一种低能见度环境下的公路通行管控方法及系统与流程
本发明涉及智能交通领域,尤其涉及一种低能见度环境下的公路通行管控方法及系统。
背景技术:
1、随着交通网络的不断扩展和车辆数量的持续增长,公路交通安全问题日益受到社会各界的关注。其中,低能见度环境,如大雾、雨雪等恶劣天气条件,对公路通行安全构成了威胁。特别是在低能见度环境下,驾驶员的视线受限,反应时间延长,极易发生追尾、偏离车道等事故。
2、目前,限速和限行措施会影响公路的通行效率,增加交通拥堵的风险;而警示标志的设置虽然能在一定程度上提醒驾驶员注意安全,但在能见度极低的情况下,驾驶员可能无法及时发现警示标志,导致事故的发生。国内外在低能见度环境下公路通行管控方面的研究已取得了一些进展。
3、然而,现有技术仍存在一些不足之处。一方面,大多数技术主要关注于对交通状态的监测和预警,而缺乏对交通管控的深入研究;另一方面,现有技术在应用过程中可能受到硬件设备的限制,如传感器精度不足、数据处理能力有限等,导致监控效果不佳。因此,寇待开发一种更为有效、智能的低能见度环境下公路通行管控方法,提高公路的通行效率和安全性。
技术实现思路
1、本发明的目的是要提供一种低能见度环境下的公路通行管控方法。
2、为达到上述目的,本发明是按照以下技术方案实施的:
3、本发明包括以下步骤:
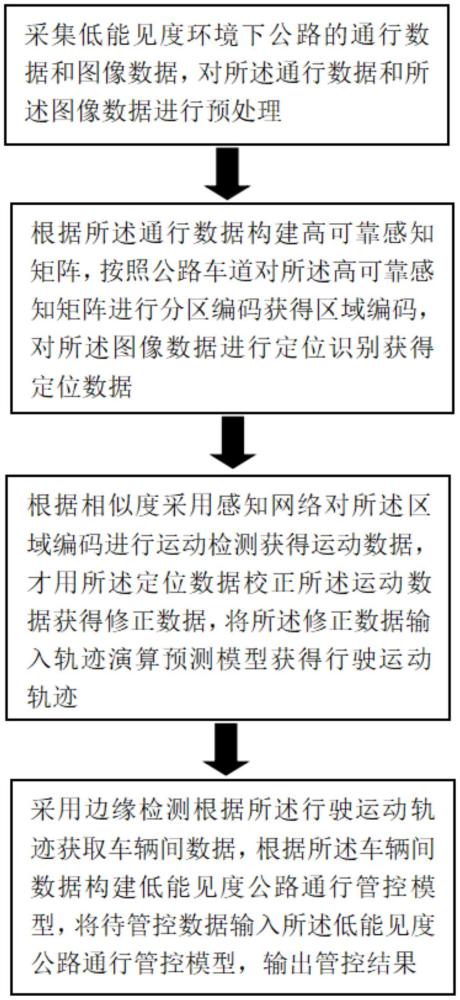
4、采集低能见度环境下公路的通行数据和图像数据,对所述通行数据和所述图像数据进行预处理;
5、根据所述通行数据构建高可靠感知矩阵,按照公路车道对所述高可靠感知矩阵进行分区编码获得区域编码,对所述图像数据进行定位识别获得定位数据;
6、根据相似度采用感知网络对所述区域编码进行运动检测获得运动数据,才用所述定位数据校正所述运动数据获得修正数据,将所述修正数据输入轨迹演算预测模型获得行驶运动轨迹;包括:
7、
8、其中第s个运动数据的感应角度为θs,定位数据的数量为第s个定位数据的实测角度为θo,第s个运动数据为ks,第s个影响因子为第t个时刻的第s个运动数据为ks,t,第t+1个时刻的第s个运动数据为ks,t+1,观测时刻上限为t,第s个偏差权重为δs,第s个定位数据为ls,第s个修正数据为ζs,调控因子为ε;
9、采用边缘检测根据所述行驶运动轨迹获取车辆间数据,根据所述车辆间数据构建低能见度公路通行管控模型,将待管控数据输入所述低能见度公路通行管控模型,输出管控结果。
10、进一步的,按照公路车道对所述高可靠感知矩阵进行分区编码获得区域编码的方法,包括:
11、通过公路上的传感器位置将高可靠感知矩阵划分为多个感知区域;
12、计算感知区域与编码数据的差错概率上限:
13、
14、其中信道矩阵为r,预编码矩阵为k,差错概率为h(·),感知区域为c,感知区域的编码数据为误差率为η,范数函数为‖·‖;
15、计算信道概率密度:
16、
17、其中信道r的概率密度为信道均值为rτ,传输协方差为vt,传输逆矩阵为v-1,矩阵的秩为tr[·],信道矢量数量为n,行列式为dt(·),第f个信号矢量的数量为nf;
18、计算最小目标函数:
19、
20、tr(kkr)=1
21、其中目标函数为传输协方差的逆矩阵为显著性权重为λ,信道r的预编码矩阵为kr,预编码矩阵最优时矩阵的码距为μo;
22、计算显著性权重:
23、
24、其中显著常数分别为l,自然常数为e,当前编码图像的平均显著性为第v个编码区域uv的平均显著性为k(uv);
25、给出约束目标函数,表达式为:
26、
27、其中拉格朗日系数为信道调整矩阵z和拉格朗日系数的约束目标函数为预编码矩阵为
28、计算最优编码矩阵:
29、
30、其中最优编码矩阵为ko,调整参数为右奇异向量为x,左奇异向量为y,根据最优编码矩阵输出区域编码。
31、进一步的,根据相似度采用感知网络对所述区域编码进行运动检测获得运动数据的方法,包括:
32、根据编码区域获得区域图像,采用卷积神经网络提取区域图像的时变特征;
33、将时变特征输入感知网络,对输入的特征层通道进行全局平均化处理,将空间特征信息压缩到通道维度中,表达式为:
34、
35、其中第a个统计量为区域图像的高度为s,区域图像的宽度为d,第a个特征图层为ea,第c个高度第y个宽度的特征图当前位置数值为(c,y);
36、通过两次全连接操作拟合通道间的相关性,根据相关性确定通道重要程度,表达式为:
37、
38、其中区域图像的缩放参数为β,区域图像的平移参数为r1,输出权重为ψ,自然常数为e,偏移量为δ;
39、对感知网络进行剪枝操作,表达式为:
40、
41、其中第a个批量标准层的输出为第a个批量标准层的输入为va,位移为缩放因子为ρ,训练数据最小批次的均值为训练数据最小批次的方差为σw,误差因子为τ;
42、改进感知网络的损失函数,表达式为:
43、
44、其中正则系数为α,在第b个网络层的特征表示为在第b个网络层的预测特征表示为位移的约束函数为
45、通过感知网络进行运动目标标注,计算运动目标的相似度:
46、
47、其中余弦权重为χ2,外形权重为χ1,余弦函数为cos(·),第p个运动目标的第i个外形特征为zp,i,第p个运动目标外形特征zp,i的对照车辆外形特征为zp,o,调节因子为φ,影响程度为外形特征的数量为
48、将相似度大于0.718的运动目标作为行驶车辆,提取行驶车辆的运动数据输出为运动数据。
49、进一步的,将所述修正数据输入轨迹演算预测模型获得行驶运动轨迹的方法,包括:
50、采用通过从修正数据中学习动态模型和统计行为模式,引入基于谱聚类的驾驶模式聚类机制,通过时空注意力机制获得影响轨迹的特征权重分布,根据动态模型、行为模式和特征权重分布预测车辆的行驶运动轨迹。
51、进一步的,采用边缘检测根据所述行驶运动轨迹获取车辆间数据的方法,包括:
52、根据行驶运动轨迹获取图像,表达式为:
53、
54、其中图像的像素坐标为(w,j),灰度图像为g(w,j),卷积运算符为*,高斯分布的标准差为ξ,偏差常数为控制因子为ω,图像像素的横坐标为w,图像像素的纵坐标为j;
55、统计图像的最大灰度值和最小灰度值,计算初始阈值:
56、
57、其中初始阈值为q0,图像的最大灰度值为wmax,图像的最小灰度值为wmin;
58、将大于初始阈值的图像作为背景,小于初始阈值的作为前景,根据前景灰度均值和背景灰度均值更新初始阈值,表达式为:
59、
60、其中前景灰度均值为背景灰度均值为更新后的阈值为q1;
61、根据更新后的阈值对图像进行分割,对行驶车辆进行定位,计算图像中行驶车辆的梯度幅度和相位:
62、
63、其中梯度幅度为qr,相位为u,图像梯度的水平分量为qrw,图像梯度的垂直分量为qrj;
64、根据梯度幅度和相位计算车辆行驶车道前后方车辆间距,将车辆间距输出为车辆间数据。
65、进一步的,根据所述车辆间数据构建低能见度公路通行管控模型的方法,包括:
66、将车辆间数据中车辆间的距离与间距阈值进行比较,当车辆行驶车道前后方车辆间距小于阈值时,紧急安全预警;
67、低能见度公路通行管控模型包括随机森林算法、目标检测算法、谱聚类算法、bp神经网络算法;
68、随机森林算法按照7:2的比例将输入数据随机划分为训练数据和测试数据;
69、目标检测算法通过训练卷积神经网络自动提取训练数据的图像特征,使用图像特征来识别和定位图像中的目标车辆;
70、谱聚类算法利用目标车辆的驾驶习惯相似性矩阵来构建图的拉普拉斯矩阵,通过驾驶特征向量进行聚类,获得习惯聚类;
71、bp神经网络算法在低能见度公路通行监测中通过学习车辆间数据的模式,对习惯聚类进行非线性映射,识别预测交通状况进行通行监测;
72、将测试数据输入低能见度公路通行管控模型获得预测车辆间数据,根据预测车辆间数据和实际预测车辆间数据的均方差调整低能见度公路通行管控模型的超参数,直到均方差小于0.11。
73、第二方面,一种低能见度环境下的公路通行管控系统,包括:
74、数据采集模块:用于采集低能见度环境下公路的通行数据和图像数据,对所述通行数据和所述图像数据进行预处理;
75、数据处理模块:用于根据所述通行数据构建高可靠感知矩阵,按照公路车道对所述高可靠感知矩阵进行分区编码获得区域编码,对所述图像数据进行定位识别获得定位数据;
76、轨迹演算模块:用于根据相似度采用感知网络对所述区域编码进行运动检测获得运动数据,才用所述定位数据校正所述运动数据获得修正数据,将所述修正数据输入轨迹演算预测模型获得行驶运动轨迹;包括:
77、
78、其中第s个运动数据的感应角度为θs,定位数据的数量为第s个定位数据的实测角度为θo,第s个运动数据为ks,第s个影响因子为第t个时刻的第s个运动数据为ks,t,第t+1个时刻的第s个运动数据为ks,t+1,观测时刻上限为t,第s个偏差权重为δs,第s个定位数据为ls,第s个修正数据为ζs,调控因子为ε;
79、车辆管控模块:用于采用边缘检测根据所述行驶运动轨迹获取车辆间数据,根据所述车辆间数据构建低能见度公路通行管控模型,将待管控数据输入所述低能见度公路通行管控模型,输出管控结果。
80、本发明的有益效果是:
81、本发明是一种低能见度环境下的公路通行管控方法及系统,与现有技术相比,本发明具有以下技术效果:
82、本发明通过预处理、分区编码、定位识别、运动检测、数据校正、轨迹演算、边缘检测和模型构建步骤,可以提高低能见度环境下的公路通行管控的准确性,从而提高低能见度环境下的公路通行管控的精度,将低能见度环境下的公路通行管控的定位优化,可以大大节省资源,提高工作效率,可以实现对低能见度环境下的公路通行的智能管控,实时对低能见度环境下的公路通行管控进行定位修正和轨迹演算,对低能见度环境下的公路通行管控具有重要意义,可以适应不同标准的多低能见度环境下的公路通行管控、不同低能见度环境下的公路通行管控需求,具有一定的普适性。
- 还没有人留言评论。精彩留言会获得点赞!