参考线生成方法、装置及设备与流程
本技术涉及自动驾驶,尤其涉及一种参考线生成方法、装置及设备。
背景技术:
1、参考线是计算出自动驾驶车辆可驾驶、体感良好的规划路线。自动驾驶的路径规划和速度规划都是基于参考线进行的,即参考线技术是自动驾驶规划技术的基础技术。
2、目前,是基于车道信息和车辆位置信息生成参考线,也即所生成的参考线中仅包含车道信息和位置信息,所包含信息过少,不便于决策规划模块进行规划和决策。
3、综上所述,如何增加参考线所包含的信息,以便于决策规划模块进行相关行为决策,是目前本领域技术人员亟待解决的技术问题。
技术实现思路
1、有鉴于此,本技术的目的是提供一种参考线生成方法、装置及设备,用于增加参考线所包含的信息,以便于决策规划模块进行相关行为决策。
2、为了实现上述目的,本技术提供如下技术方案:
3、一种参考线生成方法,包括:
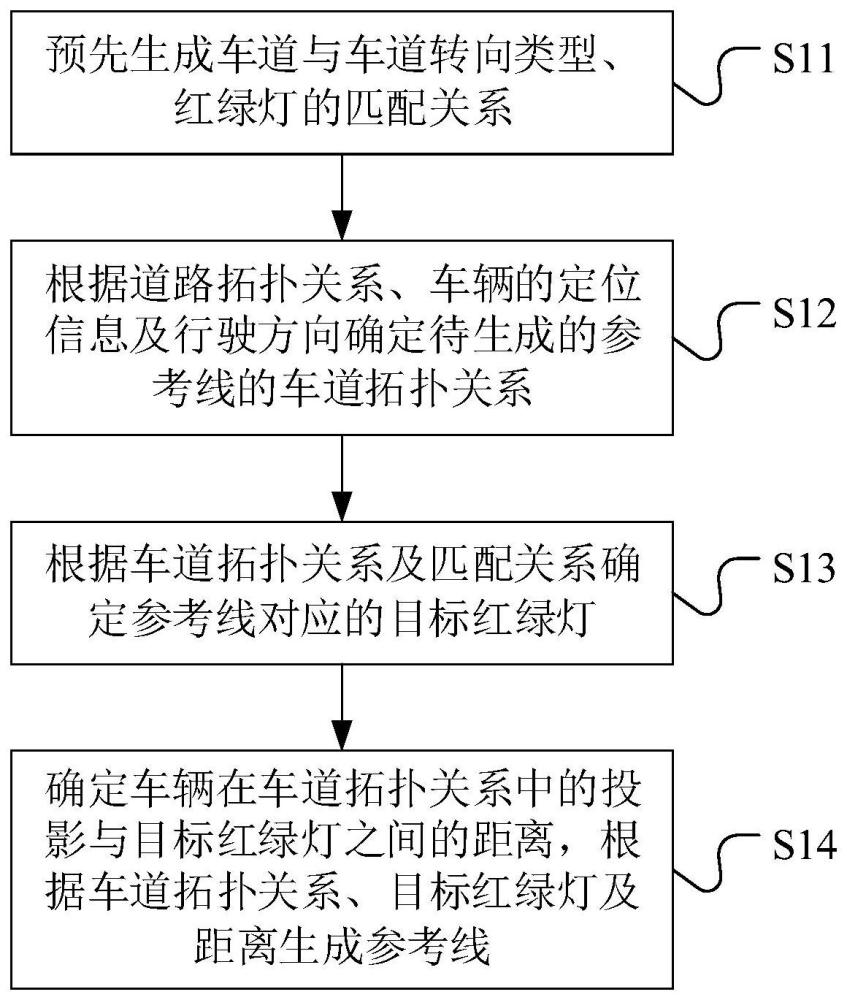
4、预先生成车道与车道转向类型、红绿灯的匹配关系;
5、根据道路拓扑关系、车辆的定位信息及行驶方向确定待生成的参考线的车道拓扑关系;
6、根据所述车道拓扑关系及所述匹配关系确定所述参考线对应的目标红绿灯;
7、确定所述车辆在所述车道拓扑关系中的投影与所述目标红绿灯之间的距离,根据所述车道拓扑关系、所述目标红绿灯及所述距离生成所述参考线。
8、可选地,根据道路拓扑关系、车辆的定位信息及行驶方向确定待生成的参考线的车道拓扑关系,包括:
9、根据所述车辆的定位信息及高精度地图确定所述车辆所在车道;
10、根据所述车辆所在车道、所述道路拓扑关系、所述车辆的定位信息及所述车辆的行驶方向,确定所述参考线的车道拓扑关系。
11、可选地,根据所述车道拓扑关系及所述匹配关系确定所述参考线对应的目标红绿灯,包括:
12、根据所述车道拓扑关系中包含的第一目标车道、所述车辆的行驶方向及所述匹配关系确定所述目标红绿灯;
13、其中,所述第一目标车道为所述车辆所在车道、按照所述车辆的行驶方向位于所述车辆所在车道前方的车道。
14、可选地,根据所述车道拓扑关系中包含的第一目标车道、所述车辆的行驶方向及所述匹配关系确定所述目标红绿灯,包括:
15、根据所述第一目标车道中的第二目标车道、所述车辆的行驶方向及所述匹配关系确定所述目标红绿灯;
16、其中,所述第二目标车道为所述第一目标车道中距离所述车辆最近且匹配有红绿灯的车道。
17、可选地,在确定所述车辆在所述车道拓扑关系中的投影与所述目标红绿灯之间的距离之前,还包括:
18、将所述红绿灯的位置修正到对应车道的终点处。
19、可选地,在根据所述车道拓扑关系、所述目标红绿灯及所述距离生成所述参考线之后,还包括:
20、获取所述参考线中包含的所述目标红绿灯的状态,根据所述参考线中包含的所述目标红绿灯的状态对所述车辆的运行进行控制。
21、可选地,根据所述参考线中包含的所述目标红绿灯的状态对所述车辆的运行进行控制,包括:
22、若所述参考线中包含的所述目标红绿灯为绿灯且无第一倒计时时间,则控制所述车辆以当前速度运行。
23、可选地,根据所述参考线中包含的所述目标红绿灯的状态对所述车辆的运行进行控制,包括:
24、若所述参考线中包含的所述目标红绿灯为绿灯且有第一倒计时时间,则根据所述参考线中包含的所述车辆与所述目标红绿灯之间的距离、所述车辆的当前速度及所述第一倒计时时间计算得到所述车辆的加速度,并根据所述车辆的加速度及所述第一倒计时时间计算所述车辆到达所述目标红绿灯处时的第一理论速度;
25、若所述第一理论速度未超过预设速度且所述加速度未超过预设加速度,则控制所述车辆以所述加速度运行,以在所述目标红绿灯为绿灯时通过所述目标红绿灯;
26、若所述第一理论速度超过预设速度和/或所述加速度超过预设加速度,则根据所述车辆的当前速度及所述车辆与所述目标红绿灯之间的距离计算所述车辆的第一减速度,控制所述车辆以所述第一减速度减速运行,以停止在所述目标红绿灯处等红灯。
27、可选地,根据所述参考线中包含的所述目标红绿灯的状态对所述车辆的运行进行控制,包括:
28、若所述参考线中包含的所述目标红绿灯为红灯且无第二倒计时时间,则根据所述车辆的当前速度及所述参考线中包含的所述车辆与所述目标红绿灯之间的距离计算所述车辆的第二减速度,控制所述车辆以所述第二减速度减速运行,以停止在所述目标红绿灯处等红灯。
29、可选地,根据所述参考线中包含的所述目标红绿灯的状态对所述车辆的运行进行控制,包括:
30、若所述参考线中包含的所述目标红绿灯为红灯且有第二倒计时时间,则根据所述车辆的当前速度及所述第二倒计时时间计算得到所述车辆的匀速行驶距离;
31、若所述匀速行驶距离小于或等于所述参考线中包含的所述车辆与所述目标红绿灯之间的距离,则控制所述车辆以所述当前速度匀速行驶;
32、若所述匀速行驶距离大于所述车辆与所述目标红绿灯之间的距离,则根据所述车辆与所述目标红绿灯之间的距离、所述第二倒计时时间及所述车辆的当前速度按照所述车辆匀减速运动的方式计算所述车辆到达所述目标红绿灯处时的第二理论速度;
33、若所述第二理论速度不小于0,则根据所述第二理论速度、所述车辆的当前速度计算最小减速度,并根据所述最小减速度对所述车辆的运行进行控制;
34、若所述第二理论速度小于0,则根据所述车辆的当前速度及所述车辆与所述目标红绿灯之间的距离计算所述车辆的第三减速度,控制所述车辆以所述第三减速度减速运行。
35、可选地,预先生成车道与车道转向类型、红绿灯的匹配关系,包括:
36、预先获取车道的位置信息、红绿灯的位置信息及所述道路拓扑关系;
37、根据所述车道的位置信息、所述红绿灯的位置信息及所述道路拓扑关系生成所述匹配关系。
38、一种参考线生成装置,包括:
39、预先生成模块,用于预先生成车道与车道转向类型、红绿灯的匹配关系;
40、第一确定模块,用于根据道路拓扑关系、车辆的定位信息及行驶方向确定待生成的参考线的车道拓扑关系;
41、第二确定模块,用于根据所述车道拓扑关系及所述匹配关系确定所述参考线对应的目标红绿灯;
42、生成参考线模块,用于确定所述车辆在所述车道拓扑关系中的投影与所述目标红绿灯之间的距离,根据所述车道拓扑关系、所述目标红绿灯及所述距离生成所述参考线。
43、一种参考线生成设备,包括:
44、存储器,用于存储计算机程序;
45、处理器,用于执行所述计算机程序时实现如上述任一项所述的参考线生成方法的步骤。
46、本技术提供了一种参考线生成方法、装置及设备,其中,该方法包括:预先生成车道与车道转向类型、红绿灯的匹配关系;根据道路拓扑关系、车辆的定位信息及行驶方向确定待生成的参考线的车道拓扑关系;根据车道拓扑关系及匹配关系确定参考线对应的目标红绿灯;确定车辆在车道拓扑关系中的投影与目标红绿灯之间的距离,根据车道拓扑关系、目标红绿灯及距离生成参考线。
47、本技术公开的上述技术方案,根据道路拓扑关系、车辆的定位信息及车辆的行驶方向确定待生成的参考线的车道拓扑关系,然后,根据待生成的参考线的车道拓扑关系以及预先生成的车道与红绿灯、车道转向类型的匹配关系确定参考线对应的目标红绿灯,并确定车辆在车道拓扑关系中的投影与目标红绿灯之间的距离,之后,根据待生成的参考线的车道拓扑关系、对应的目标红绿灯以及该目标红绿灯与车辆在车道拓扑关系中的投影之间的距离生成参考线,以使得所生成的参考线中不仅包含有车道信息和车辆的位置信息,而且还包含有红绿灯信息,从而增加车辆所在参考线所包含的信息,以使得下游的决策规划模块在做规划决策时只需关注车辆所在的参考线,从而便于提高规划决策的运算效率,并提高规划决策结果的合理性和可靠性。
48、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!