一种畸形交叉口车辆运行轨迹建模方法
本发明涉及道路交叉口车辆通行控制,具体涉及一种畸形交叉口车辆运行轨迹建模方法。
背景技术:
1、道路平面交叉口由两条或两条以上的道路相交而成,是城市路网中车辆、行人转向和疏散的重要节点。在城市路网中,最普遍最常见的是十字交叉口,这种交叉口不仅通行效率高而且有利于交通组织和交通管理。但是在城市道路不断增加过程中,受地形、建筑等多种客观因素的影响,产生了大量多路交叉口或非正规十字或t型交叉口,即畸形交叉口。
2、畸形交叉口自身存在交叉口面积大、线形不流畅、车流冲突点多等问题,使交叉口交通组织困难,且不易进行管理,通行效率低下,易产生交通拥堵,甚至发生交通事故,同时也会影响到整个交通路网的畅通性。但是,若强行通过改变道路线形将畸形交叉口改造为规则的十字型交叉口,可能会产生建筑物拆迁、植被破坏等问题,不仅产生大量人力、物力、财力的投入,同时也会影响附近居民的正常生活以及道路交通的正常运行。
3、随着城市道路交叉口精细化管理的不断推进,一些遗留的畸形交叉口成为交通管理的一大难题,这些畸形交叉口往往不是东西方向和南北方向道路相交而成,包含一条或多条倾斜走向的道路,且进口道和出口道数量不对称。因此,难以对畸形交叉口内车辆的运行轨迹进行规范化建模,从而更难对其进行精细化管理和控制。
技术实现思路
1、基于上述背景技术所提出的问题,本发明的目的在于提供一种畸形交叉口车辆运行轨迹建模方法,将畸形交叉口规则化表述,以解决畸形交叉口内车流交织混乱问题,降低畸形交叉口对交通通行的影响,提高畸形交叉口的通行效率。
2、本发明通过下述技术方案实现:
3、本发明第一方面提供了一种畸形交叉口车辆运行轨迹建模方法,包括如下步骤:
4、步骤1:获取畸形交叉口各方向上进口道和出口道的几何信息和车道信息,基于进口道和出口道的几何信息和车道信息分别建立对应方向上的平面直角坐标系;
5、步骤2:在对应方向上的平面直角坐标系中确定对应方向上进口车道边界线方程和出口车道边界线方程;
6、步骤3:将畸形交叉口所有方向上的平面直角坐标系进行归一化处理,生成归一化平面直角坐标系;
7、步骤4:基于所述归一化平面直角坐标系建立由进口车道i驶向出口车道j的车辆运行轨迹方程。
8、在上述技术方案中,由于畸形交叉口往往不是东西方向和南北方向道路相交而成,包含一条或多条倾斜走向的道路,且进口道和出口道数量不对称,难以对畸形交叉口内车辆的运行轨迹进行规范化建模。本发明利用步骤1分别为各个方向上的交叉口建立一个平面直角坐标系,并通过步骤2对车辆行驶过程中的进口车道以及其所对应的出口车道的边界进行约束,再通过步骤3将步骤1至步骤2所建立的包含有车道边界约束的平面直角坐标系进行归一化处理,将出口道的平面直角坐标系归一化至进口道的平面直角坐标系,从而得到归一化平面直角坐标系,该归一化平面直角坐标系可以同时用于表征出口道与进口道,进而为畸形交叉口内车辆运行轨迹的规范化建模提供了与畸形交叉口相匹配的坐标系,有利于正确进行畸形交叉口内车辆运行轨迹建模。
9、在步骤1至步骤3所构建的归一化平面直角坐标系中利用畸形交叉口的几何特征、结构特征对车辆由进口车道i驶向其对应的出口车道j的行驶轨迹进行分析,以直行和圆周运动为组合将畸形交叉口内车辆运行轨迹进行规范化建模,可以适用于任何几何条件的平面交叉口。进而解决了畸形交叉口内车流交织混乱问题,降低畸形交叉口对交通通行的影响,提高畸形交叉口的通行效率。
10、在一种可选的实施例中,所述步骤1包括如下步骤:
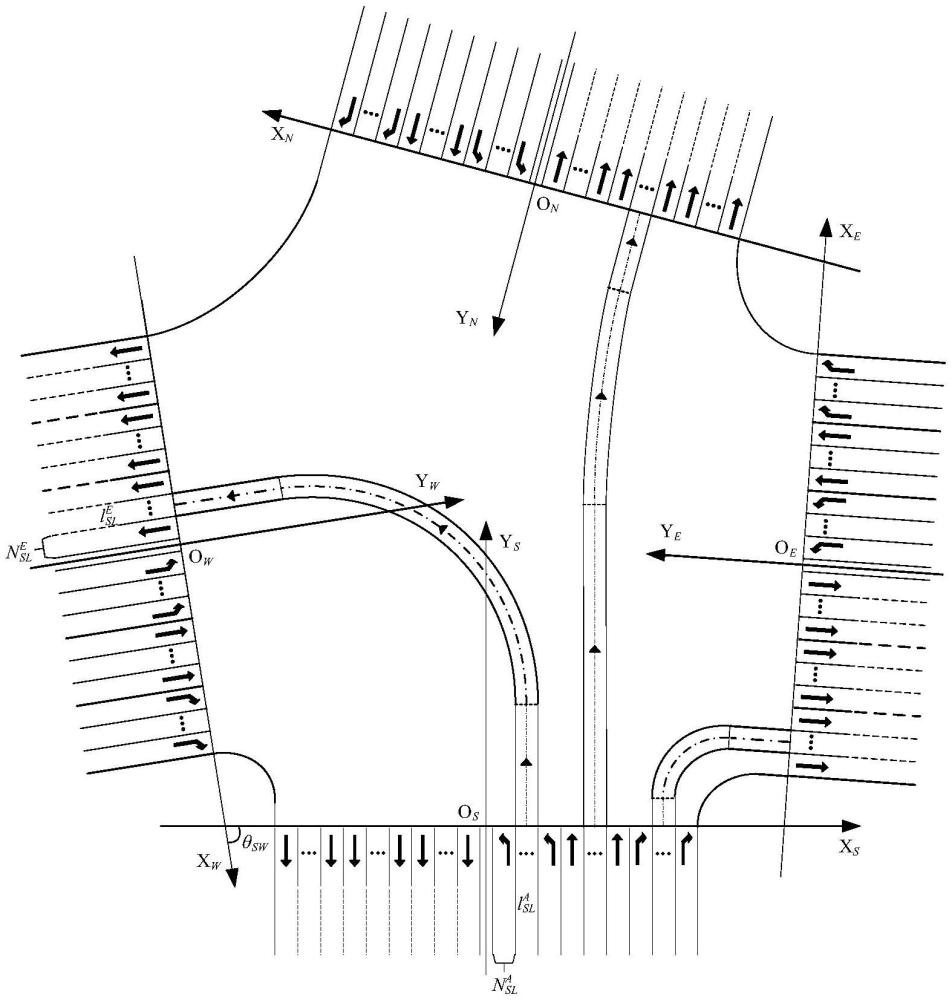
11、获取d方向上进口道和出口道的几何信息和车道信息;其中,以dv表示机动车道的宽度,以dg表示交叉口中央隔离带的宽度,以表示d方向进口车道i与交叉口中央隔离带之间的间隔车道数量,以表示d方向进口车道i对应的出口车道j与交叉口中央隔离带之间的间隔车道数量;
12、以畸形交叉口d方向进口道与出口道之间的中间线顶点为原点,以过原点与车道平行的直线为y轴,建立d方向上的平面直角坐标系;其中,d方向上的平面直角坐标系包括坐标系xda-oda-yda和坐标系xde-ode-yde。
13、在一种可选的实施例中,所述步骤2中在d方向上的平面直角坐标系中确定d方向上进口车道边界线方程和出口车道边界线方程包括如下步骤:
14、在所述坐标系xda-oda-yda中,分别建立d方向进口车道i的左边界线方程和d方向进口车道i的右边界线方程;其中,
15、d方向进口车道i的左边界线方程表示如下:
16、
17、其中,表示d方向进口车道i的左边界线方程的x值;
18、d方向进口车道i的右边界线方程表示如下:
19、
20、其中,表示d方向进口车道i的右边界线方程的x值;
21、在所述坐标系xde-ode-yde中,分别建立d方向进口车道i对应的出口车道j的左边界线方程和d方向进口车道i对应的出口车道j的右边界线;其中,
22、d方向进口车道i对应的出口车道j的左边界线方程表示如下:
23、
24、其中,表示d方向进口车道i对应的出口车道j的左边界线方程的x值;
25、d方向进口车道i对应的出口车道j的右边界线方程表示如下:
26、
27、其中,表示d方向进口车道i对应的出口车道j的右边界方程的x值。
28、在一种可选的实施例中,所述步骤3包括如下步骤:
29、步骤31:从所述坐标系xde-ode-yde中任取一点p(xde,yde),根据移轴公式和转轴公式计算点p(xde,yde)在所述中坐标系xda-oda-yda中的坐标(xda,yda),并得到转换公式;其中,所述转换公式表示如下:
30、
31、其中,(xe0,ye0)表示点ode在坐标系xda-oda-yda中的坐标,θae表示坐标轴xda与坐标轴xde之间按逆时针方向旋转的夹角;
32、步骤32:利用所述转换公式将坐标系xde-ode-yde中d方向进口车道i对应的出口车道j的左边界线方程和d方向进口车道i对应的出口车道j的右边界线方程转化至坐标系xda-oda-yda中。
33、在一种可选的实施例中,所述步骤32中,利用所述转换公式将坐标系xde-ode-yde中d方向进口车道i对应的出口车道j的左边界线方程转化至坐标系xda-oda-yda中:
34、
35、其中,表示坐标系xda-oda-yda中d方向进口车道i对应的出口车道j的左边界线方程;
36、利用所述转换公式将坐标系xde-ode-yde中d方向进口车道i对应的出口车道j的右边界线方程转化至坐标系xda-oda-yda中:
37、
38、其中,表示坐标系xda-oda-yda中d方向进口车道i对应的出口车道j的右边界线方程。
39、在一种可选的实施例中,所述步骤4包括如下步骤:
40、步骤41:在坐标系xda-oda-yda中设置车辆驶入点pai(xai,0)和车辆驶出点pej(xej,yej),计算从车辆驶入点pai至车辆驶出点pej的运行轨迹中心线方程fdm;
41、步骤42:计算车辆运行轨迹的左边界线方程fdl和右边界线方程fdr,分别建立运行轨迹中心线方程fdm与左边界线方程fdl、右边界线方程fdr的关联关系,生成车辆运行轨迹方程。
42、在一种可选的实施例中,所述步骤41包括如下步骤:
43、计算车辆驶入点pai对应的车道中心线lai以及车道中心线lai的垂线方程lai┴;
44、计算车辆驶出点pej对应的车道中心线lej以及车道中心线lej的垂线方程lej┴;
45、确定车道中心线lai与车道中心线lej的交点oae(x0,y0)、车道中心线lai与垂线方程lai┴交点车道中心线lej与垂线方程lej┴的交点垂线方程lai┴与垂线方程lej┴的交点
46、利用车辆驶入点pai、车辆驶出点pej、交点oae、交点交点交点分段建立运行轨迹中心线方程fdm。
47、在一种可选的实施例中,分段建立运行轨迹中心线方程fdm包括:
48、计算交点与交点之间的距离计算交点与交点之间的距离
49、以rv表示车辆的最优转弯半径,令距离与距离均等于车辆的最优转弯半径rv;
50、构建约束式,将距离与距离带入所述约束式中,得到运行轨迹构建条件,对所述运行轨迹构建条件进行判定,依据判定结果分段建立运行轨迹中心线方程fdm。
51、在一种可选的实施例中,所述运行轨迹中心线方程fdm包括三个区段行驶轨迹;
52、其中,利用车道中心线lai和交点构建区段的行驶轨迹方程;
53、依据判定结果分别建立区段和区段的行驶轨迹方程。
54、在一种可选的实施例中,依据判定结果分别建立区段和区段的行驶轨迹方程:
55、确定运行轨迹构建条件中kej≠0时交点交点交点的交点坐标以及车道中心线lej的中心线方程;
56、利用kej≠0时的交点交点与交点的交点坐标构建区段的行驶轨迹方程;
57、利用kej≠0时的车道中心线lej的中心线方程和交点的交点坐标构建区段的行驶轨迹方程;
58、确定运行轨迹构建条件中kej=0时交点交点交点的交点坐标以及车道中心线lej的中心线方程;
59、利用kej=0时的交点交点与交点的交点坐标构建区段的行驶轨迹方程;
60、利用kej=0时的车道中心线lej的中心线方程和交点的交点坐标构建区段的行驶轨迹方程。
61、本发明与现有技术相比,具有如下的优点和有益效果:
62、本发明以直行和圆周运动为组合将畸形交叉口内车辆运行轨迹进行规范化建模,可以适用于任何几何条件的平面交叉口,且对交叉口运行车辆所在的进口道和出口道没有限制,适用性广泛,有助于对交叉口车辆运行安全和通行效率进行精细化管理和控制。
- 还没有人留言评论。精彩留言会获得点赞!