危险区域的船舶追越碰撞预警方法及系统与流程
本发明涉及航海,尤其涉及危险区域的船舶追越碰撞预警方法及系统。
背景技术:
1、随着航运业的快速发展,海上交通日益繁忙,尤其在港口、水道或船舶密集的海域,船舶之间的碰撞风险显著增加。有效的追越碰撞预警系统可以帮助船舶提前发现潜在的碰撞风险,并提供适当的避让方案,从而降低事故发生的概率,提高海上交通的安全性。
2、现有技术(中国发明专利,cn117132012b,名称:一种预测冲突危险区的多船避碰方法、电子设备和存储介质)通常采用基于规则的方法进行船舶避碰,如使用预设的国际海上避碰规则或快速扩展随机树(rrt)算法。这些方法通常以船舶之间的相对位置和速度为主要依据,利用固定的规则来确定避让策略。但这类方法存在以下缺陷:
3、无法动态适应复杂海上环境中的突发情况,预设规则过于简单,难以应对多船避碰的复杂局面;路径规划主要关注局部冲突的最小化,可能导致在解决一个风险后,船舶陷入新的碰撞风险中,缺乏全局性的优化能力;难以在实时应对复杂多变的海上环境下进行快速调整和优化。
技术实现思路
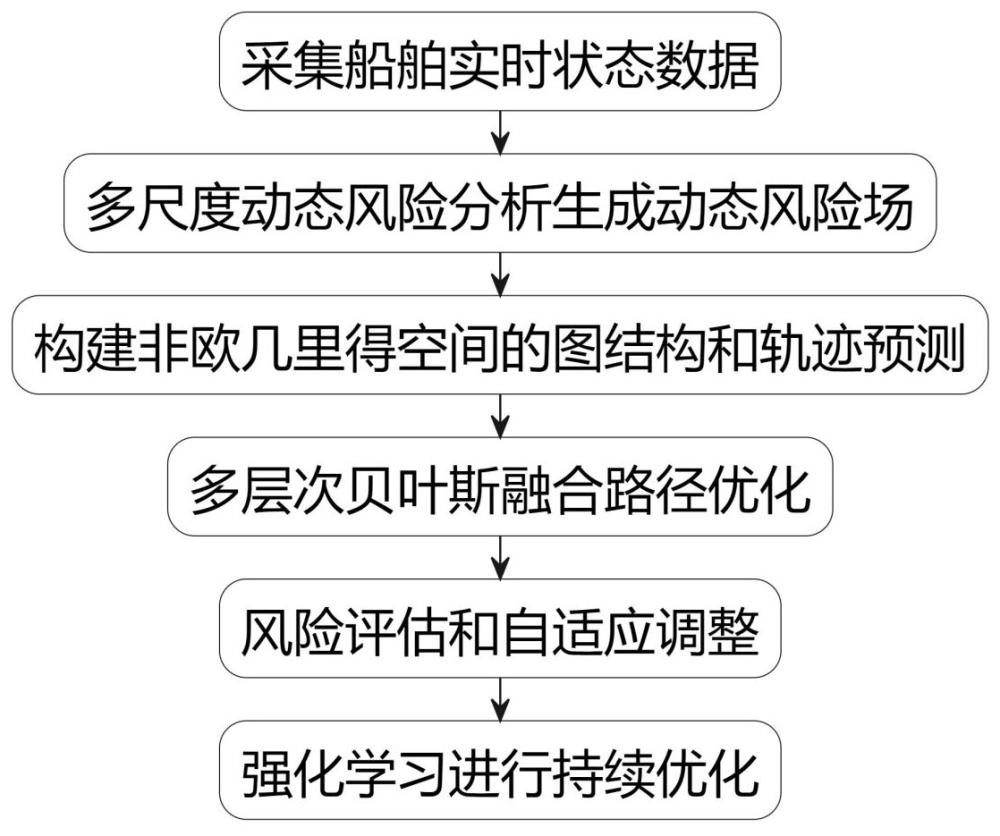
1、针对上述现有技术存在的诸多问题,本发明提供危险区域的船舶追越碰撞预警方法及系统,本发明通过采集船舶的实时状态数据,采用多尺度动态风险分析和非欧几里得空间的轨迹预测技术,结合多层次贝叶斯融合方法进行风险评估和路径优化,并利用强化学习进行持续优化。本发明能够精确预测船舶未来的路径变化,动态调整避让策略,显著提升了海上交通安全性。
2、一种危险区域的船舶追越碰撞预警方法,包括以下步骤:
3、采集船舶的实时状态数据,包括位置、速度、加速度、航向以及环境信息,对所述船舶的实时状态数据进行数据预处理,得到融合传感器数据;基于融合传感器数据,采用多尺度分析生成局部尺度风险场数据和全局尺度风险场数据,并通过动态融合形成实时更新的多尺度动态风险场数据,用于反映当前和预测未来的风险分布;
4、基于多尺度动态风险场数据,构建非欧几里得空间的图结构,利用图神经网络对船舶未来的轨迹进行预测,生成初始非欧几里得轨迹预测数据;结合船舶的操作行为数据进行双向耦合修正,得到耦合轨迹预测数据;基于耦合轨迹预测数据,进行风险传导路径分析和自适应路径优化,生成自适应优化路径数据;通过多层次贝叶斯融合方法将自适应优化路径数据与耦合轨迹预测数据进行融合,生成最终贝叶斯路径数据;
5、基于最终贝叶斯路径数据和非欧几里得风险传导数据,评估并划分风险等级;记录每次风险响应的执行反馈数据,并通过强化学习算法对反馈数据进行自我学习和持续优化。
6、优选的,多尺度分析生成局部尺度风险场数据和全局尺度风险场数据包括:
7、通过卷积神经网络对融合传感器数据的局部区域进行扫描,以提取船舶之间的距离变化和速度变化的局部特征信息,生成局部尺度风险场数据;利用长短期记忆网络对融合传感器数据的历史时序进行建模,识别船舶状态随时间变化的趋势,生成全局尺度风险场数据。
8、优选的,通过动态融合形成实时更新的多尺度动态风险场数据包括:
9、将局部尺度风险场数据和全局尺度风险场数据转换为同一单位的风险强度表示形式,并通过加权融合生成多尺度动态风险场数据,其中风险强度的计算公式为:
10、
11、其中,表示多尺度动态风险场数据的风险强度;为局部尺度风险场数据的风险强度;为全局尺度风险场数据的风险强度;和分别为局部尺度和全局尺度的权重系数,且满足,权重系数根据船舶的速度和相对位置动态调整。
12、优选的,构建非欧几里得空间的图结构包括:
13、将多尺度动态风险场数据中的船舶状态作为节点的属性,包括船舶的实时位置、速度和加速度信息;根据船舶之间的相对距离和相对速度确定节点之间的边权重值,边权重值根据以下公式计算:
14、
15、其中,表示节点和节点之间的边权重;为节点和节点之间的相对距离;为调节参数;用于控制边权重的非线性变化程度;为偏移参数;用于调节边权重的阈值。
16、优选的,双向耦合修正包括:
17、根据船舶的操作行为数据对初始非欧几里得轨迹预测数据中的节点位置和边权重进行修正,操作行为数据包括航向变化率、加速度变化率和转向速度,通过计算操作行为数据对节点位置和边权重的影响,生成耦合轨迹预测数据,其中修正过程采用双向计算,即既考虑船舶的自身行为变化,又结合其他船舶行为对预测结果的干扰。
18、优选的,风险传导路径分析包括:
19、基于耦合轨迹预测数据中的节点和边权重信息,使用图神经网络的风险传播算法对各路径节点的风险传导强度进行计算,风险传导强度的计算公式为:
20、
21、其中,表示节点的风险传导强度;为节点对节点的边权重;为节点的风险强度,计算得到的风险传导路径数据用于识别高风险区域。
22、优选的,自适应路径优化包括:
23、采用变分自适应梯度算法对风险传导路径数据中每个路径点的转向角度和平滑度进行迭代调整,以更新路径点的位置,优化后的路径根据路径点的局部梯度信息和全局风险分布生成自适应优化路径数据。
24、优选的,多层次贝叶斯融合方法包括:
25、设定多个贝叶斯层次,每个贝叶斯层次的融合权重依据具体的风险优先级和行为特征优先级进行设定,依次对自适应优化路径数据和耦合轨迹预测数据进行逐层加权融合,以逐步形成最终贝叶斯路径数据。
26、优选的,强化学习算法用于对反馈数据进行自我学习和持续优化包括:
27、通过深度q网络算法训练风险响应数据,风险响应数据包括执行后的安全性指标、响应时间和路径调整幅度,深度q网络算法根据风险响应数据的正负回报,调整路径规划参数和风险响应策略,以实现对复杂海上环境的动态适应性。
28、一种用于实施所述的危险区域的船舶追越碰撞预警方法的系统,所述系统包括:
29、多模态传感器模块,用于采集船舶的实时状态数据,包括位置、速度、加速度、航向以及环境信息,并对所述船舶的实时状态数据进行数据预处理,以得到融合传感器数据;
30、风险场生成模块,用于基于融合传感器数据,采用多尺度分析生成局部尺度风险场数据和全局尺度风险场数据,并通过动态融合形成实时更新的多尺度动态风险场数据,以反映当前和预测未来的风险分布;
31、图结构构建模块,用于基于多尺度动态风险场数据构建非欧几里得空间的图结构,并利用图神经网络对船舶未来的轨迹进行预测,以生成初始非欧几里得轨迹预测数据;
32、双向耦合修正模块,用于结合船舶的操作行为数据对初始非欧几里得轨迹预测数据进行双向耦合修正,以生成耦合轨迹预测数据;
33、风险传导与路径优化模块,用于基于耦合轨迹预测数据进行风险传导路径分析和自适应路径优化,以生成自适应优化路径数据;
34、贝叶斯融合模块,用于通过多层次贝叶斯融合方法将自适应优化路径数据与耦合轨迹预测数据进行融合,以生成最终贝叶斯路径数据;
35、风险响应与反馈模块,用于基于最终贝叶斯路径数据和非欧几里得风险传导数据评估并划分风险等级,记录每次风险响应的执行反馈数据,并通过强化学习算法对反馈数据进行自我学习和持续优化。
36、相比于现有技术,本发明的优点及有益效果在于:
37、本发明通过多尺度动态风险场分析技术手段,实现了对局部和全局风险的综合评估,显著提升了对潜在碰撞风险的识别精度;相比现有技术,本发明引入多尺度分析以动态融合局部和全局风险,能够准确反映船舶当前的风险状态,并对未来的风险分布进行预测;
38、本发明通过非欧几里得空间的图神经网络轨迹预测,实现了船舶未来路径的精确估计,提高了路径规划的可靠性;传统方法通常局限于欧几里得空间中的路径计算,而本发明采用图结构进行轨迹预测,能够更好地反映复杂海上环境的非线性特征;
39、本发明通过多层次贝叶斯融合方法,优化了路径数据的多层次融合效果,显著提升了系统对不同风险优先级的处理能力;这一技术手段使得路径规划既能应对局部突发情况,又能兼顾全局的风险分布;
40、本发明通过强化学习算法的持续优化,实现了系统对复杂海上环境的自适应能力的提升;利用深度q网络算法对反馈数据进行自我学习,不断调整风险响应策略,从而提高系统的动态适应性。
- 还没有人留言评论。精彩留言会获得点赞!