停车场诱导屏的车位复查方法以及系统与流程
本发明涉及停车场诱导屏的车位复查系统,尤其涉及一种停车场诱导屏的车位复查方法以及系统。
背景技术:
1、随着科技的发展,地下停车场作为车库,并容纳多个车辆,多个车辆分别停靠于对应的车位,针对车位,车位的底部设有地磁,采用地磁对车辆进行感应,以便于根据地磁的感应信号定义车位的空闲状态或者不空闲状态,在现有技术中,地磁的数量与车位的数量需要相同,每一个车位中具有一个地磁,地磁的感应范围有限,并无法针对各个层级的停车情况进行把控,无法保证各个层级的车位情况的准确性。
技术实现思路
1、本发明的目的在于克服现有技术的不足,本发明提供了一种停车场诱导屏的车位复查方法以及系统,根据毫米波雷达的探测而定义各个层级的层级信号,并针对各个层级的层级信号定义各个层级的停车情况,以便于基于对应的层级的管控系统进行层级管控,从而基于各个层级进行精细化管控,基于车位布置风格匹配车位复查机制;将各个层级的层级信号以及复查信号进行对比,并定义车位差异部分,针对车位差异部分进行数据追溯,以定义多个异常因素,并形成异常因素集合;将异常因素集合反馈至毫米波雷达以及停车场诱导屏,并基于异常因素集合训练毫米波雷达以及停车场诱导屏,保证了毫米波雷达、停车场诱导屏对各个层级的车位情况的准确性。
2、为了解决上述技术问题,本发明实施例提供了一种停车场诱导屏的车位复查方法,应用于停车场诱导屏的车位复查场景;
3、所述停车场诱导屏的车位复查方法,包括:
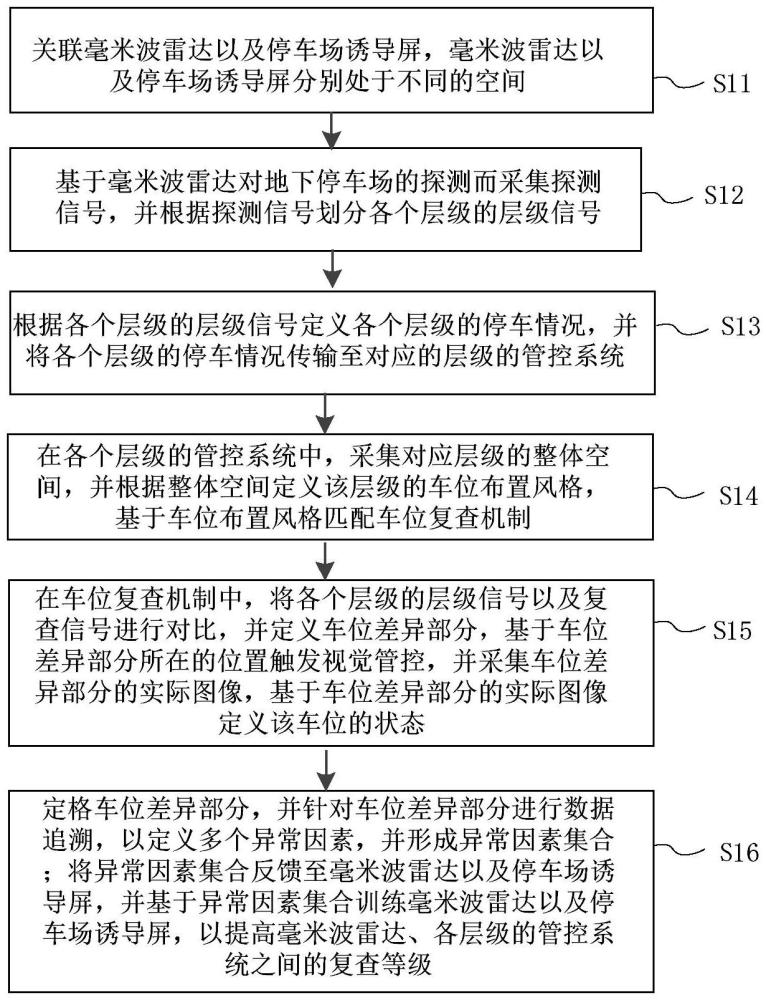
4、关联毫米波雷达以及停车场诱导屏,毫米波雷达以及停车场诱导屏分别处于不同的空间;
5、基于毫米波雷达对地下停车场的探测而采集探测信号,并根据探测信号划分各个层级的层级信号;
6、根据各个层级的层级信号定义各个层级的停车情况,并将各个层级的停车情况传输至对应的层级的管控系统;
7、在各个层级的管控系统中,采集对应层级的整体空间,并根据整体空间定义该层级的车位布置风格,基于车位布置风格匹配车位复查机制;
8、在车位复查机制中,将各个层级的层级信号以及复查信号进行对比,并定义车位差异部分,基于车位差异部分所在的位置触发视觉管控,并采集车位差异部分的实际图像,基于车位差异部分的实际图像定义该车位的状态;
9、定格车位差异部分,并针对车位差异部分进行数据追溯,以定义多个异常因素,并形成异常因素集合;将异常因素集合反馈至毫米波雷达以及停车场诱导屏,并基于异常因素集合训练毫米波雷达以及停车场诱导屏,以提高毫米波雷达、各层级的管控系统之间的复查等级。
10、可选的,所述关联毫米波雷达以及停车场诱导屏,毫米波雷达以及停车场诱导屏分别处于不同的空间,包括:
11、定位毫米波雷达以及停车场诱导屏;
12、采集毫米波雷达所在的位置以及停车场诱导屏所在的位置;
13、基于毫米波雷达所在的位置以及停车场诱导屏所在的位置构建整体空间;
14、根据整体空间划分多个空间,同时,毫米波雷达以及停车场诱导屏分别处于不同的空间;
15、基于毫米波雷达所在的位置以及停车场诱导屏所在的位置定义相对距离;
16、根据相对距离定义距离等级,并基于距离等级匹配通讯模式;
17、在该通讯模式下,将毫米波雷达以及停车场诱导屏进行通讯交互,并关联毫米波雷达以及停车场诱导屏。
18、可选的,所述基于毫米波雷达对地下停车场的探测而采集探测信号,并根据探测信号划分各个层级的层级信号,包括:
19、采集毫米波雷达的多个工作参数,多个工作参数为不同方向的参数;
20、基于多个工作参数定义毫米波雷达的状态;
21、采集地下停车场的当前时间段,并基于地下停车场的当前时间段确定时间类型;
22、若时间类型为繁忙时间,则根据繁忙时间匹配毫米波雷达的工作状态,并在该工作状态中标记对应繁忙时间的探测等级;
23、在该探测等级中,根据毫米波雷达对地下停车场的探测而采集探测信号;
24、定格探测信号;
25、基于探测信号的信号解析而定义地下停车场的整体信息;
26、根据地下停车场的整体信息进行信息筛选,并定义各个层级的信息集合;
27、基于各个层级的信息集合构建对应的各个层级的层级信号,并完成探测信号的划分。
28、可选的,所述根据各个层级的层级信号定义各个层级的停车情况,并将各个层级的停车情况传输至对应的层级的管控系统,包括:
29、定格各个层级的层级信号;
30、基于各个层级的层级信号匹配各个层级的分布图;
31、根据分布图定位各个车辆的标记,并基于该分布图呈现对应层级的停车情况,以定义各个层级的停车情况;此时,基于毫米波雷达限定对应的层级毫米波,并针对层级毫米波在对应层级进行遍历,以在该层级中的车辆进行毫米波的反射,从而通过反射标记确定车辆的标记,并基于反射标记以及毫米波雷达之间的距离定义车辆的位置;
32、关联毫米波雷达以及层级的管控系统,并将各个层级的停车情况传输至对应的层级的管控系统。
33、可选的,所述在各个层级的管控系统中,采集对应层级的整体空间,并根据整体空间定义该层级的车位布置风格,基于车位布置风格匹配车位复查机制,包括:
34、在各个层级的管控系统中,基于管控系统进行层级探测,并定义对应层级的整体空间;
35、采集对应层级的整体空间,并将对应层级的整体空间以及对应的分布图进行关联;
36、基于对应层级的整体空间以及对应的分布图构建层级车辆示意图;
37、根据层级车辆示意图以及对应的层级空间内车辆的移动轨迹,构建车辆的动态跟踪轨迹,并基于车辆脱离停车位的时刻触发层级车辆示意图中车辆停留位置的自动式更新;
38、基于层级车辆示意图定义该层级的车位布置风格;
39、根据该层级的车位布置风格定义空闲车位的数量以及多个空闲车位之间的相对距离;
40、基于空闲车位的数量以及多个空闲车位之间的相对距离匹配车位复查机制。
41、可选的,所述在车位复查机制中,将各个层级的层级信号以及复查信号进行对比,并定义车位差异部分,基于车位差异部分所在的位置触发视觉管控,并采集车位差异部分的实际图像,基于车位差异部分的实际图像定义该车位的状态,包括:
42、在车位复查机制中,定格各个层级的层级信号以及复查信号;
43、基于各个层级的层级信号匹配记录中的层级车辆示意图,基于复查信号匹配当前的层级车辆示意图;
44、将各个层级的层级信号以及复查信号进行对比,并关联记录中的层级车辆示意图以及当前的层级车辆示意图;
45、基于记录中的层级车辆示意图以及当前的层级车辆示意图触发图像对比,并定义车位差异部分。
46、可选的,所述在车位复查机制中,将各个层级的层级信号以及复查信号进行对比,并定义车位差异部分,基于车位差异部分所在的位置触发视觉管控,并采集车位差异部分的实际图像,基于车位差异部分的实际图像定义该车位的状态,还包括:
47、定格车位差异部分,并查询车位差异部分所在的位置,基于车位差异部分所在的位置定位处于周边的摄像头,并触发处于周边的摄像头的工作以及视觉管控;
48、在周边的摄像头的工作过程中,沿着车位差异部分进行环形拍摄,以输出多个视觉图像;根据多个视觉图像构建车位差异部分的实际图像;
49、根据车位差异部分的实际图像定义该车位的状态,从而将该车位的状态优化记录中的层级车辆示意图以及当前的层级车辆示意图,以保证优化后的记录中的层级车辆示意图以及当前的层级车辆示意图的一致性。
50、可选的,所述定格车位差异部分,并针对车位差异部分进行数据追溯,以定义多个异常因素,并形成异常因素集合;将异常因素集合反馈至毫米波雷达以及停车场诱导屏,并基于异常因素集合训练毫米波雷达以及停车场诱导屏,以提高毫米波雷达、各层级的管控系统之间的复查等级,包括:
51、定格车位差异部分;
52、基于车位差异部分触发数据追溯,并输出以往数据;
53、遍历以往数据,并根据以往数据的遍历结果定义多个异常因素;
54、基于多个异常因素形成异常因素集合;
55、关联毫米波雷达以及停车场诱导屏,并将异常因素集合同步反馈至毫米波雷达以及停车场诱导屏。
56、可选的,所述定格车位差异部分,并针对车位差异部分进行数据追溯,以定义多个异常因素,并形成异常因素集合;将异常因素集合反馈至毫米波雷达以及停车场诱导屏,并基于异常因素集合训练毫米波雷达以及停车场诱导屏,以提高毫米波雷达、各层级的管控系统之间的复查等级,还包括:
57、基于异常因素集合触发至毫米波雷达的车位排查训练,并根据异常因素集合触发停车场诱导屏的复查训练;
58、毫米波雷达根据异常因素集合而逐步优化各个层级的车位排查逻辑以及进出车逻辑;
59、停车场诱导屏根据异常因素集合扩展复查方式;
60、基于车位排查逻辑、进出车逻辑以及复查方式构建复查体系,并在该复查体系中针对毫米波雷达、停车场诱导屏、摄像头进行动态关联。
61、另外,本发明实施例还提供了一种停车场诱导屏的车位复查系统,所述停车场诱导屏的车位复查系统包括:
62、关联模块,用于关联毫米波雷达以及停车场诱导屏,毫米波雷达以及停车场诱导屏分别处于不同的空间;
63、层级信号模块,用于基于毫米波雷达对地下停车场的探测而采集探测信号,并根据探测信号划分各个层级的层级信号;
64、管控模块,用于根据各个层级的层级信号定义各个层级的停车情况,并将各个层级的停车情况传输至对应的层级的管控系统;
65、复查机制模块,用于在各个层级的管控系统中,采集对应层级的整体空间,并根据整体空间定义该层级的车位布置风格,基于车位布置风格匹配车位复查机制;
66、车位状态模块,用于在车位复查机制中,将各个层级的层级信号以及复查信号进行对比,并定义车位差异部分,基于车位差异部分所在的位置触发视觉管控,并采集车位差异部分的实际图像,基于车位差异部分的实际图像定义该车位的状态;
67、训练模块,用于定格车位差异部分,并针对车位差异部分进行数据追溯,以定义多个异常因素,并形成异常因素集合;将异常因素集合反馈至毫米波雷达以及停车场诱导屏,并基于异常因素集合训练毫米波雷达以及停车场诱导屏,以提高毫米波雷达、各层级的管控系统之间的复查等级。
68、在本发明实施例中,通过本发明实施例中的方法,关联毫米波雷达以及停车场诱导屏,毫米波雷达以及停车场诱导屏分别处于不同的空间;基于毫米波雷达对地下停车场的探测而采集探测信号,并根据探测信号划分各个层级的层级信号;根据各个层级的层级信号定义各个层级的停车情况,并将各个层级的停车情况传输至对应的层级的管控系统,以便于根据毫米波雷达的探测而定义各个层级的层级信号,并针对各个层级的层级信号定义各个层级的停车情况,以便于基于对应的层级的管控系统进行层级管控,从而基于各个层级进行精细化管控,同时,在各个层级的管控系统中,采集对应层级的整体空间,并根据整体空间定义该层级的车位布置风格,基于车位布置风格匹配车位复查机制;在车位复查机制中,将各个层级的层级信号以及复查信号进行对比,并定义车位差异部分,基于车位差异部分所在的位置触发视觉管控,并采集车位差异部分的实际图像,基于车位差异部分的实际图像定义该车位的状态;定格车位差异部分,并针对车位差异部分进行数据追溯,以定义多个异常因素,并形成异常因素集合;将异常因素集合反馈至毫米波雷达以及停车场诱导屏,并基于异常因素集合训练毫米波雷达以及停车场诱导屏,以提高毫米波雷达、各层级的管控系统之间的复查等级,保证了毫米波雷达、停车场诱导屏对各个层级的车位情况的准确性。
- 还没有人留言评论。精彩留言会获得点赞!