车辆的目标感知方法和装置、存储介质和电子装置与流程
本技术实施例涉及交通控制领域,具体而言,涉及一种车辆的目标感知方法和装置、存储介质和电子装置。
背景技术:
1、感知技术是智能驾驶领域的关键技术可以对车辆、行人等动态障碍物进行感知。对于智能驾驶车辆,其可以通过其上配置的感知设备进行障碍物感知,并对感知到的目标物进行追踪,从而可以为智能驾驶车辆或者智能驾驶车辆的驾驶者提供障碍物信息,以便进行行驶路线规划。
2、感知设备能够感知到的目标物为其感知范围内的目标物,而感知设备的感知范围然而,通常有限,往往存在视野盲区,视野盲区内的目标物可能会给智能驾驶车辆带来严重危险。由此可见,相关技术中车辆的目标感知方法,存在由于无法感知视野盲区内的目标物导致的车辆行驶安全性差的问题。
技术实现思路
1、本技术实施例提供了一种车辆的目标感知方法和装置、存储介质和电子装置,以至少解决相关技术中的车辆的目标感知方法存在由于无法感知视野盲区内的目标物导致的车辆行驶安全性差的技术问题。
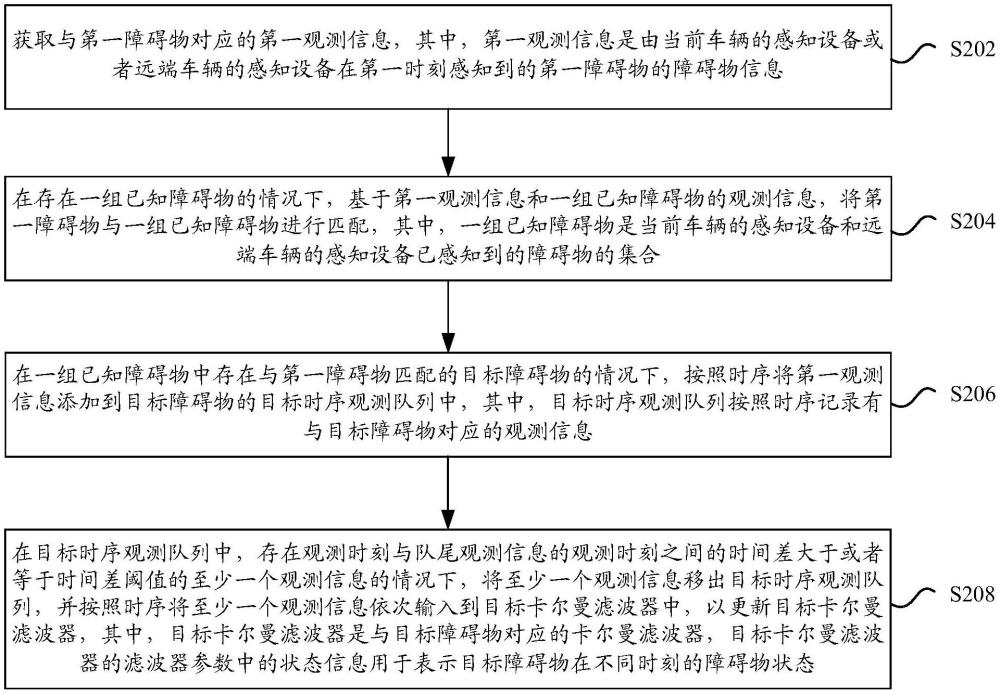
2、根据本技术实施例的一个方面,提供了一种车辆的目标感知方法,包括:获取与第一障碍物对应的第一观测信息,其中,所述第一观测信息是由当前车辆的感知设备或者远端车辆的感知设备在第一时刻感知到的所述第一障碍物的障碍物信息;在存在一组已知障碍物的情况下,基于所述第一观测信息和所述一组已知障碍物的观测信息,将所述第一障碍物与所述一组已知障碍物进行匹配,其中,所述一组已知障碍物是所述当前车辆的感知设备和所述远端车辆的感知设备已感知到的障碍物的集合;在所述一组已知障碍物中存在与所述第一障碍物匹配的目标障碍物的情况下,按照时序将所述第一观测信息添加到所述目标障碍物的目标时序观测队列中,其中,所述目标时序观测队列按照时序记录有与所述目标障碍物对应的观测信息;在所述目标时序观测队列中,存在观测时刻与队尾观测信息的观测时刻之间的时间差大于或者等于时间差阈值的至少一个观测信息的情况下,将所述至少一个观测信息移出所述目标时序观测队列,并按照时序将所述至少一个观测信息依次输入到目标卡尔曼滤波器中,以更新所述目标卡尔曼滤波器,其中,所述目标卡尔曼滤波器是与所述目标障碍物对应的卡尔曼滤波器,所述目标卡尔曼滤波器的滤波器参数中的状态信息用于表示所述目标障碍物在不同时刻的障碍物状态。
3、根据本技术实施例的另一个方面,提供了一种车辆的目标感知装置,包括:第一获取单元,用于获取与第一障碍物对应的第一观测信息,其中,所述第一观测信息是由当前车辆的感知设备或者远端车辆的感知设备在第一时刻感知到的所述第一障碍物的障碍物信息;第一匹配单元,用于在存在一组已知障碍物的情况下,基于所述第一观测信息和所述一组已知障碍物的观测信息,将所述第一障碍物与所述一组已知障碍物进行匹配,其中,所述一组已知障碍物是所述当前车辆的感知设备和所述远端车辆的感知设备已感知到的障碍物的集合;添加单元,用于在所述一组已知障碍物中存在与所述第一障碍物匹配的目标障碍物的情况下,按照时序将所述第一观测信息添加到所述目标障碍物的目标时序观测队列中,其中,所述目标时序观测队列按照时序记录有与所述目标障碍物对应的观测信息;第一执行单元,用于在所述目标时序观测队列中,存在观测时刻与队尾观测信息的观测时刻之间的时间差大于或者等于时间差阈值的至少一个观测信息的情况下,将所述至少一个观测信息移出所述目标时序观测队列,并按照时序将所述至少一个观测信息依次输入到目标卡尔曼滤波器中,以更新所述目标卡尔曼滤波器,其中,所述目标卡尔曼滤波器是与所述目标障碍物对应的卡尔曼滤波器,所述目标卡尔曼滤波器的滤波器参数中的状态信息用于表示所述目标障碍物在不同时刻的障碍物状态。
4、在一个示例性实施例中,所述第一匹配单元包括:复制模块,用于分别复制与所述一组已知障碍物中的每个已知障碍物对应的卡尔曼滤波器,得到与所述每个已知障碍物对应的卡尔曼滤波器的副本;输入模块,用于将所述每个已知障碍物的时序观测队列中,观测时刻位于所述第一时刻之前的观测信息按照时序依次输入到与所述每个已知障碍物对应的卡尔曼滤波器的副本中,得到更新的与所述每个已知障碍物对应的卡尔曼滤波器的副本;预测模块,用于使用更新的与所述每个已知障碍物对应的卡尔曼滤波器的副本预测所述每个已知障碍物在所述第一时刻的障碍物信息,得到所述每个已知障碍物的预测障碍物信息;匹配模块,用于基于所述第一观测信息和所述每个已知障碍物的预测障碍物信息,将所述第一障碍物与所述每个已知障碍物分别进行匹配。
5、在一个示例性实施例中,所述装置还包括:第一确定单元,用于在所述按照时序将所述第一观测信息添加到所述目标障碍物的目标时序观测队列中之后,在所述第一观测信息被插入的位置不是所述目标时序观测队列的队尾的情况下,确定所述目标时序观测队列中,不存在观测时刻与队尾观测信息的观测时刻之间的时间差大于或者等于时间差阈值的观测信息;第二确定单元,用于在所述第一观测信息被插入的位置是所述目标时序观测队列的队尾、且所述目标时序观测队列的队首观测信息的观测时刻与所述第一时刻的时间差大于或者等于所述时间差阈值的情况下,确定所述目标时序观测队列中,存在观测时刻与队尾观测信息的观测时刻之间的时间差大于或者等于时间差阈值的至少一个观测信息;第三确定单元,用于在所述第一观测信息被插入的位置是所述目标时序观测队列的队尾、且所述目标时序观测队列的队首观测信息的观测时刻与所述第一时刻的时间差小于所述时间差阈值的情况下,确定所述目标时序观测队列中,不存在观测时刻与队尾观测信息的观测时刻之间的时间差大于或者等于时间差阈值的观测信息。
6、在一个示例性实施例中,所述装置还包括:复制单元,用于在所述按照时序将所述至少一个观测信息依次输入到目标卡尔曼滤波器中,以更新所述目标卡尔曼滤波器之后,在待输出所述目标障碍物最新的障碍物状态的情况下,复制更新的所述目标卡尔曼滤波器,得到所述目标卡尔曼滤波器的副本;第二执行单元,用于将所述目标时序观测队列中的观测信息按照时序依次输入到所述目标卡尔曼滤波器的副本中,并将所述目标卡尔曼滤波器的副本最后输出的状态信息作为所述目标障碍物的最新障碍物状态进行输出。
7、在一个示例性实施例中,所述第一获取单元包括:接收模块,用于通过所述当前车辆的v2x设备接收所述远端车辆通过所述远端车辆的v2x设备发送的所述第一观测信息,其中,所述第一观测信息是由所述远端车辆的感知设备在所述第一时刻感知到的所述第一障碍物的障碍物信息;或者,感知模块,用于通过所述当前车辆的感知设备进行障碍物感知,得到所述第一观测信息,其中,所述第一观测信息是由所述当前车辆的感知设备在所述第一时刻感知到的所述第一障碍物的障碍物信息。
8、在一个示例性实施例中,所述第一观测信息包括所述第一障碍物的位姿信息;所述感知模块包括:感知子模块,用于通过所述当前车辆的感知设备进行障碍物感知,得到与所述第一障碍物对应的障碍物感知结果;转换子模块,用于将所述障碍物感知结果中所述第一障碍物的位姿信息转换到指定坐标系下,得到更新的所述第一障碍物的位姿信息;生成子模块,用于根据更新的所述第一障碍物的位姿信息,生成所述第一观测信息;所述装置还包括:传播单元,用于在所述通过所述当前车辆的感知设备进行障碍物感知,得到所述第一观测信息之后,通过所述当前车辆的v2x设备广播所述第一观测信息,以将所述第一观测信息传输给除了所述当前车辆以外的其他车辆。
9、在一个示例性实施例中,所述装置还包括:第二获取单元,用于获取与第二障碍物对应的第二观测信息,其中,所述第二观测信息是由所述当前车辆的感知设备或者所述远端车辆的感知设备在第二时刻感知到的所述第二障碍物的障碍物信息;第二匹配单元,用于在存在所述一组已知障碍物的情况下,基于所述第二观测信息和所述一组已知障碍物的观测信息,将所述第二障碍物与所述一组已知障碍物进行匹配;第三执行单元,用于在所述一组已知障碍物中不存在与所述第二障碍物匹配的障碍物的情况下,为所述第二障碍物创建时序观测队列,将所述第二观测信息添加到创建的时序观测队列中,并为所述第二障碍物创建卡尔曼滤波器。
10、根据本技术实施例的又一个方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,其中,所述计算机程序被处理器执行时实现上述任一项方法实施例中的步骤。
11、根据本技术实施例的又一个方面,提供了一种电子装置,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任一项方法实施例中的步骤。
12、根据本技术实施例的又一个方面,提供一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行上述任一项方法实施例中的步骤。
13、在本技术实施例中,采用结合本端车辆(即,当前车辆)的感知设备感知到的观测信息和远端车辆的感知设备感知到的观测信息的方式,通过获取与第一障碍物对应的第一观测信息,其中,第一观测信息是由当前车辆的感知设备或者远端车辆的感知设备在第一时刻感知到的第一障碍物的障碍物信息;在存在一组已知障碍物的情况下,基于第一观测信息和一组已知障碍物的观测信息,将第一障碍物与一组已知障碍物进行匹配,其中,一组已知障碍物是当前车辆的感知设备和远端车辆的感知设备已感知到的障碍物的集合;在一组已知障碍物中存在与第一障碍物匹配的目标障碍物的情况下,按照时序将第一观测信息添加到目标障碍物的目标时序观测队列中,其中,目标时序观测队列按照时序记录有与目标障碍物对应的观测信息;在目标时序观测队列中,存在观测时刻与队尾观测信息的观测时刻之间的时间差大于或者等于时间差阈值的至少一个观测信息的情况下,将至少一个观测信息移出目标时序观测队列,并按照时序将至少一个观测信息依次输入到目标卡尔曼滤波器中,以更新目标卡尔曼滤波器,其中,目标卡尔曼滤波器是与目标障碍物对应的卡尔曼滤波器,目标卡尔曼滤波器的滤波器参数中的状态信息用于表示目标障碍物在不同时刻的障碍物状态,由于将当前车辆的感知设备和远端车辆的感知设备所感知到的同一障碍物的障碍物信息作为观测信息输入到卡尔曼滤波器,以对障碍物在不同时刻的障碍物状态进行预测,可以将多个感知设备的感知结果进行融合,对于自车感知设备感知不到的目标,能够通过其他车辆的感知设备观测到,从而降低单车感知系统的局限性,可以解决相关技术中的车辆的目标感知方法存在由于无法感知视野盲区内的目标物导致的车辆行驶安全性差的技术问题,达到提高车辆行驶安全性的技术效果;此外,将不同车辆的感知设备所感知到的同一障碍物的观测信息放入到同一时序观测队列,仅将观测时刻与最新的观测信息的观测时刻之间的时间差超过设定的时间差阈值的观测信息输入到卡尔曼滤波器中,解决由于无法保证多个感知设备的感知结果的时序性导致的部分观测信息无法被处理导致的障碍物状态预测的准确性低的问题,达到提高障碍物状态预测的准确性的技术效果。
- 还没有人留言评论。精彩留言会获得点赞!