一种基于异构线路场景的智能网联公交运行优化控制方法
本发明涉及一种智能网联公交运行优化控制方法。
背景技术:
1、作为交通系统的重要组成部分,许多城市致力于提高公共交通系统的服务水平和吸引力。智能网联公交的出现为促进城市公共交通高效运营提供了新机遇,可以为城市公共交通提供综合、高效、准确和可靠的信息服务体系,全面提升城市公共交通智能化水平。近年来,各个城市正在开展智能网联公交试点示范工作。2017年,首批智能网联公交车在中国深圳试行成功;2020年,中国长沙开通第一条智能网联公交线路“315”;2023年,新加坡智能网联公交车在中国进行首次封闭道路测试工作。智能网联公交应用场景正在从特定简单道路向城市地面公共交通的复杂道路拓展的过程中。因此,公共交通将在很长一段时间处于传统的人工驾驶公交线路(不具备任何网联功能)与智能网联公交线路共存的状态。这造成了基于公交专用道上行驶的智能网联公交车头时距不均匀性和站点、交叉口的拥堵等问题。
技术实现思路
1、本发明是要解决目前人工驾驶公交线路与智能网联公交线路的共存造成了基于公交专用道上行驶的智能网联公交车头时距不均匀性以及站点和交叉口的拥堵的技术问题,而提供一种基于异构线路场景的智能网联公交运行优化控制方法。
2、本发明的基于异构线路场景的智能网联公交运行优化控制方法是按以下步骤进行的:
3、步骤一:选择一条包含智能网联公交线路和人工驾驶公交线路的混合公交专用道搭建异构线路场景,建立异构线路场景中智能网联公交线路的属性集用于储存线路与节点信息,建立异构线路场景中智能网联公交车次属性集用于储存车次运行信息;
4、所述的智能网联公交线路的属性集包括非排队路段的长度、排队路段的长度、路段限速值、节点的位置和信号灯的配时信息,节点包括站点和信号灯处;排队路段为接近信号灯停止线之前的路段区域,即当信号灯处于红灯相位时公交车需要排队等待的路段区域,排队路段的长度是根据历史最大排队长度确定的;非排队路段为排队路段之外的路段;
5、智能网联公交车次属性集包括控制时段内车次的调度车头时距和初始发车时刻表;
6、步骤二:根据智能网联公交v2x技术实时获取智能网联公交车的位置和速度、站点乘客上下车数据、信号灯的状态、人工驾驶公交的位置和速度;
7、步骤三:聚焦智能网联公交运行状态,构建智能网联公交运行分级优化控制模型:
8、1、智能网联公交运行状态描述
9、本发明主要从是否考虑人工驾驶公交运行状态两方面描述智能网联公交运行状态;
10、1.1不考虑人工驾驶公交运行状态
11、智能网联公交车在各节点之间的非排队路段运行时间tik,j(1)、排队路段运行时间tik,j(2)(这个时间要求车必须是动的,)由其相应的运行速度vik,j(1)和vik,j(2)决定;
12、
13、其中,lk,j(1)为非排队路段的长度;lk,j(2)为排队路段的长度,根据历史最大的排队长度确定;总共有m个站点,k表示其中的第k个站点,k≤m,j为站点k和站点k+1之之间的第j个信号灯,i为车次;
14、车辆在信号灯处的等待时间和到达信号灯停止线的时刻之间的关系用下式表达:
15、
16、
17、其中,为车次i离开站点k的时刻,为绿灯启亮时刻;为绿灯时长;ck,j为信号周期;为车次i在站点k和站点k+1之间的第j个信号灯处的等待时间;为车次i到达站点k和站点k+1之间的第j个信号灯停止线的时刻;
18、智能网联公交车i到达站点k+1的时间离开站点k+1的时间在站点k+1的停留时间tik+1,dwell三者的关系如式(7)所示,在站点的停留时间tik+1,dwell与站点k+1的上车乘客数量和下车乘客数量有关,具体如公式(6):
19、
20、其中,β为每位乘客的平均上下车时间;
21、1.2考虑人工驾驶公交运行状态
22、根据公交线路重叠性特征,当智能网联公交车在两个站点k和k+1之间的非排队路段和排队路段运行时存在多辆人工驾驶公交影响智能网联公交运行车速,进一步影响智能网联公交的运行时间,这将降低智能网联公交运行效率;因此,在描述智能网联公交车运行状态时,需要衡量人工驾驶公交运行不确定性带来的影响:
23、1.2.1非排队路段运行状态描述
24、智能网联公交车在各个路段上的运行时间由其运行速度决定,而运行速度又受路段上的车流状态影响,当智能网联公交车以某一速度行驶时,前方有一辆人工驾驶公交以低于该速度值驾驶,且进一步使智能网联公交将被迫在当前路段上降速行驶的人工驾驶公交被定义为障碍公交;因此,智能网联公交车在路段运行时需判断前方是否存在障碍公交;
25、(1)判断前方有无障碍公交场景
26、如图2所示,假设某一路段的终点距离起点的路程为s3,在出发时刻a0,路段上目标公交1距离起点的路程为s1,运行速度为u1;在a0时刻,公交2距离起点的路程为s2,运行速度为u2,且公交2在目标公交1的前方行驶,根据两者的位置和速度情况,目标公交1到达路段终点位置s3之前存在两种运行状态:
27、场景ⅰ:在目标公交1以速度u1,公交2以速度u2分别运行至路段终点s3的过程中,目标公交1与公交2的距离始终小于两车之间的安全间距s0,公交2对目标公交1的运行状态没有造成影响,目标公交1前方不存在障碍公交,满足如下的公式(8):
28、
29、a5为目标公交1到达终点的时刻,a3为公交2到达终点的时刻;
30、场景ⅱ:在a1时刻,目标公交1行驶至距离公交2的距离为s0处,受前方公交2运行速度的限制,目标公交1无法保持原先的行驶速度u1,将被迫减速并跟随前方公交2运行到路段终点;因此,目标公交1到达路段终点的时间将会增加a4-a2,此时公交2为目标公交1的障碍公交:
31、
32、由上述式(8)和(9)可以判断路段上的人工驾驶公交是否会对智能网联公交的运行状态造成影响,若无障碍公交,则智能网联公交车可保持以某一速度匀速行驶至路段终点;若有障碍公交,则智能网联公交车需在路段的某一位置调整车速;
33、(2)前方无障碍公交场景
34、行驶在非排队路段上的智能网联公交车i前方无障碍公交,则以速度从当前位置匀速行驶至路段j终点,行驶至路段j终点的时间为:
35、
36、(3)前方有障碍公交场景
37、行驶在非排队路段上的智能网联公交车受到障碍公交的速度限制,此时为防止该速度限制引起运行时长的增加,需通过调整智能网联公交车的车速超越前方障碍公交;因此,智能网联公交车在非排队路段上的行驶过程可分为如下三个阶段:
38、阶段1:障碍公交位于智能网联公交车i前方处,且该间距大于车辆最小安全跟驰距离d0,即在的条件下智能网联公交车i以速度匀速行驶,该阶段行驶时间为
39、阶段2:超车过程;智能网联公交车i与前方以速度行驶的障碍公交的的距离时,将自身速度提高至超车车速后开始超车;当智能网联公交车i的位置领先障碍公交后表示超车过程完成,该阶段行驶时间为
40、阶段3:智能网联公交车超越了障碍公交,在到达终点位置之前的剩余路段继续以速度匀速行驶,该阶段行驶时间为
41、上述三个阶段的行驶过程需满足:
42、
43、根据式(11),行驶至终点的时间为:
44、
45、1.2.2节点运行状态描述
46、根据公交线路运行特性,节点是各个信号灯处和完成乘客上下车服务所经过的各站点;
47、(1)信号灯处的运行状态描述
48、智能网联公交车i从排队路段起始位置运行到信号灯停止线的过程中需考虑是否存在人工驾驶公交排队现象;假设在智能网联公交车i从排队路段起始位置运行到信号灯停止线的过程中没有其他的智能网联公交车;
49、用下方的公式(16)判断智能网联公交车i到达排队路段起始位置时刻的信号相位状态为红灯或绿灯;nk,j为智能网联公交车i到达排队路段起始位置时的当前相位剩余红灯时长;为信号灯j的红灯时长;nk,j等于0就是绿灯,否则为红灯;
50、
51、红灯启亮时,到达排队路段的车辆排队队列开始形成;绿灯启亮时,排队队列开始消散;智能网联公交车i检测到前方排队路段的人工驾驶公交车排队车辆数qk,j,因此,人工驾驶公交排队队列消散时间txsk,j根据交通波理论可由式(17)计算得到,指饱和流率;
52、
53、排队路段的行驶时间与是否加入排队队列、信号状态和排队路段运行车速有关系,根据不同的影响因素,排队路段的运行时间主要有以下三种场景:
54、①信号灯j是红灯
55、当信号灯j是红灯,即需要根据信号灯排队队列消散时间判断智能网联公交车i是否加入排队队列,如公式(18)所示,其中,为0和1的整数变量,当智能网联公交车i加入排队队列时,否则
56、
57、lk,j(2)是排队路段的长度;是智能网联公交车i在站点k和站点k+1之间的第j个信号灯之前的排队路段的行驶速度;
58、智能网联公交车i在排队路段的运行时间如公式(19)所示:
59、
60、的终止时刻是车辆通过信号灯停止线的时刻;
61、②信号灯j是绿灯且排队队列正在消散:
62、当信号灯j是绿灯且排队队列正在消散时,nk,j=0且txsk,j≠0,且排队车辆正在消散;智能网联公交车i在排队路段的运行时间如公式(20)和(21)所示:
63、
64、③信号灯j是绿灯且排队队列已经完全消散:
65、当信号灯j是绿灯且排队队列已经完全消散时,nk,j=0且txsk,j=0,排队车辆已经完全消散了;智能网联公交车i在排队路段的运行时间如式(22)所示:
66、
67、针对上述三种情况,根据智能网联公交车i到达信号灯j停止线的时间以及信号相位状态决策是否启动公交信号优先策略,使得智能网联公交通过;
68、
69、rik,j为智能网联公交车i到达站点k和站点k+1之间的第j个信号灯停止线的时刻;
70、式(24)和式(25)决策是否启动公交信号优先策略;
71、
72、其中,为绿灯启亮时刻,为绿灯时长,为信号灯j的红灯时长;指是否启动红灯早断的信号优先策略,若启动信号优先则为1,否则为0;指是否启动绿灯延后的信号优先策略,若启动信号优先则为1,否则为0;
73、式(26)和(27)同时满足的时候表示智能网联公交车i可以在绿灯相位通过信号灯停止线,由智能网联公交车i到达停止线时刻与相位时长的关系式决定;
74、
75、其中,为红灯早断或绿灯延后的时间,指是否启动红灯早断的信号优先策略,若启动信号优先则为1,否则为0;指是否启动绿灯延后的信号优先策略,若启动信号优先则为1,否则为0;
76、(2)站点运行状态描述
77、智能网联公交车i驶到站点k+1的时间为离开站点的时间为站点停留时间为由于站点泊位数限制引起的站点排队等待时间为当小于30s时可忽略不计,为0;如式(28)-(30)所示,j为智能网联公交车i的当前位置至站点k+1之间的信号灯数量;β为每位乘客平均上下车时间,为站点k+1的上车乘客数量,为站点k+1的下车乘客数量;
78、
79、
80、2、智能网联公交分级优化控制模型构建
81、分别从全局优化和局部优化两个角度出发,构建第一级优化控制模型和第二级优化控制模型,并设计优化控制模型的求解算法得到最优的车辆速度控制方案和信号控制方案;首先,不考虑人工驾驶公交的影响,考虑乘客需求、交通信号控制干扰因素建立第一级优化控制模型;但是,由于实际运行中受到人工驾驶公交运行不确定性的干扰,智能网联公交车无法保持第一级优化控制模型输出的最优速度规划方案,将会降低优化效率;基于此,利用第二级优化控制模型来合理调整智能网联公交车在各节点间的运行速度和信号灯优先时长;
82、2.1第一级优化控制模型
83、第一级优化控制模型从全局优化角度出发,不考虑人工驾驶公交的影响,考虑经济性、运行顺序的约束条件,以提升智能网联公交车车头时距均匀性为优化目标,旨在恢复智能网联公交运行线路的规律性:
84、2.1.1目标函数
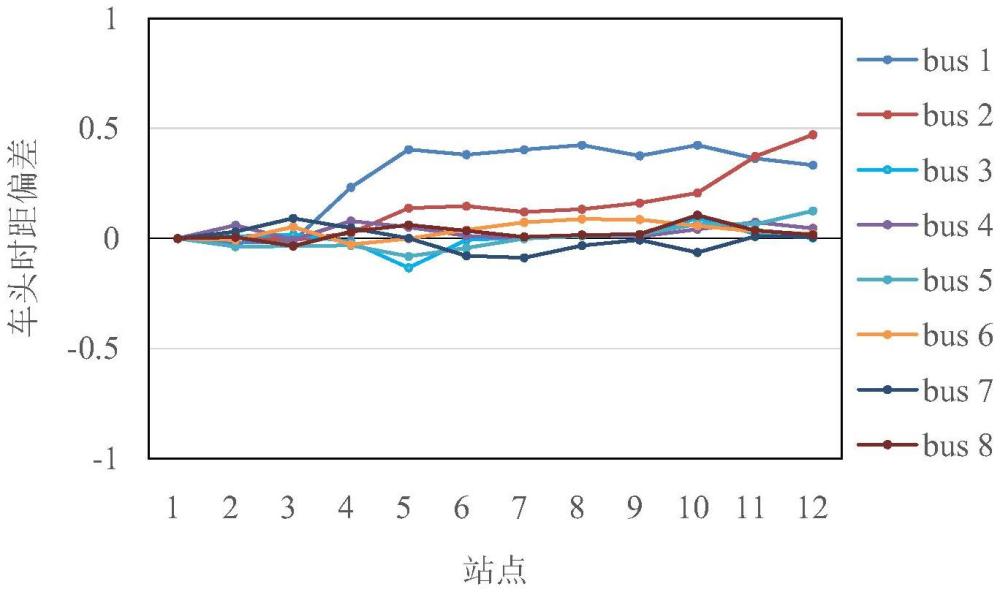
85、在智能网联公交车运行过程中,将车头时距偏离调度车头时距的大小作为衡量车头时距均匀性的一个指标,以连续两辆智能网联公交i和i+1到达同一站点k+1的车头时距与其调度车头时距h的偏离程度最小为优化目标:
86、
87、是智能网联公交i到达站点k+1的时间;
88、2.1.2约束条件
89、(1)车速约束
90、由于车速影响智能网联公交车运行能耗,进一步影响公交企业运营成本;同时,乘客期望公交运行具有一定的平顺性;本发明引入贪婪策略下的运行速度作为确保经济性和平顺性的准则;此处,贪婪策略是指在两个节点之间运行的智能网联公交可以保持经济性和平顺性最高的运行状态,即其运行速度处于节能驾驶速度区间
91、
92、vik,j(1)是智能网联公交i在站点k和站点k+1之间的第j个信号灯之前的非排队路段的行驶速度;vik,j(2)是智能网联公交i在站点k和站点k+1之间的第j个信号灯之前的排队路段的行驶速度;δv是速度控制阈值,为已知量,具体值取决于工况;
93、根据《城市道路交通规划设计规范》规定,排队路段的运行车速应小于等于路段设计车速ρvdesigned;由于排队路段接近信号灯,因此智能网联公交车i在排队路段内的车速vik,j(2)小于等于ρvdesigned;
94、vik,j(2)≤ρvdesigned (33)
95、其中vdesigned是路段设计车速,为已知量,ρ为0.7;
96、综上所述,车速约束应满足下式(34)和(35):
97、max{vmin,veco-δv}≤vik,j(1)≤min{vmax,veco+δv} (34)
98、max{vmin,veco-δv}≤vik,j(2)≤min{vmax,veco+δv,ρvdesigned} (35)
99、其中,vmin和vmax分别为路段的最小和最大的运行车速,均为已知量;
100、(2)运行顺序约束
101、本发明优化模型的目标旨在恢复智能网联公交的线路规律性,因此在实施控制策略时需确保前后智能网联公交车的运行顺序不发生变化。
102、
103、为智能网联公交i离开站点k+1的时刻;
104、2.2第二级优化控制模型
105、第二级优化控制模型从局部优化角度出发,考虑第一级优化控制模型输出方案、人工驾驶公交的影响以及变速超车的约束条件,建立以智能网联公交车进入节点排队队列的次数最小化和节点间运行速度序列与第一级优化控制模型规划车速的偏差最小化为双目标的优化模型,旨在降低人工驾驶公交不确定性带来的影响;
106、2.2.1目标函数
107、(1)节点排队次数
108、由于我国公交专用道具有重复线路特征,智能网联公交到达各节点时需考虑其他线路人工驾驶公交车的运行状态;在站点时,因公交站点停车泊位数有限,容易引发智能网联公交和人工驾驶公交排队进站;在信号灯处受信号相位时长影响,导致智能网联公交进入未消散的人工驾驶公交排队队列;基于此,智能网联公交车容易增加停车次数,产生频繁的加减速行为,降低了乘客的舒适性,且增加了智能网联公交车的运行能耗;本发明以减少智能网联公交车进入各个节点排队队列次数为优化目标,降低人工驾驶公交车带来的影响;
109、①信号灯处排队次数
110、在信号灯处人工驾驶公交排队队列未消散前,智能网联公交车到达队列末尾的现象定义为智能网联公交车加入交叉口排队队列,如图3(a)所示;为智能网联公交车i在站点k和站点k+1之间的第j个信号灯处的排队次数,为0或1;
111、②站点排队次数
112、站点排队是指智能网联公交车和人工驾驶公交同时进站时,受到停车泊位数的限制,位于前方的人工驾驶公交在站点服务时,位于后方的智能网联公交必须在站前排队等待的现象,如图3(b)所示;定义智能网联公交到站点的排队时间大于t1时,智能网联公交将进入排队等待阶段;为0或1的变量,表示智能网联公交车i是否在站点k+1排队等待,1代表排队,0是不排队;本发明假设位于后方的智能网联公交i+1在站点时不会受到前方的智能网联公交i的影响而排队;
113、
114、为由于站点k+1的泊位数限制引起的智能网联公交车i的排队等待时间;
115、综上所述,以智能网联公交进入节点排队队列次数最小为优化目标:
116、
117、(2)运行车速偏差
118、智能网联公交车在各个路段上的运行时间由其运行速度决定,而运行速度又受路段上的车流状态影响;当智能网联公交车以某一速度行驶时,前方有一辆人工驾驶公交以低于该速度值驾驶,且进一步使智能网联公交将被迫在当前路段上降速行驶的人工驾驶公交被定义为障碍公交;因此,智能网联公交车在路段运行时需判断前方是否存在障碍公交;
119、受障碍公交干扰,智能网联公交车在各节点之间的变速超车产生了一个速度序列,以该序列中各个运行速度和第一级优化控制模型输出的运行速度两者的偏差最小为优化目标,实时响应人工驾驶公交动态变化的同时提高了运行平顺性;
120、
121、2.2.2约束条件
122、(1)车速约束
123、车速约束在满足式(34)和(35)的基础上,智能网联公交车i的超车车速需大于障碍公交的车速智能网联公交车i第二级优化控制模型中各非排队路段的运行速度和各排队路段的运行速度应满足下式(40)-(43):
124、
125、
126、
127、δv是速度控制阈值,为已知量,具体值取决于工况;
128、排队路段:是智能网联公交车i在站点k和站点k+1之间的第j个信号灯之前的排队路段的行驶速度;
129、各非排队路段:
130、阶段1:障碍公交位于智能网联公交车i前方处,且该间距大于车辆最小安全跟驰距离d0,即在的条件下智能网联公交车i以速度匀速行驶,该阶段行驶时间为
131、阶段2:超车过程;智能网联公交车i与前方以速度行驶的障碍公交的的距离时,将自身速度提高至超车车速后开始超车;当智能网联公交车i的位置领先障碍公交后表示超车过程完成,该阶段行驶时间为
132、阶段3:智能网联公交车超越了障碍公交,在到达终点位置之前的剩余路段继续以速度匀速行驶,该阶段行驶时间为
133、(2)超车约束
134、由于城市道路的排队路段接近信号灯,无法超车,因此智能网联公交车i超车的第二阶段应在非排队路段的终点前完成:
135、
136、其中,lk,j(1)为在站点k和站点k+1之间的第j个信号灯之前的非排队路段的长度,其余物理量的意义同公式(40)-(43);
137、(3)信号控制约束
138、为了避免公交优先申请冲突现象,每个信号周期内的公交优先申请次数最多为一次,同时要确保红灯早断或绿灯延长后的公交非优先相位的绿灯时长满足各方向行人的安全过街需求:
139、
140、
141、其中,和分别指是否启动红灯早断的信号优先策略和是否启动绿灯延后的信号优先策略,若启动信号优先则为1,否则为0;
142、μk,j和分别为信号灯j公交非优先相位的车流量、饱和流量、绿信比和行人安全过街的时间;为避免公交非优先相位过饱和的最小绿灯时长;
143、t0为车辆启动损失时间;为人行横道长度;vp为行人步行速度,取1.5m/s;ik,j为绿灯间隔时间,设为5s;
144、步骤四:为了提高智能网联公交车运行控制的精度和实时性,本发明基于滚动优化的思想求解智能网联公交分级优化控制模型;在第一级滚动优化的各个触发时刻利用遗传算法(ga)求解第一级单目标优化控制模型,得到智能网联公交的规划速度;
145、在第二级滚动优化的各个触发时刻,利用非支配排序遗传算法(nsga-ii)求解第二级优化控制模型得到最优的速度控制方案和信号优先调整方案,算法流程图见图4。
146、车头时距是相邻两辆车到达同一个公交站点的时间差;调度车头时距是发车时刻表提前制定好的相邻车辆离开站点的时间差,是已知量。
147、公交串车是指相邻的公交车在某一站点的到站时间差值很小或同时到站的现象。
148、本发明的优点:
149、本发明聚焦于公交专用道上传统的人工驾驶公交线路与智能网联公交线路异构的场景,旨在解决智网联公交串车以及站点和信号灯排队的问题。本发明建立的智能网联公交运行分级优化控制模型考虑人工驾驶公交运行不确定性的条件下输出最优速度控制方案和信号优先方案,提高车头时距的均匀性,减少进入节点排队的次数。本发明为智能网联公交公司高效运行提供新思路,对促进智能网联公交从特定简单道路向复杂道路的规模化运行具有重要意义。
- 还没有人留言评论。精彩留言会获得点赞!