一种无人值守高速公路的车辆引导方法及系统与流程
本发明涉及智能交通,尤其涉及一种无人值守高速公路的车辆引导方法及系统。
背景技术:
1、随着全球高速公路网络的迅速扩展,交通流量也不断增长。为了保证高速公路上的车辆安全、有序通行,传统的车辆引导通常依赖人工进行指挥和管理,尤其是在拥堵路段和服务区等高流量区域。然而,人工引导存在诸多缺陷,如反应速度慢、监控盲区多、难以实现全时段、全方位的车辆引导等问题,导致事故频发和交通堵塞现象严重。
2、近年来,随着智能交通技术的进步,无人值守技术开始应用于交通管理领域,尤其是在高速公路场景下,通过摄像头、雷达等设备对道路进行实时监控、车辆行为分析,并结合大数据和人工智能技术对交通流进行智能调控。
3、但是现有的监控系统多依赖图像识别,对于复杂场景下的车辆行为识别准确率较低;在一些关键节点附近,现有的划分方法容易导致某些区域交通压力集中,无法实现精确化分流。
技术实现思路
1、为了克服高速公路精确化分流困难的缺点,本发明提供了一种无人值守高速公路的车辆引导方法及系统。
2、技术方案:一种无人值守高速公路的车辆引导方法,包括以下步骤:
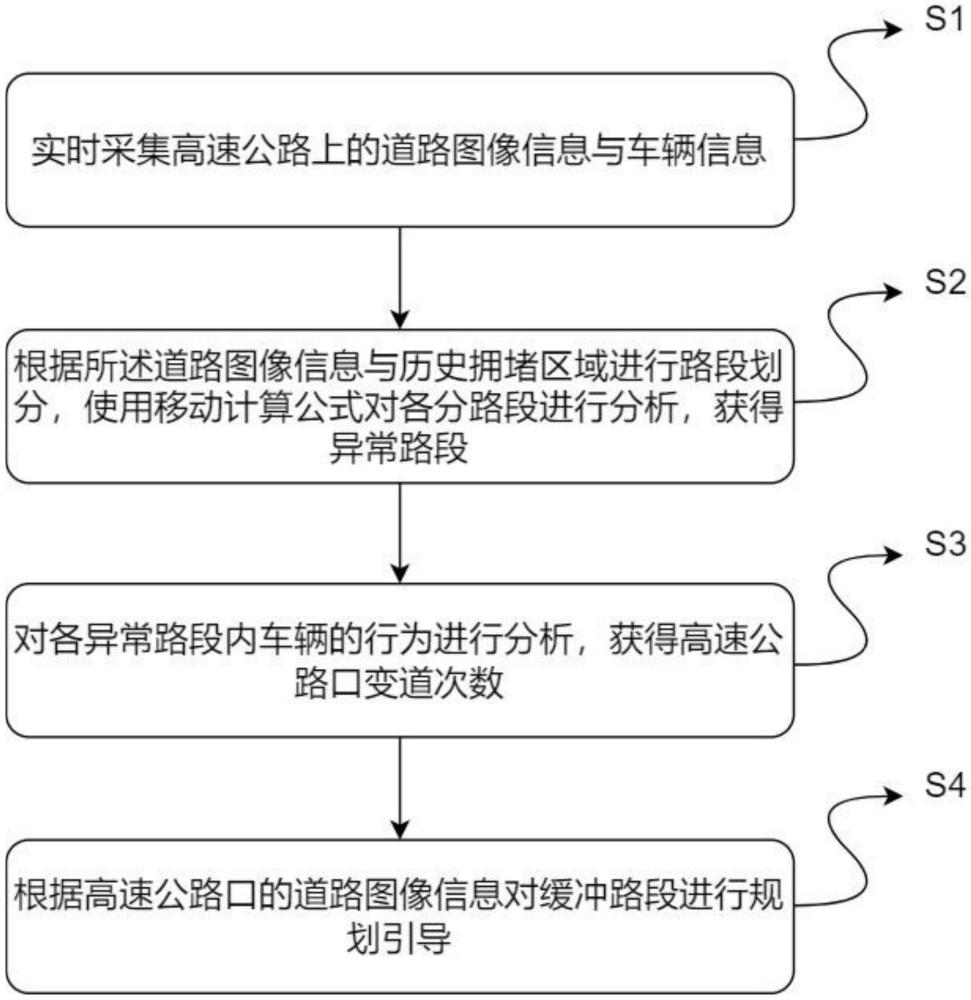
3、s1:实时采集高速公路上的道路图像信息与车辆信息;
4、s2:根据所述道路图像信息与历史拥堵区域进行路段划分,使用移动计算公式对各分路段进行分析,获得异常路段;
5、s3:对各异常路段内车辆的行为进行分析,获得高速公路口变道次数;
6、s4:根据高速公路口的道路图像信息对缓冲路段进行规划引导。
7、优选地,所述实时采集高速公路上的道路图像信息与车辆信息,包括:基于高速公路摄像头,获取道路图像信息与车辆图像,并对图像进行图像增强、尺度缩放、归一化的预处理,并使用高斯滤波进行图像降噪;通过雷达测速,获取车辆的速度信息。
8、优选地,所述根据所述道路图像信息与历史拥堵区域进行路段划分,使用移动计算公式对各分路段进行分析,获得异常路段,包括:对高速公路的路段进行划分,将道路的风险区域按照高速出入口、分叉口、服务区、历史拥堵区域的划分节点进行路段划分,将各高速出入口与各分叉口作为划分节点,将各服务区与各历史拥堵区域第一预设距离的边界节点作为划分节点,并根据所述划分节点对高速公路进行划分,获得各分路段。
9、优选地,所述将各服务区与各历史拥堵区域第一预设距离的边界节点作为划分节点,包括:其中选定一个服务区或一个历史拥堵区域,以每个选定的服务区或历史拥堵区域为中心点,围绕每个中心点设定第一预设距离,识别位于所述第一预设距离边界上的所有节点,将所述边界上的节点定义为划分节点;其中,所述历史拥堵区域是指在预设时间段内发生交通拥堵次数超过第一预设阈值的区域。
10、优选地,所述使用移动计算公式对各分路段进行分析,获得异常路段,包括:
11、识别各分路段内的转弯节点并获得所述转弯节点的角度,当转弯节点角度大于角度阈值时,将该转弯节点作为开始点,沿着路线方向直至寻找到小于等于角度阈值的转弯节点,将此转弯节点作为终点,根据不同分路段的开始点与终点,获得各分路段的转弯路段及转弯路段比例;
12、根据所述各分路段的转弯路段比例与各车道的历史交通量,使用移动计算公式获得各分路段的移动值,并根据车辆密度与移动值获取异常路段。
13、优选地,所述根据所述各分路段的转弯路段比例与各车道的历史交通量,使用移动计算公式获得各分路段的移动值,并根据车辆密度与移动值获取异常路段,包括:当分路段的车辆密度大于等于预设密度阈值或分路段车辆的总移动值小于预设移动值时,则将该分路段作为异常路段;其中移动计算公式为:
14、
15、其中,l为移动值,m为车道数量,ni为第i个车道上的车辆数量,vij为第i车道上第j辆车的速度,wi为第i车道的权重,根据车道的交通量分配权重,σ为道的转弯路段速度影响系数,r为表示各分路段的转弯路段比例。
16、优选地,所述对各异常路段内车辆的行为进行分析,获得高速公路口变道次数,包括:将实时采集的各异常路段内车辆信息输入至车辆分析模块,获得各车辆的车辆行为,并根据所述各车辆的历史车辆行为次数与行为对应表,获得高速公路口变道次数。
17、优选地,所述将实时采集的各异常路段内车辆信息输入至车辆分析模块,获得各车辆的车辆行为,包括:车辆分析模块采用cnn结合lstm的模型,通过多层卷积操作从输入的车辆轨迹图像或雷达图像中提取空间特征,对车辆在不同时刻的位置信息进行卷积运算,生成高层特征图,并将所述高层特征图接输入池化层,获取空间特征,将所述空间特征与车辆的动态参数数据进行结合,获得时间序列,通过多个lstm层级处理输入序列,获得车辆行为;并将所述车辆行为放入对应车辆的高速行为序列中;其中,使用softmax分类器作为分类函数,并基于梯度下降算法和反向传播算法对模型参数进行优化,使用验证数据集对模型进行评估;其中,车辆行为包括主动避让、主动插队或正常行驶行为。
18、优选地,所述根据高速公路口的道路图像信息对缓冲路段进行规划引导,包括:将高速公路口区域进行划分,获得第一缓冲区与第二缓冲区,并对第一缓冲区进行划分获得etc收费道路、人工收费道路和混用收费道路;
19、对第二缓冲区的车辆进行引导,若车辆为etc收费车辆时,将该车辆引导至etc收费道路和混用收费道路;若车辆为人工收费车辆时,将该车辆引导至人工收费道路和混用收费道路;
20、对第一缓冲区的车辆进行引导,获取第一缓冲区内各车辆的高速公路口变道次数;并根据所述各车辆的高速公路口变道次数,对各车辆在第一缓冲区内变道进行引导;
21、当拥堵现象发生时,获取第一缓冲区内各车辆的高速公路口变道次数,并对高速公路口变道次数大于等于n次的车辆,进行变道引导。
22、优选地,一种无人值守高速公路的车辆引导系统,包括:
23、数据采集模块,用于根据高速公路的摄像头与雷达,获取道路图像信息与车辆图像,并对数据进行预处理;
24、路段划分模块:根据高速出入口、分叉口、服务区和历史拥堵区域进行高速公路的路段划分,生成分路段;
25、异常检测模块:使用移动计算公式,结合车辆密度和转弯路段比例,分析每个分路段的异常情况;
26、车辆行为检测模块:使用cnn结合lstm的模型,通过卷积和时间序列分析,识别车辆的行为,包括主动避让、主动插队和正常行驶;
27、车辆行为分类模块:基于车辆的历史行为数据,分类车辆在高速公路口的切换行为次数;
28、缓冲区划分模块:对高速公路口区域划分为第一缓冲区和第二缓冲区,并进一步将第一缓冲区划分为etc收费道路、人工收费道路和混用收费道路;
29、车辆引导模块:根据车辆的etc收费身份或人工收费车辆身份,对车辆进行引导,分别引导至etc收费道路、人工收费道路或混用收费道路中的道路;
30、切换次数监控模块:监控车辆在缓冲区内的切换次数,当拥堵发生时,对切换次数大于n次的车辆进行道路切换引导。
31、有益效果:本发明通过利用智能交通技术,结合实时采集的道路和车辆数据,自动化分析高速公路路况及车辆行为,实现了无人值守下的高速公路车辆引导功能,减少了人工操作的依赖性,极大地提升了引导的智能化水平;
32、通过道路图像信息结合历史拥堵区域数据,本发明能够有效识别交通异常路段,特别是通过移动计算公式与车辆密度的结合,可以精准锁定交通瓶颈区域,实时调整引导策略,提升异常处理效率;
33、引入cnn和lstm相结合的深度学习模型,对异常路段内车辆的行为进行动态分析。该模型不仅能够高效识别车辆的轨迹和行为模式,还能将其与历史行为记录相结合,进一步提高了异常车辆识别的准确性,确保车辆的合理引导;
34、基于车辆切换次数与缓冲路段的实时划分,本发明能够根据实际路况动态调整车辆在缓冲区内的行驶路线,有效避免拥堵和资源浪费。当车辆在高速公路口的切换次数高时,系统能够优先对这些车辆进行引导,减少缓冲区内的交通压力。
- 还没有人留言评论。精彩留言会获得点赞!