车辆通行策略的确定方法、装置、计算机设备及存储介质与流程
本公开涉及智能网联汽车,具体涉及车辆通行策略的确定方法、装置、计算机设备及存储介质。
背景技术:
1、随着智慧园区以及智能网联汽车技术的不断发展,自动驾驶小巴与自动驾驶物流车在智慧园区的身影越来越频繁,自动驾驶小巴车可以提供园区内的接泊业务,而自动驾驶物流车可以提供智慧园区内部的货物运输的功能,打造园区内部的人和货物的高效便捷运输,在这种情况背景下,就需要园区内部的自动驾驶车辆在行驶过程中高效合理的运行,同时也要保障时效性与可靠性,同时也要减少在园区内部交叉路口地方拥堵的情况出现,就需要自动驾驶车辆在驾驶的决策行为上有一定的智慧性与合理性。
2、当前在自动驾驶车辆通行决策的确定方法上,存在两种常见方法:1、基于建立当前园区的园区道路模型与任务模型来确定初始路线,通过遗传算法对路线进行优化并同时监测车辆的驾驶行为进行处理。该方法虽对预期的行驶路线做了处理,但在实际的情况下会由于其他障碍物的出现而受到影响,无法及时的更正处理,并且还需要人为的介入来解决问题,违背了高效与便捷的初衷与出发点,并且还需要园区模型等相关介入,无法做到通用性与泛化性,比较局限。
3、2、基于动态窗口避障算法对智能汽车进行路径规划,并根据感知系统来决定是否需要重规划的避障路径或者其他驾驶行为。该方法比较依赖于预设的车道内势场模型、车道间的势场模型以及障碍物的势场模型和多项式的模型来进行后续的计算处理,增加了不确定性与复杂性,在后续的决策规划中还需要对候选的轨迹簇进行评价处理优化,增大了计算的耗时与复杂度。
4、因此,在汽车园区交叉路口道路场景下,关于自动驾驶车辆的通行策略规划上,相关技术存在通用性和泛化性较差,计算复杂度和耗时均较高的问题。
技术实现思路
1、有鉴于此,本公开提供了一种车辆通行策略的确定方法、装置、计算机设备及存储介质,以解决在自动驾驶车辆的通行策略规划上,相关技术存在通用性和泛化性较差,计算复杂度和耗时均较高的问题。
2、第一方面,本公开提供了一种车辆通行策略的确定方法,该方法包括:
3、获取处于路口交汇环境下各个参与车辆的主从优先级;
4、根据主从优先级确定参与车辆之间的安全距离范围;
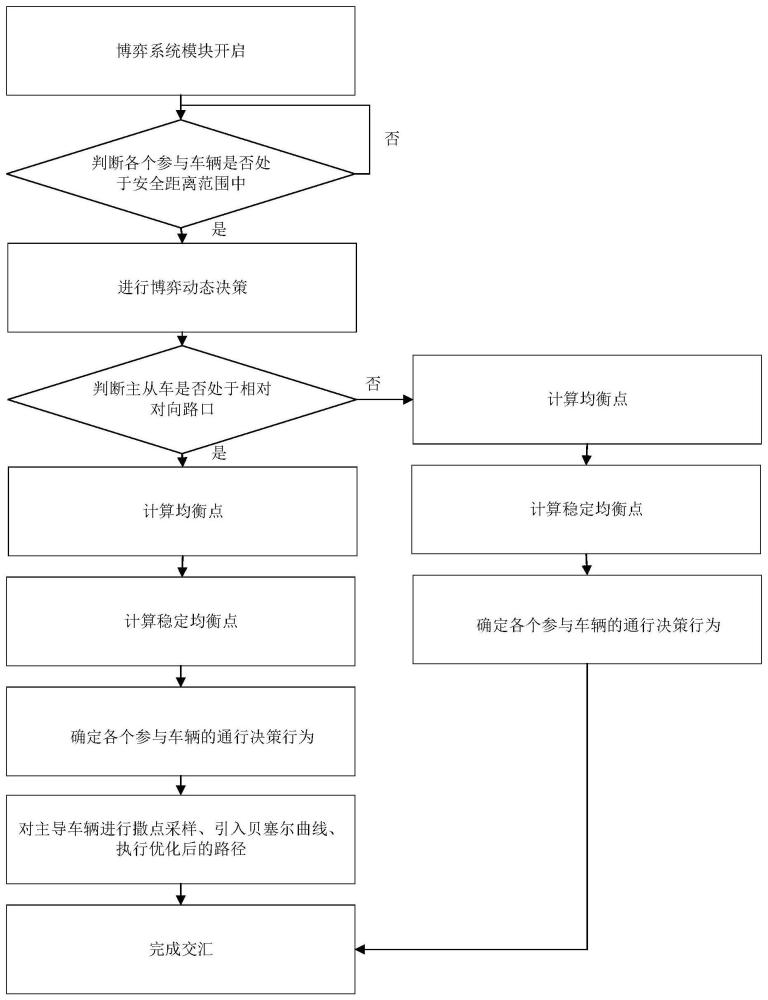
5、在参与车辆行驶并落入安全距离范围内之后,确定参与车辆的博弈体系要素;
6、根据博弈体系要素确定稳定均衡点,其中,稳定均衡点包含于安全距离范围之内;
7、根据参与车辆与稳定均衡点之间的距离,确定参与车辆的通行策略,或者根据距离和参与车辆的车速,确定参与车辆的通行策略。
8、在本公开实施例中,通过获取到参与车辆的主从优先级,并根据主从优先级确定参与车辆之间的安全距离范围,在参与车辆到达安全距离范围之后,根据博弈体系要素确定出稳定均衡点,再基于参与车辆与稳定均衡点之间的距离或者参与车辆与稳定均衡点之间的距离和车速,确定出每个参与车辆的通行策略。这样本公开实施例引入博弈论的思想以及v2x智能网联汽车技术相结合的行驶决策方法,不仅可以解决相关技术存在的时效与便捷的问题,而且可以简化车辆间通行决策的复杂计算过程,并且可以通过动态博弈的决策策略扩展到更广泛的区域,扩展性强,提升了效率的同时也降低了成本,解决了相关技术在自动驾驶车辆的通行策略规划上,存在通用性和泛化性较差,计算复杂度和耗时均较高的问题。
9、在一种可选的实施方式中,根据主从优先级确定参与车辆之间的安全距离范围,包括:
10、根据主从优先级,确定参与车辆中对应的主导车辆和服从车辆;
11、获取主导车辆的横向角与服从车辆的横向角之间的偏差、符号函数、主导车辆的减速度、决策系统的反应时间以及主导车辆的横向角和服从车辆的横向角之间存在交叉范围下执行紧急制动,使得车辆停止后的距离冗余;
12、根据主导车辆的车速、服从车辆的车速、偏差、符号函数、主导车辆的减速度、反应时间以及距离冗余,确定安全距离范围。
13、在本公开实施例中,通过确定出参与车辆之间的安全距离范围,基于该安全距离范围确定参与车辆的通行策略,保证了参与车辆之间避免发生碰撞情况,可行解更优,效果更好。
14、在一种可选的实施方式中,确定参与车辆的博弈体系要素,包括:
15、将主导车辆和服从车辆,设置为博弈体系第一要素;
16、获取主导车辆的多个第一参考通行策略以及服从车辆的多个第二参考通行策略,并将第一参考通行策略以及第二参考通行策略设置为博弈体系第二要素;
17、根据博弈体系第一要素和博弈体系第二要素,确定主导车辆的第一策略期望收益和服从车辆的第二策略期望收益,并将第一策略期望收益和第二策略期望收益设置为博弈体系第三要素。
18、在一种可选的实施方式中,根据博弈体系要素确定稳定均衡点,包括:
19、将博弈体系第二要素中的第一参考通行策略与第二参考通行策略进行组合,确定博弈体系第一要素中的主导车辆的多个第一损失值和博弈体系第一要素中的服从车辆的多个第二损失值;
20、获取主导车辆在选择不同的第一参考通行策略下对应的第一概率值和服从车辆在选择不同的第二参考通行策略下对应的第二概率值;
21、根据第一损失值、第一概率值以及主导车辆的基础收益值,确定博弈体系第三要素中的第一策略期望收益;
22、根据第二损失值、第二概率值以及服从车辆的基础收益值,确定博弈体系第三要素中的第二策略期望收益;
23、根据第一策略期望收益,确定主导车辆的第一复制动态方程;
24、根据第二策略期望收益,确定服从车辆的第二复制动态方程;
25、将第一概率值设置为预设数值,将第二概率值设置为预设数值,结合第一复制动态方程和第二复制动态方程,得到均衡点;
26、根据均衡点和由第一复制动态方程和第二复制动态方程构建的目标矩阵,得到稳定均衡点。
27、在本公开实施例中,采用的基于博弈的策略不仅可以减少复杂的局部规划问题,并且还简化了在局部路径规划中的复杂计算过程,同时将问题解耦与分层,对不同的对象车辆进行不同的策略处理,求解空间大,可行解更优,效果更好,并且该种方法的扩展性强,可推广到更多类似的场景与环境下,提升了效率的同时也降低了成本。
28、在一种可选的实施方式中,根据参与车辆与稳定均衡点之间的距离,确定参与车辆的通行策略,或者根据距离和参与车辆的车速,确定参与车辆的通行策略,包括:
29、在主导车辆距离稳定均衡点的数值大于服从车辆距离稳定均衡点的数值的情况下,主导车辆的通行策略为减速避让,服从车辆的通行策略为加速通过;
30、在主导车辆距离稳定均衡点的数值小于服从车辆距离稳定均衡点的数值的情况下,主导车辆的通行策略为加速通过,服从车辆的通行策略为减速避让;
31、在主导车辆距离稳定均衡点的数值等于服从车辆距离稳定均衡点的数值的情况下,获取主导车辆的第一车速和服从车辆的第二车速;
32、在第一车速大于第二车速的情况下,主导车辆的通行策略为加速通过,服从车辆的通行策略为减速避让,否则主导车辆的通行策略为减速避,服从车辆的通行策略为加速通过。
33、在一种可选的实施方式中,获取处于路口交汇环境下各个参与车辆的主从优先级,包括:
34、获取各个参与车辆的车速;
35、根据车速确定参与车辆的主从优先级。
36、在本公开实施例中,根据参与车辆的车速来确定车辆的主从优先级,能够快速确定主从地位,节省时间效率。
37、在一种可选的实施方式中,在根据参与车辆与稳定均衡点之间的距离,确定参与车辆的通行策略,或者根据距离和参与车辆的车速,确定参与车辆的通行策略之后,方法还包括:
38、获取主导车辆在预设方向下每隔预设距离得到的采样点;
39、对采样点构成的曲线进行平滑处理,得到平滑后的曲线;
40、根据平滑后的曲线确定主导车辆的目标行驶路径,其中,目标行驶路径为主导车辆在执行通行策略之后的待行驶路径。
41、在本公开实施例中,通过引入贝塞尔曲线优化思想进行临时避让通行,以此用来在横向方向上避让服从车辆,更加安全可靠。
42、第二方面,本公开提供了一种车辆通行策略的确定装置,该装置包括:
43、第一获取模块,用于获取处于路口交汇环境下各个参与车辆的主从优先级;
44、第一确定模块,用于根据主从优先级确定参与车辆之间的安全距离范围;
45、第二确定模块,用于在参与车辆行驶并落入安全距离范围内之后,确定参与车辆的博弈体系要素;
46、第三确定模块,用于根据博弈体系要素确定稳定均衡点,其中,稳定均衡点包含于安全距离范围之内;
47、第四确定模块,用于根据参与车辆与稳定均衡点之间的距离,确定参与车辆的通行策略,或者根据距离和参与车辆的车速,确定参与车辆的通行策略。
48、第三方面,本公开提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的车辆通行策略的确定方法。
49、第四方面,本公开提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的车辆通行策略的确定方法。
- 还没有人留言评论。精彩留言会获得点赞!