一种车辆调度方法、装置及设备与流程
本发明涉及车辆调度,更具体地说,它涉及一种车辆调度方法、装置及设备。
背景技术:
1、传统的调度系统都是强计划性的系统,调度员首先需要制作基本运行图,作为计划模板进行保存,同时每天还要做计划运行图,并且针对每个车次任务进行派班;遇到临时大客流、异常天气、车辆故障等突发因素,需要临时批量修改计划运行图,并且重新派班。
2、在制定车辆任务计划时,根据运营区域内的地图进行规划,但是道路情况存在不确定的变化因素较多,如路面损坏出现凹坑、人类活动产生的障碍物、路面建筑物变形等对车辆行驶造成较大损伤和损耗的路面变化情况,车辆调度过程无法综合考虑这些不确定因素,从而导致在车辆调度期间,车辆损耗增多的情况发生。
技术实现思路
1、本发明的目的就在于为了解决上述问题而提供一种车辆调度方法、装置及设备。
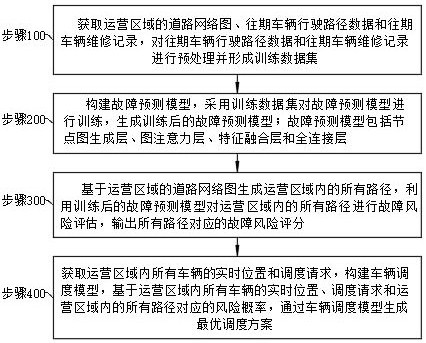
2、本发明提供了一种车辆调度方法,包括以下步骤:
3、步骤100、获取运营区域的道路网络图、往期车辆行驶路径数据和往期车辆维修记录,对往期车辆行驶路径数据和往期车辆维修记录进行预处理并形成训练数据集;
4、步骤200、构建故障预测模型,采用训练数据集对故障预测模型进行训练,生成训练后的故障预测模型;
5、故障预测模型包括节点图生成层、图注意力层、特征融合层和全连接层;
6、节点图生成层用于构建节点图,具体为,将道路网络图表示为无向图,无向图中包含多个节点和边,节点v为道路的交叉点或道路上的设定点,边e为连接两个节点的道路路段;
7、为每个节点、边赋予特征,节点特征包含预处理后的时间戳、经度、纬度、地址、速度、方向角、加速度、方向变化角、是否超速,边特征包括预处理后的两个节点之间的路径长度、道路名称、道路级、限速、时间段、天气;
8、图注意力层用于自动学习节点之间的关系权重,对每个节点i,计算相邻节点j对i的注意力权重系数,然后通过注意力系数对相邻节点特征进行加权求和;
9、特征融合层用于将给定路径中的所有节点的特征进行加权求和;
10、全连接层用于输出每条路径的故障风险评分;
11、步骤300、基于运营区域的道路网络图生成运营区域内的所有路径,利用训练后的故障预测模型对运营区域内的所有路径进行故障风险评估,输出所有路径对应的故障风险评分;
12、步骤400、获取运营区域内所有车辆的实时位置和调度请求,构建车辆调度模型,基于运营区域内所有车辆的实时位置、调度请求和运营区域内的所有路径对应的风险概率,通过车辆调度模型生成最优调度方案。
13、作为本发明的进一步优化方案,所述往期车辆行驶路径数据包括gps轨迹数据、行车路线信息和路况信息;
14、gps轨迹数据包括车辆id、时间戳、经度、纬度、速度、方向角;
15、行车路线信息包括起点、终点、出发时间、到达时间;
16、路况信息包括道路名称、道路级、道路限速、时间段、天气状况;
17、往期车辆维修记录包括维修信息、故障发生位置;
18、维修记录基本信息包括车辆id、维修日期、维修类型、维修费用、是否影响行车。
19、作为本发明的进一步优化方案,所述对往期车辆行驶路径数据和往期车辆维修记录进行预处理并形成训练数据集,具体包括以下步骤:
20、数据清洗,包括处理缺失值、去除重复数据、识别和处理异常值;
21、数据标准化,对数值型特征进行归一化或标准化;
22、特征提取,基于经过数据清洗和数据标准化后的往期车辆行驶路径数据和往期车辆维修记录数据,计算衍生特征,并构建复合特征;
23、数据融合,将经过数据清洗和数据标准化后的往期车辆行驶路径数据、往期车辆维修记录数据以及复合特征合并,构建每一段行车路径对应的特征集。
24、作为本发明的进一步优化方案,图注意力层的计算公式为:;其中,表示节点j对节点i的注意力权重系数,表示可学习的注意力参数,表示转置,leakyrelu表示leakyrelu激活函数,表示向量拼接操作,表示l层的权重矩阵,表示第l-1层的节点i的节点特征向量,表示第l-1层的节点j的节点特征向量;
25、第l层的节点i的节点更新公式为:;其中,表示激活函数,表示与第i个顶点直接连接的顶点的集合。
26、作为本发明的进一步优化方案,特征融合层用于将给定路径中的所有节点的特征进行加权求和,给定路径为,计算公式为:;其中,为距离衰减加权系数,表示更新后的节点的节点特征向量。
27、作为本发明的进一步优化方案,全连接层的计算公式为:;其中,表示路径p的故障风险评分,表示全连接层的权重矩阵,表示全连接层的偏置参数,表示全连接层的激活函数。
28、作为本发明的进一步优化方案,获取运营区域内所有车辆的实时位置和调度请求,构建车辆调度模型,基于运营区域内所有车辆的实时位置、调度请求和运营区域内的所有路径对应的风险概率,通过车辆调度模型生成最优调度方案;
29、具体为:
30、构建调度问题模型:
31、将道路网络表示为图g=(v,e),节点v为道路交叉点或道路上的设定点,边e为道路路段,分为安全边和危险边两种,每个车辆有起点s和目标点t,给定车辆当前位置和调度请求;
32、边e为道路路段,分为安全边和危险边两种,具体判定过程为,设置风险阈值,对于的路径p,标记为高风险路径,对于的路径p,标记为安全路径,的缺省值为0.5;
33、设定决策变量::0/1变量,表示车辆k是否被指派从起点s运往终点t;:0/1变量,表示车辆k从起点s到终点t是否经过路径p;
34、设定目标函数:;其中,h表示车辆k从起点s到终点t经过的所有路径,为路径p的故障风险评分;
35、设定约束条件:
36、对每个调度请求,至少派出一辆车;
37、每辆车只有一个终点;
38、每个终点至少被一辆车服务;
39、被派出的车只能选择一条路径;
40、高风险路径不被使用;
41、构造解空间:
42、假设存在n个可调度车辆,初始各自分布在s点;
43、对每个车辆k,按照转移概率,从当前节点i选择下一个节点j;
44、所有车辆构造完路径后,按照路径长度、时间更新每条边的信息素;
45、若满足最大迭代次数或收敛条件,输出最优解,否则返回并进行下一轮迭代。
46、作为本发明的进一步优化方案,转移概率计算公式为:;其中,表示启发值,表示信息素浓度,表示指数信息素因子,β表示启发函数因子,表示车辆k未访问过的节点的集合;
47、启发值的计算公式为:;其中,是节点i和节点j之间的距离;
48、信息素浓度计算公式为:;其中,ρ是信息素挥发率,是本次迭代中所有车辆在边(i,j)上留下的新增信息素量;
49、新增信息素量计算公式为:;其中,q是一个常数,是车辆k在第t次迭代中走过的路径长度。
50、一种车辆调度装置,其用于执行如上述的车辆调度方法,包括:
51、数据获取模块,用于获取运营区域的道路网络图、往期车辆行驶路径数据和往期车辆维修记录,对往期车辆行驶路径数据和往期车辆维修记录进行预处理并形成训练数据集;
52、数据处理模块,用于构建故障预测模型,采用训练数据集对故障预测模型进行训练,生成训练后的故障预测模型;
53、故障预测模块,基于运营区域的道路网络图生成运营区域内的所有路径,利用训练后的故障预测模型对运营区域内的所有路径进行故障风险评估,输出所有路径对应的故障风险评分;
54、调度方案生成模块,用于获取运营区域内所有车辆的实时位置和调度请求,构建车辆调度模型,基于运营区域内所有车辆的实时位置、调度请求和运营区域内的所有路径对应的风险概率,通过车辆调度模型生成最优调度方案。
55、一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的车辆调度方法。
56、本发明的有益效果在于:本发明可以充分利用历史数据,精确评估路径风险,并在调度过程中主动规避危险路径,从而减少车辆损耗,提高运营效率和安全性,且可以通过新采集的数据实时对模型进行训练和修正,可随着时间变化来实时判断各路段的变化情况以及预测路段对车辆所造成的损耗概率,可有效的降低调度方案实际实施时,车辆的损耗率和故障率,降低运营商的经济损失。
- 还没有人留言评论。精彩留言会获得点赞!