一种应用于低空经济的航空器间隔管理方法与流程
本技术涉及航空器间隔管理,更具体的,涉及一种应用于低空经济的航空器间隔管理方法。
背景技术:
1、在现在低空经济的大力发展大环境下,低空经济的航空器会逐步增加数量,航空器数量增加后对其飞行的安全就有更多的挑战。低空经济的航空器应该具备安全飞行的技术能力,在复杂的低空空域环境下,保证自身的飞行安全,本发明就是低空经济的航空器一种保证飞行安全的技术能力,可以为航空器提供与其他的航空器始终保持正确的安全距离,避免出现不必要的安全事故。
2、现在低空经济的航空器都是靠驾驶员目视保持与其他航空器的飞行间隔,这既难以掌握,而且又不够精确,并且不能接受数字化的指令。这其中的弊端是航空器的驾驶员为了保证安全会增大与其他航空器的飞行间隔,比目标的飞行间隔增大很多,甚至会增加几倍,由于所有航空器都会这样,就减少了低空空域中航空器的数量,使低空空域的承载瓶颈增大,影响低空经济的发展。
3、现有的技术是依靠航空器的驾驶员目视以及飞行经验来判断与其他航空器的飞行间隔,然后操作航空器舵面操作航空器保持安全距离。第一,目视很难确认目标的精准度,并且会出现目视偏差,只能靠经验去判断;第二,每个驾驶员的飞行经验不同,对飞行间隔控制能力也不同,会出现控制间隔不够精确;第三,对于以后的数字化飞行存在技术障碍。另外,中心化的控制系统只能提供安全间隔数据,无法给每个航空器针对此安全间隔数据的精准指导速度。
4、因为存在上面的问题,航空器的驾驶员不得不把飞行间隔增大很多,来保证飞行安全,就减少了低空空域的航空器密度,航空器数量无法增加,影响低空经济的发展。
技术实现思路
1、鉴于上述问题,本发明的目的是提供一种应用于低空经济的航空器间隔管理方法,本发明提出针对航空器周边空域的交通信息与环境信息,以及提供的飞行间隔目标,对航空器的飞行速度、飞行轨迹进行指导,来保证飞行安全间隔,既保证安全又提高的效率,并且提高航空器间间距的精度和一致性,并减少每架飞机的操控人员的工作量,有效降低低空交通管制人员和飞行员的工作负荷。
2、本发明第一方面提供了一种应用于低空经济的航空器间隔管理方法,包括:
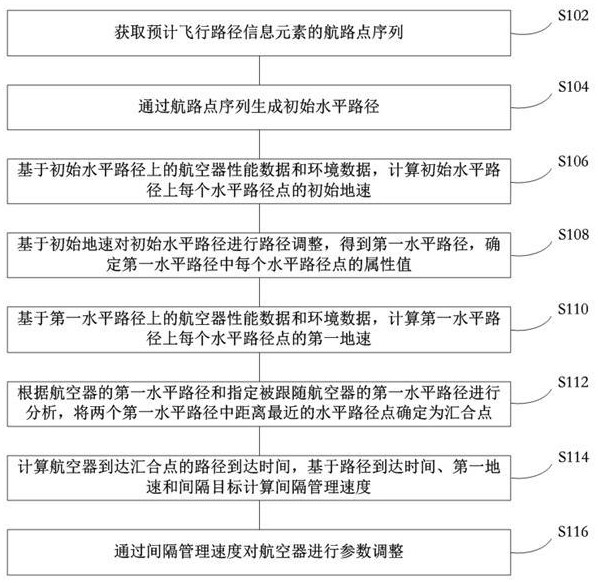
3、获取预计飞行路径信息元素的航路点序列;
4、通过所述航路点序列生成初始水平路径;
5、基于所述初始水平路径上的航空器性能数据和环境数据,计算所述初始水平路径上每个水平路径点的初始地速;所述航空器性能数据和环境数据包括航空器空速、飞行高度、风速和温度;
6、基于所述初始地速对所述初始水平路径进行路径调整,得到第一水平路径,确定所述第一水平路径中每个水平路径点的属性值;所述水平路径点的属性值包括序号、坐标、到第一水平路径点的距离、轨迹类型、航线角、转弯的中心点坐标、转弯结束角度、转弯开始角度和转弯半径;
7、基于所述第一水平路径上的航空器性能数据和环境数据,计算所述第一水平路径上每个水平路径点的第一地速;
8、根据航空器的第一水平路径和指定被跟随航空器的第一水平路径进行分析,将两个第一水平路径中距离最近的水平路径点确定为汇合点;
9、计算航空器到达汇合点的路径到达时间,基于所述路径到达时间、第一地速和间隔目标计算间隔管理速度;所述间隔管理速度包括航空器到达汇合点之前的间隔管理速度和经过汇合点之后的间隔管理速度;所述路径到达时间包括航空器到达最后一个水平路径点的时间和到达汇合点的时间;
10、通过所述间隔管理速度对航空器进行参数调整。
11、本方案中,还包括:
12、将航路点序列中航路点的经纬度确定航路点的大地坐标(h,l);
13、将航路点的大地坐标转化为东北上坐标(x,y,z);
14、将航路点序列中最后一个航路点的东北上坐标确定为原点坐标,所述最后一个航路点的坐标为(x,y,z)=(0,0,0);
15、根据所述最后一个航路点进行反算,对每个航路点的东北上坐标进行调整;
16、。
17、本方案中,还包括:
18、根据航路点的东北上坐标(xi,yi,zi)计算相邻航路点之间的航线角;
19、;
20、计算相邻航路点航线角的角度变化值;
21、;
22、根据相邻航路点航线角的角度变化值计算转弯时的倾斜角;
23、;
24、根据所述倾斜角和当前航路点的地速vgs计算转弯半径;
25、;
26、其中,i为航路点序号,g为重力加速度。
27、本方案中,还包括:
28、根据转弯半径和相邻航路点航线角的角度变化值计算航线转弯的开始点坐标(,)、结束点坐标(,)和中心点坐标(,);
29、根据转弯半径、航线转弯的开始点坐标(,)、结束点坐标(,)和中心点坐标(,)确定转弯结束角度和转弯开始角度。
30、本方案中,还包括:
31、根据相邻航路点航线角的角度变化值进行分析,确定航路点的轨迹类型;所述轨迹类型包括直线轨迹和转弯轨迹;
32、当时,所述航路点的轨迹类型为直线轨迹;当时,所述航路点的轨迹类型为转弯轨迹;
33、将航路点确定为水平路径的水平路径点,将航路点序列中最后一个航路点确定为第一个水平路径点,按照航路点相反顺序依次对每个水平路径点进行编号;
34、分别计算每个水平路径点到第一个水平路径点的坐标距离。
35、本方案中,还包括:
36、通过四维航迹数据确定航空器到达每个水平路径点的计划到达时间;
37、计算每个水平路径点到第一个水平路径点的距离和计划到达时间的比值,结合飞行影响数据,确定每个水平路径点的地速。
38、本方案中,还包括:
39、将航空器当前坐标最近的水平路径点确定为水平路径点j;
40、通过水平路径点的航线角确定水平路径点j的四个象限;
41、所述水平路径点j的四个象限分别为象限1、象限2、象限3和象限4;
42、;
43、其中,hpt表示水平路径,j表示水平路径点的序号,是水平路径点j的角度;
44、计算航空器当前位置与水平路径点j之间的角度;
45、;
46、其中,xa、ya是航空器当前位置的坐标,、是水平路径点j的坐标;
47、计算水平路径点j的每个象限的两个象限边界值和航空器当前位置与水平路径点j之间的角度的角度差值,当两个角度差值均小于时,确定航空器当前位置坐标在的水平路径点j的象限数据;
48、根据最近水平路径点的轨迹类型和所述象限数据确定航空器要到达的点;
49、计算航空器当前坐标与要到达的点之间的航迹误差;
50、当航空器要到达的点为直线轨迹时,航迹误差的计算方法用公式表示为:
51、<msub><mi>e</mi><mi>xtrk</mi></msub><mi>=-</mi><mrow><mi>x-x</mi><mi>nexthpt</mi></mfenced></mrow></mfenced><mi>sinθ+[y-y(nexthpt)]cosθ</mi>;
52、其中,nexthpt是航空器要到达的点,x(nexthpt)、y(nexthpt)是航空器要到达的点的坐标;
53、当航空器要到达的点为转弯轨迹时,航迹误差的计算方法用公式表示为:
54、;
55、其中,r(nexthpt)代表航空器要到达的点的转弯半径,代表转弯的方向,如果转弯结束时的航向角大于转弯开始时的航向角,则为1,否则为-1;
56、当航迹误差小于预设距离阈值时,将所述航迹误差所对应水平路径点确定为最接近的点;
57、根据所述最接近的点的确定航空器在水平路径上的路径位置。
58、本方案中,还包括:
59、根据航空器在水平路径上的路径位置确定下一个水平路径点;
60、计算航空器当前位置下一个水平路径点的距离apd(nexthpt);
61、当下一个水平路径点为直线轨迹时,
62、<mi>apd</mi><mi>nexthpt</mi></mfenced><mi>=</mi><mrow><mi>x-x</mi><mi>nexthpt</mi></mfenced></mrow></mfenced><mi>cosθ+[y-y(nexthpt)sinθ]</mi>;
63、当下一个水平路径点为转弯轨迹时,
64、;
65、;
66、;
67、其中,r为下一个水平路径点的转弯半径,为航空器当前位置与转弯的水平路径点(,)之间的角度,为航空器当前位置与转弯的水平路径点的转弯中心点(,)之间的角度;
68、根据航空器当前位置到下一个水平路径点的距离apd(nexthpt)和下一个水平路径点到最后一个水平路径点的距离l(nexthpt),计算航空器当前位置到最后一个水平路径点的累积路径长度apd;
69、;
70、根据所述航空器当前位置到最后一个水平路径点的累积路径长度apd和所述航空器在水平路径上每个水平路径点的地速,计算所述航空器到达最后一个水平路径点的时间和到达汇合点的时间;
71、根据指定被跟随航空器当前位置到最后一个水平路径点的累积路径长度apd’和指定被跟随航空器在水平路径上每个水平路径点的地速,计算所述指定被跟随航空器到达最后一个水平路径点的时间。
72、本方案中,还包括:
73、在航空器到达汇合点之前时,根据当前时间t下航空器到终点的距离和指定被跟随航空器到终点的距离计算测量间距;
74、;
75、其中,t为当前时间,为航空器与航路角度水平对齐的时间,为当前时间t下航空器的地面速度;
76、根据指定被跟随航空器在当前时间减去指定间隔目标的时间点到终点的距离和航空器到终点的距离计算间距误差;
77、;
78、当>0,且≠0时,计算间隔管理速度;
79、<msubsup><mi>v</mi><mi>gs</mi><mi>cl</mi></msubsup><mi>t</mi></mfenced><mi>=</mi><msubsup><mi>v</mi><mi>gs</mi><mi>t</mi></msubsup><mi>t-asg</mi></mfenced><mo>+</mo><msub><mi>k</mi><mi>th</mi></msub><mi>[</mi><msub><mi>s</mi><mi>t</mi></msub><mi>t-asg</mi></mfenced><mi>-</mi><msub><mi>s</mi><mi>o</mi></msub><mi>(t)]</mi>;
80、其中,是在当前时间减去指定间隔时间的时刻匹配指定被跟随航空器的地面速度,是控制增益,的取值为0.008-1秒,是当前时间减去指定间隔时间的时刻匹配指定被跟随航空器的到达终点距离,当前时间航空器到终点的距离。
81、本方案中,还包括:
82、当航空器经过汇合点之后,再次计算间距误差;
83、;
84、其中,t为当前时间,asg为指定间隔目标,和分别为航空器到达最后一个水平路径点的时间和到达汇合点的时间,为指定被跟随航空器到达最后一个水平路径点的时间
85、计算航空器到达指定间隔目标的到达时间,当<时,=;所述=航空器当前位置到汇合点距离×0.25;
86、反之,
87、;
88、基于航空器到达指定间隔目标的到达时间计算间隔管理速度;
89、<msubsup><mi>v</mi><mi>cas</mi><mi>cl</mi></msubsup><mi>t</mi></mfenced><mi>=</mi><msubsup><mi>v</mi><mi>cas</mi><mi>o</mi></msubsup><mrow><msubsup><mi>ttg</mi><mi>o</mi><mi>*</mi></msubsup><mi>(t)</mi></mrow></mfenced><mo>+</mo><msub><mi>k</mi><mi>ttg</mi></msub><mi>*[</mi><msubsup><mi>s</mi><mi>o</mi><mi>*</mi></msubsup><mrow><msubsup><mi>ttg</mi><mi>o</mi><mi>*</mi></msubsup><mi>t</mi></mfenced></mrow></mfenced><mi>-</mi><msub><mi>s</mi><mi>o</mi></msub><mi>(t)]</mi>;
90、其中,为新的到达时间的空速,为新的到达时间的距离,为原来到达时间的距离,为控制增益,的取值为0.008-1秒。
91、本发明公开了一种应用于低空经济的航空器间隔管理方法,通过间隔管理算法实现高密度、高复杂度低空运行自组织的安全、高效和可扩展飞行操作,并且间隔管理方法将提高航空器之间自主间隔配备保障的准确性和一致性,有效降低低空交通管制人员和飞行员的工作负荷。该方法可以使航空器自主或辅助飞行员达到或保持目标低空运行场景的间隔要求。实现高密度、高频次、高复杂度、各类异构飞行器融合空域运行,增加空域范围内的航空器数量。
- 还没有人留言评论。精彩留言会获得点赞!