领域,尤其是涉及一种城市内非机动车管理方法、装置、电子设备及介质。
背景技术:
1、随着城市的发展,城市内非机动车的数量越来越多,在商场、写字楼等公共区域非机动车乱停乱放的现象日益严重,从而影响市容市貌。目前通常由城市管理人员在城市内定期巡查以对乱停乱放现象严重的位置进行管理,但通过该方式进行管理时往往乱停乱放现象已经持续较长时间,导致非机动车管理时效性较差。因此,如何更及时对乱停乱放的非机动车停放区域进行管理成为一个问题。
技术实现思路
1、为了更及时对乱停乱放的非机动车停放区域进行管理,本技术提供一种城市内非机动车管理方法、装置、电子设备及介质。
2、第一方面,本技术提供一种城市内非机动车管理方法,采用如下的技术方案:
3、一种城市内非机动车管理方法,包括:
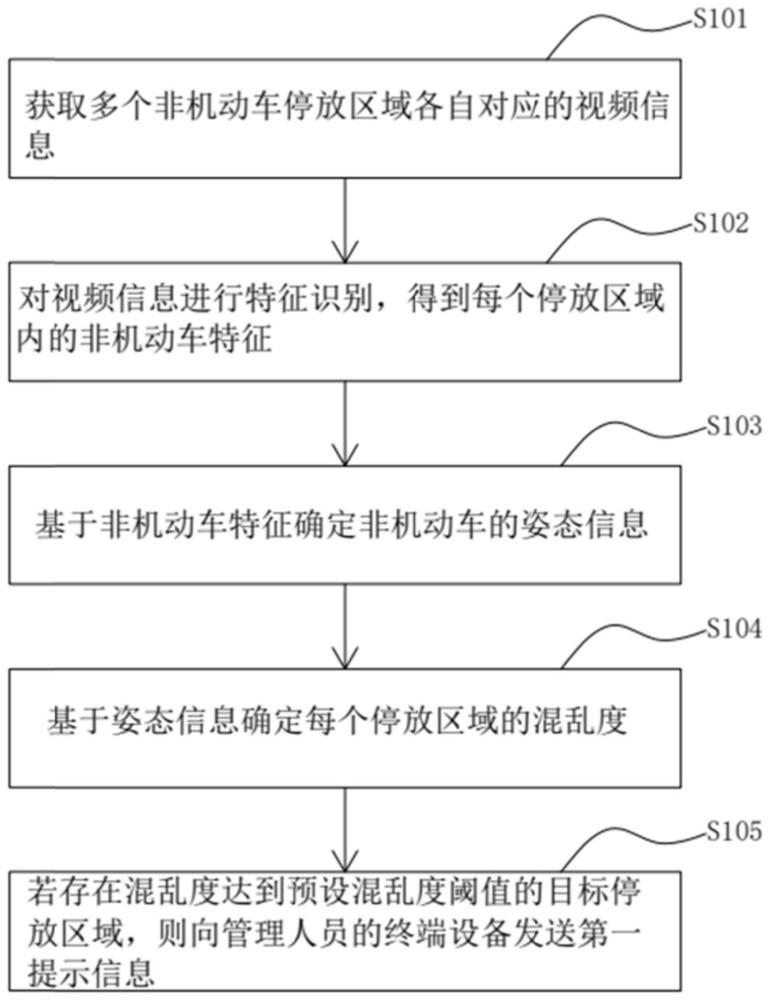
4、获取多个非机动车停放区域各自对应的视频信息;
5、对所述视频信息进行特征识别,得到每个停放区域内的非机动车特征;
6、基于所述非机动车特征确定非机动车的姿态信息;
7、基于所述姿态信息确定每个停放区域的混乱度;
8、若存在混乱度达到预设混乱度阈值的目标停放区域,则向管理人员的终端设备发送第一提示信息。
9、通过采用上述技术方案,获取多个非机动车停放区域内的视频信息,从而便于得知停放区域内的具体停放情况,对视频信息进行特征识别即可得到非机动车特征,识别到非机动车特征后即可根据非机动车特征确定非机动车的具体停放的姿态信息,姿态信息表征非机动车的摆放情况是否停放歪斜等,因此根据每个非机动车的姿态信息即可确定出每个停放区域的混乱度,预设混乱度阈值作为判定停放过于混乱的分界点,若存在达到预设混乱度阈值的目标停放区域,说明目标停放区域过于混乱,需要及时管理,向管理人员的终端设备发送第一提示信息,从而使得管理人员及时得知目标停放区域过于混乱,进而及时赶到目标停放区域现场进行管理整治。
10、在另一种可能实现的方式中,所述基于所述非机动车特征确定非机动车的姿态信息,基于所述姿态信息确定每个停放区域的混乱度,包括:
11、从所述非机动车特征中确定出仪表盘中心点以及后座中心点;
12、基于所述仪表盘中心点以及后座中心点进行连线,得到线段,所述线段表征所述姿态信息;
13、确定所述线段与预设基准线段之间的夹角,所述预设基准线段表征标准姿态;
14、确定出夹角大于预设夹角阈值的目标非机动车特征;
15、对每个后座中心点进行连线得到折线段,并确定所述折线段的平直程度;
16、基于所述平直程度以及所述目标非机动车特征确定混乱度。
17、在另一种可能实现的方式中,所述确定所述折线段的平直程度,包括:
18、将所述折线段映射到预设坐标系中,并确定每个弯折处点的坐标;
19、基于所述坐标确定所述折线段上相邻两个弯折处点在y轴方向上的距离;
20、确定所述距离的方差,所述方差表征所述平直程度。
21、在另一种可能实现的方式中,基于所述平直程度以及所述目标非机动车特征确定混乱度,包括:
22、确定所述目标非机动车特征的第一数量以及所述非机动车特征的第二数量,并确定第一数量和第二数量之间的比值;
23、基于所述比值、所述平直程度以及各自对应的权重计算每个停放区域的第一得分,所述第一得分表征所述混乱度。
24、在另一种可能实现的方式中,向管理人员的终端设备发送第一提示信息,包括:
25、获取所述目标停放区域的第一位置信息以及多个管理人员各自对应的第二位置信息;
26、基于所述第一位置信息以及第二位置信息确定每个管理人员到所述目标停放区域的距离信息;
27、基于所述第一得分以及所述方差确定所述目标停放区域的管理人员所需数量;
28、继续所述距离信息由小到大对管理人员进行排序,得到排序结果;
29、向所述排序结果中前所需数量个管理人员的终端设备发送第一提示信息。
30、在另一种可能实现的方式中,所述基于所述第一得分以及所述方差确定所述目标停放区域的管理人员所需数量,包括:
31、若所述方差达到预设方差阈值,则基于所述方差、所述第一得分以及各自对应的系数确定第二得分,从多个第一预设得分区间中确定所述第二得分所在的第一目标得分区间,每个第一预设得分区间对应有预设所需数量,将所述第一目标得分区间对应的预设所需数量确定为所述所需数量;
32、若所述方差未达到预设方差阈值,则从多个第二预设得分区间中确定所述第一得分所在的第二目标得分区间,每个第二预设得分区间对应有预设所需数量,将所述第二目标得分区间对应的预设所需数量确定为所述所需数量。
33、在另一种可能实现的方式中,所述方法还包括:
34、获取所述目标非机动车特征的牌照信息;
35、基于所述牌照信息确定所述目标非机动车的所属人员,并向所属人员对应的终端设备发送第二提示信息。
36、第二方面,本技术提供一种城市内非机动车管理装置,采用如下的技术方案:
37、一种城市内非机动车管理装置,包括:
38、视频获取模块,用于获取多个非机动车停放区域各自对应的视频信息;
39、特征识别模块,用于对所述视频信息进行特征识别,得到每个停放区域内的非机动车特征;
40、姿态确定模块,用于基于所述非机动车特征确定非机动车的姿态信息;
41、混乱度确定模块,用于基于所述姿态信息确定每个停放区域的混乱度;
42、第一发送模块,用于当存在混乱度达到预设混乱度阈值的目标停放区域时,向管理人员的终端设备发送第一提示信息。
43、通过采用上述技术方案,视频获取模块获取多个非机动车停放区域内的视频信息,从而便于得知停放区域内的具体停放情况,特征识别模块对视频信息进行特征识别即可得到非机动车特征,识别到非机动车特征后姿态确定模块即可根据非机动车特征确定非机动车的具体停放的姿态信息,姿态信息表征非机动车的摆放情况是否停放歪斜等,因此混乱度确定模块根据每个非机动车的姿态信息即可确定出每个停放区域的混乱度,预设混乱度阈值作为判定停放过于混乱的分界点,若存在达到预设混乱度阈值的目标停放区域,说明目标停放区域过于混乱,需要及时管理,第一发送模块向管理人员的终端设备发送第一提示信息,从而使得管理人员及时得知目标停放区域过于混乱,进而及时赶到目标停放区域现场进行管理整治。
44、在另一种可能的实现方式中,所述姿态确定模块在基于所述非机动车特征确定非机动车的姿态信息时,具体用于:
45、从所述非机动车特征中确定出仪表盘中心点以及后座中心点;
46、基于所述仪表盘中心点以及后座中心点进行连线,得到线段,所述线段表征所述姿态信息;
47、所述混乱度确定模块基于所述姿态信息确定每个停放区域的混乱度时,具体用于:
48、确定所述线段与预设基准线段之间的夹角,所述预设基准线段表征标准姿态;
49、确定出夹角大于预设夹角阈值的目标非机动车特征;
50、对每个后座中心点进行连线得到折线段,并确定所述折线段的平直程度;
51、基于所述平直程度以及所述目标非机动车特征确定混乱度。
52、在另一种可能的实现方式中,所述混乱度确定模块在确定所述折线段的平直程度时,具体用于:
53、将所述折线段映射到预设坐标系中,并确定每个弯折处点的坐标;
54、基于所述坐标确定所述折线段上相邻两个弯折处点在y轴方向上的距离;
55、确定所述距离的方差,所述方差表征所述平直程度。
56、在另一种可能的实现方式中,所述混乱度确定模块在基于所述平直程度以及所述目标非机动车特征确定混乱度时,具体用于:
57、确定所述目标非机动车特征的第一数量以及所述非机动车特征的第二数量,并确定第一数量和第二数量之间的比值;
58、基于所述比值、所述平直程度以及各自对应的权重计算每个停放区域的第一得分,所述第一得分表征所述混乱度。
59、在另一种可能的实现方式中,所述第一发送模块在向管理人员的终端设备发送第一提示信息时,具体用于:
60、获取所述目标停放区域的第一位置信息以及多个管理人员各自对应的第二位置信息;
61、基于所述第一位置信息以及第二位置信息确定每个管理人员到所述目标停放区域的距离信息;
62、基于所述第一得分以及所述方差确定所述目标停放区域的管理人员所需数量;
63、继续所述距离信息由小到大对管理人员进行排序,得到排序结果;
64、向所述排序结果中前所需数量个管理人员的终端设备发送第一提示信息。
65、在另一种可能的实现方式中,所述第一发送模块在基于所述第一得分以及所述方差确定所述目标停放区域的管理人员所需数量时,具体用于:
66、若所述方差达到预设方差阈值,则基于所述方差、所述第一得分以及各自对应的系数确定第二得分,从多个第一预设得分区间中确定所述第二得分所在的第一目标得分区间,每个第一预设得分区间对应有预设所需数量,将所述第一目标得分区间对应的预设所需数量确定为所述所需数量;
67、若所述方差未达到预设方差阈值,则从多个第二预设得分区间中确定所述第一得分所在的第二目标得分区间,每个第二预设得分区间对应有预设所需数量,将所述第二目标得分区间对应的预设所需数量确定为所述所需数量。
68、在另一种可能的实现方式中,所述装置还包括:
69、牌照获取模块,用于获取所述目标非机动车特征的牌照信息;
70、第二发送模块,用于基于所述牌照信息确定所述目标非机动车的所属人员,并向所属人员对应的终端设备发送第二提示信息。
71、第三方面,本技术提供一种电子设备,采用如下的技术方案:
72、一种电子设备,该电子设备包括:
73、至少一个处理器;
74、存储器;
75、至少一个应用程序,其中至少一个应用程序被存储在存储器中并被配置为由至少一个处理器执行,至少一个配置用于:执行根据第一方面任一种可能的实现方式所示的一种城市内非机动车管理方法。
76、第四方面,本技术提供一种计算机可读存储介质,采用如下的技术方案:
77、一种计算机可读存储介质,当所述计算机程序在计算机中执行时,令所述计算机执行第一方面任一项所述的一种城市内非机动车管理方法。
78、综上所述,本技术包括以下至少一种有益技术效果:
79、获取多个非机动车停放区域内的视频信息,从而便于得知停放区域内的具体停放情况,对视频信息进行特征识别即可得到非机动车特征,识别到非机动车特征后即可根据非机动车特征确定非机动车的具体停放的姿态信息,姿态信息表征非机动车的摆放情况是否停放歪斜等,因此根据每个非机动车的姿态信息即可确定出每个停放区域的混乱度,预设混乱度阈值作为判定停放过于混乱的分界点,若存在达到预设混乱度阈值的目标停放区域,说明目标停放区域过于混乱,需要及时管理,向管理人员的终端设备发送第一提示信息,从而使得管理人员及时得知目标停放区域过于混乱,进而及时赶到目标停放区域现场进行管理整治。
- 还没有人留言评论。精彩留言会获得点赞!