一种考虑车辆间动态交互作用的轨迹预测方法
本发明涉及自动驾驶的,尤其是指一种考虑车辆间动态交互作用的轨迹预测方法。
背景技术:
1、随着自动驾驶技术的不断发展,对周围车辆轨迹的准确预测成为了实现安全自动驾驶的关键。自动驾驶车辆需要预测其它车辆未来的行驶轨迹,以便做出相应的决策和规划行驶路线。针对车辆轨迹预测的研究取得了长足的进展,涌现出了许多方法和技术。传统的基于模型的方法是通过建立数学模型来描述车辆运动规律,从而预测其未来轨迹。该方法可以提供对未来轨迹的可解释性,但因其无法从车辆历史轨迹数据中挖掘出潜在特征,在实时性、长时预测和复杂交通情况的适应性等方面表现不佳。
2、机器学习以及深度学习技术的发展,使得基于数据驱动的方法在进一步提高轨迹预测效果上有了极大的进展。一般是将车辆的历史轨迹信息如速度、加速度等作为模型输入,通过提取车辆轨迹的时序特征,来对未来轨迹进行输出。然而,车辆的轨迹还与其周围车辆的交互作用有关,不同位置的周围车辆在同一时刻对目标车辆产生的影响不尽相同。另外,周围车辆对目标车辆的交互特征是随着时间动态变化的,不同历史时刻对目标车辆未来轨迹的影响同样存在差异性。
3、目前大部分考虑车辆交互作用的方法,通常用车辆间的相对运动来表征车辆间的交互影响,忽略了周围车辆对目标车辆交互影响的差异性和动态性,对车辆间交互作用特征的提取不全面。
技术实现思路
1、本发明的目的在于克服当前基于交互的预测模型中交互作用特征提取不全面的局限性,提供了一种考虑车辆间动态交互作用的轨迹预测方法,通过构建多车辆间时空关联图,以此作为空间交互特征提取模块的输入,将车辆间的交互作用引入轨迹预测中,并考虑到车辆间交互作用随时间变化的特性,将时间注意力机制与图注意力机制结合嵌入lstm编码器-解码器,提升模型轨迹预测能力。
2、为实现上述目的,本发明所提供的技术方案为:一种考虑车辆间动态交互作用的轨迹预测方法,包括以下步骤:
3、1)获取某一路段上车辆的行驶轨迹数据,包括各时刻车辆的横纵向位置信息、横纵向速度信息、横纵向加速度信息以及车辆行驶方向相对于车道线的角度信息,并对每一车辆提取相同时间长度的行驶轨迹数据,划分为历史时域信息和未来时域信息;
4、2)将每一辆车每一时刻的行驶轨迹数据与其周围本车道前车、本车道后车、左侧车道前车、左侧车道后车、右侧车道前车及右侧车道后车这六辆车在该时刻的行驶轨迹数据进行匹配,作为最终的车辆轨迹特征数据,并将特征数据进行训练集和测试集划分;
5、3)通过训练集的数据对考虑车辆间动态交互作用的轨迹预测模型进行训练;其中,该轨迹预测模型是改进的lstm编码器-解码器结构,其改进点在于:嵌入多头注意力机制来捕捉车辆间的动态交互作用,经过空间交互特征与车辆历史时域轨迹特征的融合,再通过时间注意力机制对不同时刻的车辆信息进行加权融合,得到融合时序特征的上下文向量,最终通过lstm结构预测车辆未来的位置信息;
6、4)将测试集的数据输入训练好的轨迹预测模型中,最终得到车辆未来时域的轨迹信息,即车辆在未来每一时刻的横纵向位置信息。
7、进一步,在步骤1)中,每一车辆的历史时域信息表示为i=1,2,…,n,未来时域信息表示为其中,th为历史时域长度,tg为历史时域与未来时域之间的间隔长度,tf为未来时域长度,在vi中,车辆在历史时域t时刻的轨迹信息表示为t=1,2,...,th,在fi中,车辆在未来时域t'时刻的轨迹信息表示为t'=th+tg,th+tg+1,...,th+tg+tf;其中为车辆i在历史时域t时刻的横向位置,为车辆i在历史时域t时刻的纵向位置,为车辆i在历史时域t时刻的横向速度,为车辆i在历史时域t时刻的纵向速度,为车辆i在历史时域t时刻的横向加速度,为车辆i在历史时域t时刻的纵向加速度,为车辆i在历史时域t时刻的航向角。
8、进一步,所述步骤2)包括以下步骤:
9、2.1)确定目标车辆,根据目标车辆所在车道编号,对目标车辆同一车道以及左右车道的车辆进行分类;
10、2.2)通过每一时刻周围车辆与目标车辆的车头间距值进行前后车的划分,最小的正车头间距即为相应车道前车,最大负车头间距即为相应车道后车;
11、2.3)对每一车辆每一时刻的前后车进行划分并匹配,得到最终的车辆轨迹特征数据,包含各时刻每一车辆与其周围六辆车的横纵向位置信息、横纵向速度信息、横纵向加速度信息以及车辆行驶方向相对于车道线的角度信息。
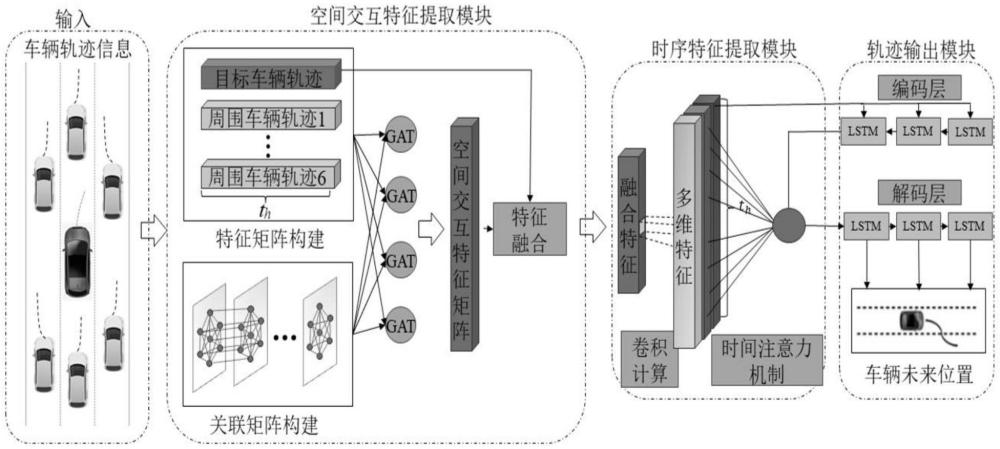
12、进一步,所述步骤3)中,所述轨迹预测模型包括空间交互特征提取模块、时序特征提取模块以及轨迹输出模块,其具体执行以下操作:首先,通过空间交互特征提取模块构建车辆特征矩阵以及关联矩阵,运用多头注意力机制获取周围车辆与目标车辆在每一时刻的空间交互特征矩阵,然后将每一时刻的空间交互特征与目标车辆的历史时域轨迹特征融合作为时序特征提取模块的输入,通过嵌入时间注意力机制的lstm结构获取历史时域每一时刻的权重系数,加权得到历史时域对应的上下文向量,最后,通过轨迹输出模块的lstm编码器对历史信息进行编码并与上述得到的上下文向量进行融合,最终通过lstm解码器输出目标车辆的预测轨迹。
13、进一步,所述空间交互特征提取模块具体执行以下操作:
14、将在时刻t的车辆i视为一个节点各节点间的交互影响则视为带权重的边,权重即为两节点间的交互作用系数,该权重的值范围为[0,1],将每一个节点的特征信息作为变量构建特征矩阵计算如公式(1)所示:
15、
16、对每一条边的权重进行初始化,构建时空关联矩阵a,来表示计算如公式(2)所示:
17、
18、
19、式中:为i1车在t1时刻对应的节点;为i2车在t2时刻对应的节点,i1,i2=0,1,...,6,t1,t2=1,2,...,th-1,th;表示节点和节点之间交互影响作用的初始值,若这两节点存在交互影响,则该初始值为1,否则该初始值为0,这两节点构成的边不参与图注意力网络的运算;为车辆i1在历史时域t1时刻的纵向位置,为车辆i2在历史时域t2时刻的纵向位置;d为车辆间的纵向间距阈值;
20、将上述构建的特征矩阵和时空关联矩阵a作为图注意力网络的输入,经过多头注意力机制计算,输出目标车辆与周围车辆的空间交互特征矩阵,计算如公式(4)、(5)、(6)所示:
21、
22、
23、
24、式中:h为注意力机制头数;和表示对节点和节点的特征矩阵作线性变化,w(h)为可训练的参数矩阵;c(h)为第h头注意力机制的可学习权重矩阵;σ为激活函数,使用leakyrelu非线性激活;为节点的关联节点集合;为第h头注意力机制得到的节点对节点的交互作用系数;为第h头注意力机制输出的节点的空间交互特征矩阵;为空间交互特征提取模块最终输出的节点的空间交互特征矩阵,表达式如公式(7)所示:
25、
26、式中,表示t1时刻i1车周围车辆对i1车产生的交互作用值,i1=0,1,2,…,6,t1=1,2,…th-1,th。
27、进一步,所述时序特征提取模块具体执行以下操作:
28、提取空间交互特征矩阵中周围车辆在t时刻对目标车辆的交互影响作用t=1,2,...,th-1,th,得到目标车辆的空间交互特征参数将其与目标车辆的历史时域信息v0进行融合,得到融合特征为目标车辆在历史时域t时刻的横向位置,为目标车辆在历史时域t时刻的纵向位置,为目标车辆在历史时域t时刻的横向速度,为目标车辆在历史时域t时刻的纵向速度,为目标车辆在历史时域t时刻的横向加速度,为目标车辆在历史时域t时刻的纵向加速度,为目标车辆在历史时域t时刻的航向角,再将t0作为时序特征提取模块的输入,经过时间注意力机制计算,输出关注车辆历史时域每一时刻状态的时序特征向量,具体如下:
29、首先,构建lstm结构,将t0输入该lstm结构获取所有隐藏层信息vh,即:
30、vh,ht=lstm(t0,ht-1) (8)
31、式中,ht为t时刻的隐藏层输出信息,ht-1为t-1时刻的隐藏层输出信息;
32、由于卷积核能够增强网络层的抽象表达能力,因此将vh经过卷积核计算,以实现不同时刻的多维特征提取,即:
33、
34、式中,为经过卷积核计算在时刻t提取的多维特征,p=1,2,…,s;t=1,2,…,th;s为卷积核的大小;为在时刻t的隐藏层信息;k(p)为第p个卷积核;为卷积运算;
35、将经过式(8)计算得到的最后一个隐藏层作为时间注意力机制的查询向量query即q,将每一个卷积层在t时刻的输出同时作为时间注意力机制的关键向量key即k与数值向量value即v,通过q与k之间的点积运算来衡量相似性,从而映射每个时间步长特征对未来轨迹预测的重要性:
36、
37、
38、
39、式中:为历史时域的时间注意力系数信息,其中δ(t)为每一时刻t对应的时间注意力系数,t=1,2,...th;wt为时间注意力机制的可训练权重矩阵;vt为时间注意力系数与每一时刻特征加权计算得到的历史时域的时间注意力特征;v′t为最终经过全连接层运算得到的历史时序特征;w1、w2为网络层可学习权重矩阵。
40、进一步,所述轨迹输出模块具体执行以下操作:
41、将目标车辆的历史时域信息作为lstm编码器输入,获取历史时域隐藏特征与时序特征提取模块获得的v′t融合作为lstm解码器输入,通过全连接层获取最终预测轨迹计算如公式(13)所示:
42、
43、式中,为车辆在th+tg+tf时刻的预测位置,即预测得到的未来时刻t横向位置和纵向位置通过lstm编码器-解码器结构,的计算如公式(14)、(15)所示:
44、he=lstm(v0,he)(14)
45、
46、式中:he、hd分别为lstm编码器和lstm解码器的隐藏层状态;he为lstm编码器输出的历史隐藏特征;w3为网络层可学习权重。
47、本发明与现有技术相比,具有如下优点与有益效果:
48、1、考虑时空动态性的交互特征提取。基于目标车辆与其周围车辆的历史时域轨迹信息,并考虑到车辆间交互作用随时间变化的特性,构建多车辆间的时空关联矩阵,将车辆间的动态交互作用引入轨迹预测中,通过融合时间注意力机制与多头注意力机制的lstm编码器-解码器结构,提高了模型轨迹预测能力。
49、2、考虑周围车辆对目标车辆轨迹预测的差异性影响。由于多头注意力机制构建车辆间的交互影响权重矩阵作为输入,使得轨迹预测模型可以对车辆间的交互影响权重系数进行学习,从而对周围不同位置的车辆分配不同权重,将周围车辆影响的差异性融入模型,提取更全面的交互特征,预测精度有所提高。
- 还没有人留言评论。精彩留言会获得点赞!