一种适用于复杂道路节点的最优交通安全替代指标选取方法及系统
本发明涉及交通安全替代指标选取领域,尤其涉及一种适用于复杂道路节点的最优交通安全替代指标选取方法及系统。
背景技术:
1、长期以来,交通风险评估普遍采用交通事故统计指标来评价道路交通安全情况,但是传统的交通事故评价方法开展难度大,而随着交通冲突理论的逐渐成熟,交通安全替代指标凭借大样本、小周期、小区域、高可靠性等优点,逐渐代替传统事故统计,被广泛应用于安全评价和预测。现阶段针对单一交通冲突替代指标的适用场景的局限性,许多自造指标以及复合指标已经逐渐用于交通安全评估。
2、目前对于安全替代指标的选取没有一个确定的标准,特别是针对复杂的道路节点例如收费站分流区等,选取不同的安全替代指标会对安全评估结果精度有很大的影响,因此需要在安全评价前进行合理的选取,此外,传统的安全评价指标存在各自的局限性和不一致性,实际应用中难以获得精确的预测结果,因此用复合的改进度量指标比单一指标具有更好的普适性,但缺少将复合指标与传统单一指标进行横向对比的评价体系。鉴于此,提出一个更加系统的交通安全替代评价方案,以期提高交通安全评价结果精准度至关重要。
技术实现思路
1、针对复杂的道路节点对于安全替代指标的选取没有标准的选取方法以及现有研究多采用单一指标进行交通安全评价的问题,本发明提供了一种适用于复杂道路节点的最优交通安全替代指标选取方法及系统,所述方法在特定危险场景下横向对比交通冲突替代指标,能够突破传统交通事故评价方法中对样本和数据难以处理的问题,实现了提高交通安全评价结果精准度的目标。
2、第一方面,本发明提供了一种适用于复杂道路节点的最优交通安全替代指标选取方法,包括:
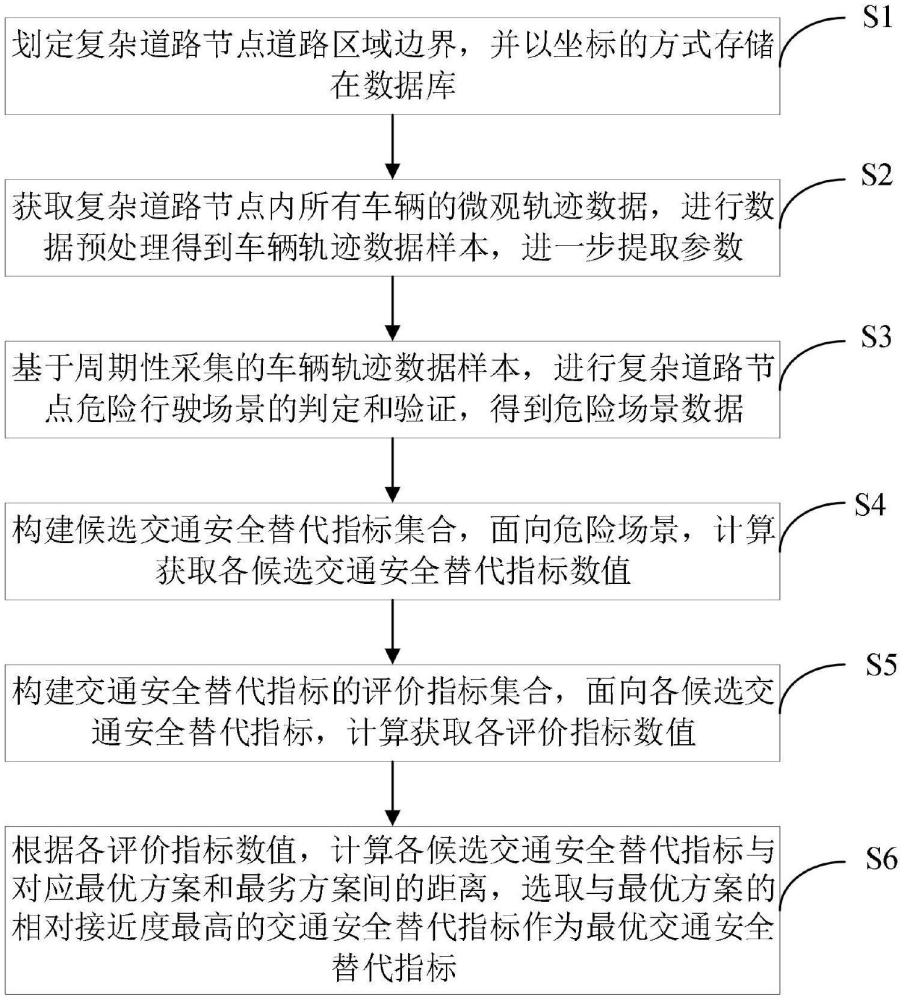
3、s1:划定复杂道路节点道路区域边界,并以坐标的方式存储在数据库;
4、s2:周期性获取复杂道路节点内所有车辆的微观轨迹数据,并进行数据预处理得到车辆轨迹数据样本,进一步提取参数;
5、s3:基于车辆轨迹数据样本及提取的参数,进行复杂道路节点危险行驶场景的判定和验证,得到危险场景数据;
6、s4:构建候选交通安全替代指标集合,面向危险场景,计算获取各候选交通安全替代指标数值,并进行低危和高危状态划分;
7、s5:构建交通安全替代指标的评价指标集合,面向各候选交通安全替代指标,计算获取各评价指标数值,其中,评价指标包括准确性、快速性、严重性;
8、s06:根据各评价指标数值,计算各候选交通安全替代指标与对应最优方案和最劣方案间的距离,选取与最优方案的相对接近度最高的交通安全替代指标作为最优交通安全替代指标。
9、进一步地,s1的具体过程为:
10、s11.复杂道路节点道路区域边界的划定:通过高精度地图数据和卫星影像识别复杂道路节点,如交叉路口、多层立交桥、环形交叉口等;在识别出的区域内,选取多个代表性点,这些代表性点包括道路中心线、路缘线、交通岛边缘等关键位置;基于选取的代表性点,应用边界拟合算法,如凸包算法或多边形拟合算法,生成道路区域的边界多边形,精确描述复杂道路节点的几何形状和范围。
11、s12.基于获取的复杂道路节点道路区域边界坐标建立数据库:将生成的边界多边形的各顶点坐标进行坐标转换,即从地图坐标系转换为全球定位系统(gps)坐标系或其他适用的地理坐标系,以确保不同数据源之间的坐标一致性;将转换后的边界坐标数据以结构化的形式存储在数据库中,其中数据库设计采用关系型数据库或空间数据库,具体表结构包括节点id、边界顶点坐标(经度和纬度)、时间戳等字段;存储过程涵盖数据的插入、更新和备份,确保数据的完整性和安全性。
12、s13.面向建成的数据库,为了确保数据库内边界数据的准确性和完整性,对存储在数据库中的边界数据进行验证,包括与实地测量数据进行比对或通过实地调查验证。根据验证结果,对不准确或不完整的边界数据进行调整和修正,确保其真实反映复杂道路节点的实际情况。
13、进一步地,s2步骤包括:
14、s21.复杂道路节点的车辆微观轨迹数据的获取是通过使用路侧感知设备(如毫米波雷达和激光雷达)或航拍对复杂道路节点的全部区域进行车辆运动轨迹数据采集,并进行数据预处理,其中数据预处理包含:
15、数据清洗:去除数据中的无效值、错误值和重复值;
16、数据同步:将不同传感器获取的数据进行时间同步,确保数据的一致性;
17、时间对齐:将不同时间点收集的数据进行时间序列的对齐,确保数据在时间轴上的一致性;
18、空间校正:对于航拍或路侧感知设备获取的数据,需要进行空间校正,将图像数据转换为实际地面坐标,确保数据的准确性;
19、s22.通过路侧边缘计算设备处理车辆轨迹数据样本,进行参数提取,得到车辆特征参数、环境特征参数;其中,车辆特征参数包括:车辆编号、位置坐标、航向角、速度、加速度、车辆类型、所在车道、距离、时间,环境特征参数包括与前车距离、前车速度。
20、优选地,复杂道路节点的车辆微观轨迹数据的获取还通过对调查地点进行视频拍摄,利用视频自动识别技术从视频背景中分离出背景,并追踪车辆获取连续的车辆微观轨迹数据。
21、进一步地,所述s3步骤包括:
22、所述危险行驶场景的判定是基于预处理后采集的车辆轨迹数据样本所提取的车辆特征参数(如车速、距离、时间、位置坐标),判别样本内各车辆cf的车头中心点在每一时刻t时与前车cl车尾中心点之间的瞬时监测距离d与本车制动距离s之间的大小关系,当d<s时,则判定此时为cf车的危险行驶场景开始时刻当d小于等于0.5米,则判别为发生碰撞且危险场景结束时刻共获取n个危险行驶场景数据,该危险场景数据为交通安全替代指标的参考集a。
23、其中,d为瞬时监测距离,即车辆cf车头中心点与前车cl车尾中心点之间的空间距离;s为车辆cf的制动距离,其计算公式如下:
24、
25、式中,t1为驾驶员开始踩下制动踏板到制动开始生效的时间;t2为制动力增加的时间;v0为汽车制动初速度;jmax为最大制动减速度。
26、并根据各车辆cf的车头中心点在每一时刻t时与前车cl车尾中心点之间的瞬时监测距离d的大小,将所有危险场景划分为两个状态:低危状态和高危状态:
27、低危状态,即各车辆cf处于x≤d<s的状态,其中x为前车cl正常行驶时,后车cf的安全制动距离,其计算公式如下:
28、
29、v1为前车cl的速度。
30、高危状态,即各车辆cf处于0≤d<x的状态。
31、进一步地,s4步骤包括:
32、s41.构建候选交通安全替代指标集合,其中,候选交通安全替代指标包括:距离碰撞时间(ttc)、改进距离碰撞时间(mttc)、拓展距离碰撞时间(ettc)、干扰碰撞时间(ttcd)、避免碰撞减速率(drac)、复合指标comettc;
33、s42.面向危险场景参考集a,计算获取每一帧各候选交通安全替代指标的具体数值;
34、s43.将各候选交通安全替代指标进行状态划分,状态包括低危状态及高危状态:当各指标的数值处于预设低危状态的阈值范围内时,则划分为低危状态;当各指标的数值处于预设高危状态的阈值范围内时,则划分为高危状态;
35、其中,复合指标comettc是基于某一车辆在场景中某一时段t=[t0-t*,t0+t*]内的均值ettcmean、极值ettcmin和t0时刻的瞬时ettc值构建得到;其中,t0为危险场景参考集a中任意时刻,t*为人工设定的时段区间长度,comettc的值每一帧计算一次;
36、计算每一帧t的瞬时ettct值,t为任意时刻,并对瞬时ettct值进行预处理:当ettct<0s或ettct>10s时,则设定ettct=10s,ettcmean为时段t内车辆cf每一时刻t的ettct的均值;ettcmin为时段t内车辆cf的ettct的最小值,为t0时刻的瞬时ettc值;ettcmean、ettcmin计算公式如下:
37、
38、进一步地,基于三项基本指标ettcmean和ettcmin构建复合指标comettc的具体过程为:
39、s421:对危险场景参考集a划分的所有时段t=[t0-t*,t0+t*]的三项基本指标做标准化处理
40、
41、式中,yij为第i个时段在第j个基本指标下标准化后的值;xij为第i个时段在第j个基本指标下的值,i=1,2,…,n;j=1,2,3,分别对应三个基本指标ettcmean和ettcmin;
42、s422.基于标准化后的值yij,计算三项基本指标ettcmean和ettcmin的信息熵,计算公式如下:
43、
44、
45、式中,ej为第j个基本指标的信息熵;fij为第j个基本指标下第i个时段占该指标所有样本值之和的比重;yij为第i个时段在第j个基本指标下标准化后的值,i=1,2,…,n;j=1,2,3,分别对应三个基本指标ettcmean和ettcmin;
46、s423.基于三项基本指标ettcmean和ettcmin的信息熵ej,计算三项基本指标的差异度系数和熵权值:
47、gj=1-ej
48、
49、w={w1,w2,w3}
50、式中,wj为第j个基本指标下的熵权;gj为第j个基本指标的差异度系数,j=1,2,3,分别对应三个基本指标ettcmean和ettcmin;w为三个基本指标的熵权矩阵;
51、s424.基于标准化后的值yij和熵权值wj,构建加权决策矩阵:
52、zij=yij×wj
53、
54、其中,z为加权决策矩阵;yij为第i个时段在第j个基本指标下标准化后的值,zij为第i个时段在第j个基本指标下加权后的标准化值;wj为第j个基本指标下的熵权;i=1,2,…,n;j=1,2,3,分别对应三个基本指标ettcmean和ettcmin;
55、s425.面向计算出的加权决策矩阵z,获取所有时段中的冲突最小的时段和冲突最大的时段;其中,冲突最小的时段指加权决策矩阵中每一个基本指标下的最大值;冲突最大的时段指加权决策矩阵中每一个评价指标下的最小值:
56、
57、其中,z+为冲突最小的时段;z-为冲突最大的时段;
58、s426.计算各时段在第j个基本指标下分别与冲突最小的时段、冲突最大的时段的距离:
59、
60、其中,为第i个时段与冲突最小的时段的距离;为第i个时段与冲突最大的时段的距离;为第j个基本指标下的冲突最小的时段;zij为第i个时段在第j个基本指标下加权后的标准化值;为第j个基本指标下的冲突最大的时段;i=1,2,…,n;j=1,2,3,分别对应三个基本指标ettcmean和ettcmin;
61、s427.基于各时段与冲突最小的时段和冲突最大的时段的距离计算第i个持续性冲突时段与冲突最小的时段的相对接近度si,即第i个时段中心时刻t0的复合指标值,其中相对接近度si的计算公式如下:
62、
63、其中,为第i个时段与冲突最大的时段的距离;为第i个时段与冲突最小的时段的距离;i=1,2,…,n;si为第i个时段与冲突最小的时段的相对接近度。若0.4≤si<1则该场景为低危状态,若0<si<0.4则该场景为高危状态。
64、进一步地,交通安全替代指标的评价指标集合是指评价所有交通安全替代指标性能的评价指标的集合,其中评价指标包括准确性、快速性、严重性:
65、准确性指各交通冲突替代指标对危险场景识别的准确率,准确率越高越优。其计算是指在所选的参考集a中的n个危险场景中,当前交通冲突替代指标对各个场景的判断结果为低危状态或高危状态的场景数量占所有危险场景数量的比例,以ttc为例,对参考集a内的任意一个危险场景,ttc在各个时刻对场景的判别结果为低危或高危的次数的时刻占场景持续时间的50%以上,即算为对该场景危险判别准确。对参考集a内n个场景,以ttc为判别指标存在yi次判别准确,则该指标的准确性为
66、快速性指各交通冲突替代指标对危险或高危场景识别的快速性,越早识别越优。其计算是指对参考集a内的任意一个危险场景,以第i个场景内开始时刻为判别标准时刻,采用各交通冲突指标x对同一场景进行危险状态判断,各指标对第i个场景第一次判别为危险或高危状态的时刻为获取各指标的时刻与第i个场景的时刻之间的时间差当δti,x为正值时,表示指标对场景危险状态的判别早于参考集a内人工判别,此时各指标判别的快速性可表示为且为正值,取值范围为[0,1],其中为各指标内最快判别准确的指标的时刻与第i个场景的时刻之间的时间差。当δti,x为负值时,表示指标对场景危险状态的判别晚于参考集a内人工判别,此时各指标判别的快速性可表示为其中为第i个场景的结束时刻,且为负值,取值范围为(0,-∞),以ttc为例,在n个场景下,其快速性为
67、严重性指各交通冲突替代指标对危险/高危场景的各种危险状态识别的准确性,准确率越高越优。其计算是指在所选的参考集a中的n个危险场景中,当前交通冲突替代指标对各个场景的判断结果为危险状态的场景数量占所有危险状态场景数量的比例p1,和对各个场景的判断结果为高危状态的场景数量占所有高危状态场景数量的比例p2,选取p1和p2的平均值为严重性评价指标。以ttc为例,
68、进一步地,s6的具体过程为:
69、s61:对所有候选交通安全替代指标的准确性、快速性、严重性值进行标准化:
70、
71、其中,yij为第i个安全替代指标在第j个评价指标下标准化后的值;xij为第i个安全替代指标在第j个评价指标下的值;i为安全替代指标,i=1,2,…,n;j为评价指标,当j=1时为准确性,当j=2时为快速性,当j=3时为严重性;
72、s62:基于各安全替代指标在各个评价指标下标准化后的值yij,计算各评价指标的信息熵ej和差异度系数gj,公式如下:
73、
74、gj=1-ej
75、式中,ej为第j个评价指标的信息熵,当j=1时为准确性,当j=2时为快速性,当j=3时为严重性;fij为第j个评价指标下第i个安全替代指标占该指标所有样本值的比重,i=1,2,…,n;yij为第i个安全替代指标在第j个评价指标下标准化后的值;gj为第j个评价指标的差异度系数;
76、s63:基于得到的第j个评价指标的差异度系数,计算获取第j个评价指标对应的熵权wj并建立熵权矩阵w:
77、
78、w={w1,w2,w3}
79、其中,wj为第j个评价指标下的熵权,当j=1时为准确性,当j=2时为快速性,当j=3时为严重性;gj为第j个评价指标的差异度系数;w为熵权矩阵。
80、s64:基于标准化值yij和熵权值wj,构建加权决策矩阵:
81、zij=yij×wj
82、
83、其中,z为加权决策矩阵;yij为第i个安全替代指标在第j个评价指标下标准化后的值,i=1,2,…,n,当j=1时为准确性,当j=2时为快速性,当j=3时为严重性;wj为第j个评价指标下的熵权;
84、s65:将加权决策矩阵z中每一个评价指标下的最大值定义为最优方案;将加权决策矩阵中每一个评价指标下的最小值定义为最劣方案:
85、
86、其中,z+为最优方案;z-为最劣方案;
87、s66:基于每一个评价指标下的最优方案z+和最劣方案z-,计算各候选交通安全替代指标在第j个评价指标下分别与最优方案、最劣方案间的距离:
88、
89、其中,为第i个交通安全替代指标与最优方案的距离;为第i个交通安全替代指标与最优方案的距离;为第j个评价指标下的最优方案;zij为第j个评价指标下第i个安全替代指标的加权值;为第j个评价指标下的最劣方案,i=1,2,…,n,当j=1时为准确性,当j=2时为快速性,当j=3时为严重性;
90、s67:基于各交通安全替代指标与最优方案和最劣方案的距离计算第i个安全替代指标与最优方案的相对接近度si,其中相对接近度si的计算公式如下:
91、
92、其中,si为第i个交通安全替代指标与最优方案的相对接近度;为第i个交通安全替代指标与最劣方案的距离;为第i个交通安全替代指标与最优方案的距离,i=1,2,…,n,
93、s68:选取相对接近度si最高的安全替代指标最为最优交通安全替代指标。
94、第二方面,本发明提供了一种适用于复杂道路节点的最优交通安全替代指标选取系统,包括:
95、数据获取及预处理模块;用于划定复杂道路节点道路区域边界,并以坐标的方式存储在数据库;依托路侧感知设备,周期性获取复杂道路节点内所有车辆完整的微观轨迹数据,并进行数据预处理和参数提取;
96、危险场景数据计算获取模块:用于基于车辆轨迹数据样本及提取的参数,进行复杂道路节点危险行驶场景的判定和验证,得到危险场景数据;
97、候选交通安全替代指标数值获取模块:用于构建候选交通安全替代指标集合,面向危险场景,计算获取各候选交通安全替代指标数值;
98、最优交通安全替代指标获取模块:用于构建交通安全替代指标的评价指标集合,面向各候选交通安全替代指标,计算获取各评价指标数值,其中,评价指标包括准确性、快速性、严重性;根据各评价指标数值,计算各候选交通安全替代指标与对应最优方案和最劣方案间的距离,选取与最优方案的相对接近度最高的交通安全替代指标作为最优交通安全替代指标。
99、有益效果
100、本发明提出了一种适用于复杂道路节点的最优交通安全替代指标选取方法及系统,所述方法针对复杂道路节点中横向对比交通冲突替代指标,能够突破传统交通事故评价方法中对样本和数据难以处理的问题,充分考虑了各指标的特点,避免了单一指标的局限性,提高交通安全评价结果精准度。
- 还没有人留言评论。精彩留言会获得点赞!