一种滑坡灾害监测预警方法
本发明属于滑坡地质灾害监测,具体涉及一种滑坡灾害监测预警方法。
背景技术:
1、滑坡是指斜坡上的土体或者岩体,受河流冲刷、地下水活动、雨水浸泡、地震及人工切坡等因素影响,在重力作用下,沿着一定的软弱面或者软弱带,整体地或者分散地顺坡向下滑动的自然现象。
2、滑坡监测是了解滑坡灾害发展、洞悉灾害发生原因的重要手段,通过对滑坡体进行长期的跟踪监测,不仅能够及时发现险情,同时可探究其发生的规律,为滑坡预警提供重要依据。
3、由于滑坡地形条件限制,传统人工调查方法存在效率低、风险高、难度大等问题。卫星遥感图像、三维激光扫描仪、地基合成孔径雷达、gnss技术等高新技术已运用于滑坡灾害调查及监测研究,虽然这些方法有各自的优势,但也存在各自的局限性。卫星遥感图像精度较低,仅适用于大范围滑坡的初步调查,实时性也难以保证;三维激光扫描仪、地基合成孔径雷达价格昂贵,对处理技术要求高;gnss技术虽能测量高精度三维位移,但其接收机价格昂贵制约了该技术的发展。
技术实现思路
1、本发明所要解决的技术问题在于针对上述现有技术中的不足,提供一种滑坡灾害监测预警方法,其方法步骤简单、设计合理,摄像机监测系统实时采集滑坡区域图像,基于优化后滑坡区域图像通过多视角立体视觉技术,得到两期待监测滑坡面点云的m3c2值,并基于m3c2值获取滑坡变形速率最大值,以便于根据滑坡变形速率最大值判断预警,实现滑坡灾害实时监测与预警。
2、为解决上述技术问题,本发明采用的技术方案是:一种滑坡灾害监测预警方法,其特征在于,该方法包括以下步骤:
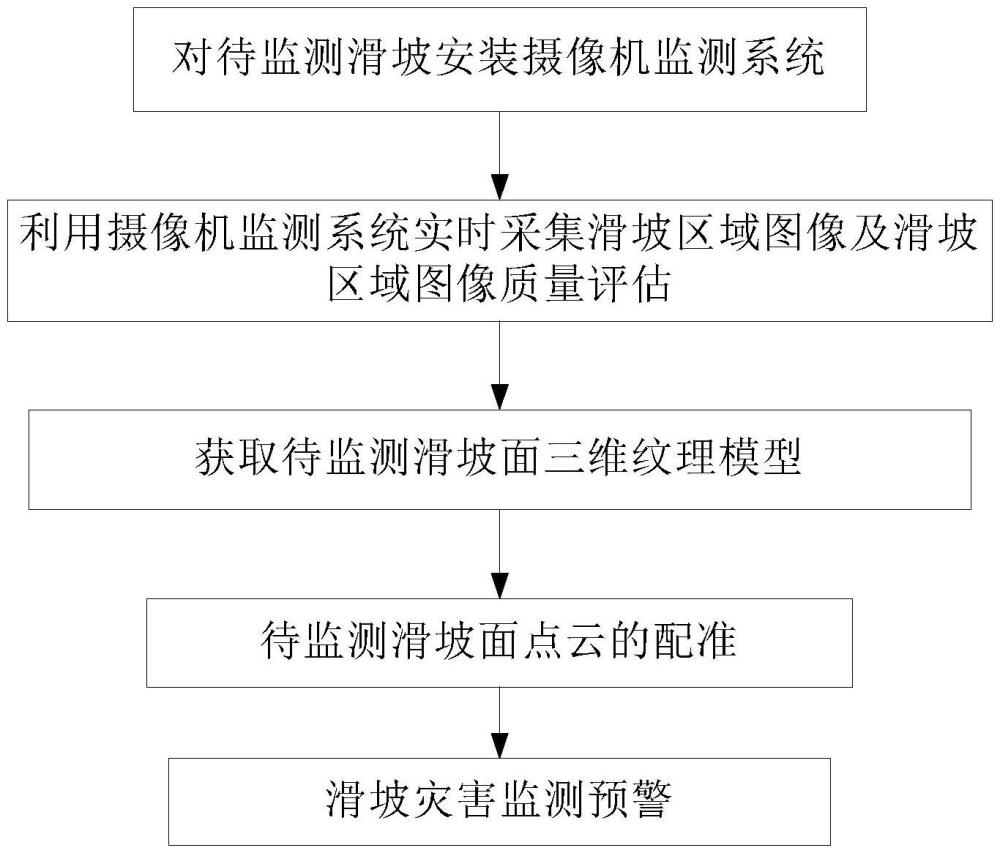
3、步骤一、对待监测滑坡安装摄像机监测系统;
4、步骤二、利用摄像机监测系统实时采集滑坡区域图像及滑坡区域图像质量评估:
5、步骤201、采用摄像机监测系统对待监测滑坡的滑坡面进行图像采集,并将采集到的多个滑坡面局部图像发送至计算机;
6、步骤202、计算机对接收到的任一幅滑坡面局部图像经过灰度处理,得到滑坡面局部灰度图像;
7、步骤203、计算机对任一幅滑坡面局部灰度图像利用拉普拉斯算子获取滑坡面局部图像中每一个像素点的8邻域微分值,并将所有像素点的8邻域微分值求和,得到图像质量评估值;
8、步骤204、采用计算机将将图像质量评估值和与设定阈值进行比较,如果图像质量评估值小于设定阈值,则对应的滑坡面局部图像为低质量监测图像;如果图像质量评估值大于等于设定阈值,则对应的滑坡面局部图像为高质量监测图像;
9、步骤205、采用计算机对低质量监测图像进行优化,得到优化后监测图像;
10、步骤206、将优化后监测图像和高质量监测图像作为待处理监测图像;
11、步骤三、获取待监测滑坡面三维纹理模型:
12、步骤301、采用计算机利用sifi特征提取算法对每一幅待处理监测图像分别进行特征点提取,得到多个特征点描述子向量;
13、步骤302、采用计算机利用特征点描述子向量的欧氏距离对每组两幅待处理监测图像的特征点进行匹配,得到多个匹配点对;
14、步骤303、采用计算机利用ransac算法对每组两幅待处理监测图像的多个匹配点对进行处理,得到摄像机监测系统中相机的投影矩阵;
15、步骤304、采用计算机利用每组两幅待处理监测图像的多个匹配点对及相机的投影矩阵,得到待监测滑坡面的稀疏点云;
16、步骤305、采用计算机利用多视角立体视觉三维重建算法,输入步骤303中投影矩阵,对待监测滑坡面的稀疏点云进行处理,获取待监测滑坡面的稠密点云;
17、步骤306、采用计算机利用泊松曲面重建算法将稠密点云连接成网格,形成待监测滑坡面三维模型;
18、步骤307、采用计算机利用agisoft photoscan软件将待处理监测图像进行纹理贴图至待监测滑坡面三维模型表面,生成待监测滑坡面三维纹理模型;
19、步骤四、待监测滑坡面点云的配准:
20、步骤401、采用计算机将待监测滑坡面三维纹理模型导入cloudcompare软件中,获取当前期待监测滑坡面点云;
21、步骤402、按照步骤二、步骤三和步骤401的方法,得到下一期待监测滑坡面点云;
22、步骤403、采用计算机对当前期待监测滑坡面点云和下一期待监测滑坡面点云进行配准,得到配准后的当前期待监测滑坡面点云和配准后的下一期待监测滑坡面点云;
23、步骤五、滑坡灾害监测预警:
24、步骤501、采用计算机将配准后的当前期待监测滑坡面点云和配准后的下一期待监测滑坡面点云导入cloudcompare软件中,得到下一期点云中各个点相对当前期点云的m3c2值;
25、步骤502、采用计算机将下一期点云中任一个点相对当前期点云的m3c2值记作d(m3c2),并根据s=d(m3c2)/t,得到待监测滑坡面任一个点对应的滑坡变形速率s;其中,t表示相邻两期点云的时间间隔;
26、步骤503、多次重复步骤502,得到待监测滑坡面多个点对应的滑坡变形速率,并从待监测滑坡面多个点对应的滑坡变形速率中选择最大的滑坡变形速率记作滑坡变形速率最大值;
27、步骤504、采用计算机将滑坡变形速率最大值和滑坡变形速率设计阈值进行比较,如果滑坡变形速率最大值大于滑坡变形速率设计阈值,则计算机预警提醒。
28、上述的一种滑坡灾害监测预警方法,其特征在于:步骤一中对待监测滑坡安装摄像机监测系统,具体过程如下:
29、步骤101、以待监测滑坡的坡脚水平处任一点作为原点o,过原点o以待监测滑坡的宽度方向作为x轴,过原点o垂直x轴方向且指向滑坡表面方向作为y轴,过原点o垂直x轴和y轴且沿待监测滑坡的高度向上作为z轴;
30、步骤102、沿x轴方向间隔布设多个监测点;每个监测点布设至少一个摄像机监测模块;其中,每个所述摄像机监测模块包括微控制器、与微控制器连接的摄像头和与微控制器连接的无线通信模块;所述摄像头的拍摄面朝向滑坡表面,多个摄像头的拍摄范围覆盖了待监测滑坡整个的滑坡面区域。
31、上述的一种滑坡灾害监测预警方法,其特征在于:步骤205,具体过程如下:
32、步骤2051、采用计算机利用训练好的图像天气识别模型对低质量监测图像进行识别,输出低质量监测图像对应的天气状态;
33、步骤2052、如果低质量监测图像对应的天气状态为雨天,执行步骤2053;如果低质量监测图像对应的天气状态为雾天,执行步骤2054;
34、步骤2053、采用计算机利用基于生成式对抗网络深度学习的单幅图像去雨算法对该低质量监测图像进行去雨处理,得到去雨后监测图像;
35、步骤2054、如果低质量监测图像对应的天气状态为雾天,采用计算机利用基于暗通道先验的单幅图像去雾算法对该低质量监测图像进行去雾处理,得到去雾后监测图像;
36、步骤2055、采用计算机将去雨后监测图像和去雾后监测图像记作优化后监测图像。
37、上述的一种滑坡灾害监测预警方法,其特征在于:步骤403,具体过程如下:
38、步骤4031、采用计算机利用pca主元分析法,对当前期待监测滑坡面点云进行处理,得到当前期待监测滑坡面点云的方向包围盒obb;并将当前期待监测滑坡面点云的方向包围盒obb的对角线长度记作当前线段长度;
39、步骤4032、采用计算机利用pca主元分析法,对下一期待监测滑坡面点云进行处理,得到下一期待监测滑坡面点云的方向包围盒obb;并将下一期待监测滑坡面点云的方向包围盒obb的对角线长度记作下一期线段长度;
40、步骤4033、采用计算机将当前线段长度与下一期线段长度的比值记作初始尺度因子;
41、步骤4034、采用计算机将下一期待监测滑坡面点云按照初始尺度因子进行缩放,得到缩放后下一期待监测滑坡面点云;
42、步骤4035、采用计算机利用icp算法对缩放后下一期待监测滑坡面点云和当前期待监测滑坡面点云进行配准,得到配准后的当前期待监测滑坡面点云和配准后的下一期待监测滑坡面点云。
43、上述的一种滑坡灾害监测预警方法,其特征在于:步骤302,具体过程如下:
44、步骤3021、采用计算机将两幅待处理监测图像中一幅待处理监测图像中的第i个特征点的特征点描述子向量记作qi,计算机(9)将另一幅待处理监测图像的第p个特征点的特征点描述子向量记作q′p;其中,i和p均为正整数;
45、步骤3022、采用计算机根据qi和q′p,得到一幅待处理监测图像中第i个特征点与另一幅待处理监测图像中第p个特征点之间的欧式距离;
46、步骤3023、多次重复步骤3022,得到一幅待处理监测图像中第i个特征点与另一幅待处理监测图像中多个特征点之间的多个欧式距离;
47、步骤3024、采用计算机(9)将一幅待处理监测图像中第i个特征点与另一幅待处理监测图像中多个特征点之间的多个欧式距离按照从小到大顺序进行排序,获得最小欧式距离dmin和次小欧式距离dsub;
48、步骤3025、采用计算机根据公式得到最小欧式距离和次小欧式距离的比值
49、步骤3026、采用计算机(9)判断,当成立,执行步骤3027;否则,执行步骤3028;其中,阈值距离dyz的取值范围为0.7~0.85;
50、步骤3027、当成立,则一幅待处理监测图像中第i个特征点与最小欧式距离dmin所对应的另一幅待处理监测图像中的特征点为一组匹配点对;
51、步骤3028、计算机(9)剔除一幅待处理监测图像中第i个特征点,并重复步骤3022至步骤3027,对一幅待处理监测图像中第i+1个特征点进行匹配;
52、步骤3029、多次重复步骤3022至步骤3028,得到多组匹配点对。
53、上述的一种滑坡灾害监测预警方法,其特征在于:步骤2051中训练好的图像天气识别模型的获取,具体过程如下:
54、步骤a、通过摄像机监测系统预先获取多个雨天滑坡面局部图像、多个雾天滑坡面局部图像和多个晴天滑坡面局部图像作为训练集;
55、步骤b、将训练数据集中m个滑坡面局部图像的天气状态类型分别进行标记;其中,天气状态类型晴天、雨天和雾天;其中,m为正整数;
56、步骤c、采用计算机将训练集输入vgg16网络模型中进行训练,得到训练好的图像天气识别模型。
57、本发明与现有技术相比具有以下优点:
58、1、本发明方法步骤简单,设计合理,解决目前滑坡灾害监测预警成本高、实时性低等问题。
59、2、本发明摄像机监测系统按照设定拍摄时间间隔对待监测滑坡的滑坡面进行图像采集,并对任一个滑坡面局部图像采用图像质量评估值进行判断,小于设定阈值的为低质量监测图像,并对对低质量监测图像进行优化,以提高监测图像质量,提高了后续待监测滑坡面三维纹理模型准确性。
60、3、本发明利用优化后监测图像和高质量监测图像作为待处理监测图像,并利用多视角立体视觉三维重建算法,实现待监测滑坡面三维纹理模型生成,便于后续获取待监测滑坡面点云。
61、4、本发明对两期待监测滑坡面点云进行配准,得到配准后的当前期待监测滑坡面点云和配准后的下一期待监测滑坡面点云,便于后续获取下一期点云中各个点相对当前期点云的m3c2值。
62、5、本发明利用下一期点云中任一个点相对当前期点云的m3c2值的绝对值与相邻两期点云的时间间隔比值记作待监测滑坡面任一个点对应的滑坡变形速率,并从待监测滑坡面多个点对应的滑坡变形速率中选择滑坡变形速率最大值,如果滑坡变形速率最大值大于滑坡变形速率设计阈值,则计算机预警提醒,实现滑坡灾害监测预警。
63、综上所述,本发明方法步骤简单、设计合理,摄像机监测系统实时采集滑坡区域图像,基于优化后滑坡区域图像通过多视角立体视觉技术,得到两期待监测滑坡面点云的m3c2值,并基于m3c2值获取滑坡变形速率最大值,以便于根据滑坡变形速率最大值判断预警,实现滑坡灾害实时监测与预警。
64、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!