复杂城市环境下的多层次低空航路网构建方法与流程
本发明涉及低空航路构建,尤其涉及复杂城市环境下的多层次低空航路网构建方法。
背景技术:
1、随着无人机技术的快速发展,低空飞行器在城市环境中的应用日益广泛。然而,复杂的城市环境给低空飞行带来了诸多挑战,包括高楼林立、人口密集、气象条件复杂以及通信信号干扰等问题。为了确保低空飞行的安全性和效率,建立一个完善的低空航路网成为了当前研究的热点。目前,一些研究者提出了基于障碍物voronoi图和a*算法的公共航路网规划方法,这种方法能够在一定程度上解决复杂环境下的路径规划问题。
2、然而,随着5g技术的普及和低空公共航路的复杂化,保证覆盖率成为了一个新的挑战。从时间和空间的角度来看,现有的航路网规划方法在处理大规模5g基站和复杂低空公共航路时存在不足。此外,城市地表环境的复杂性也给航路网规划带来了困难。由于缺乏地理信息和低空航路支持,当前的无人机交通管理系统(utm)在处理复杂城市环境时面临着巨大挑战。
3、为了解决这些问题,一些研究者提出了迭代构建城市低空无人机航路网的方法。这种方法试图通过多次迭代来优化航路网,以适应复杂的城市环境。然而,这种方法仍然存在一些局限性,例如在处理动态变化的环境和多种类型飞行器的需求方面还有待改进。
4、综上所述,现有技术在处理复杂城市环境下的低空航路网规划时仍存在技术缺陷,主要表现在难以保证全面覆盖、缺乏对复杂地表环境的充分考虑,以及在处理多种类型飞行器需求和动态环境变化方面的不足,这些问题限制了低空航路网在复杂城市环境中的实际应用和效果。
技术实现思路
1、有鉴于此,本发明提出了复杂城市环境下的多层次低空航路网构建方法,以解决现有技术在处理复杂城市环境、多源数据整合、多层次空域划分以及路径优化等方面的不足,从而实现安全、高效、灵活的低空飞行管理。
2、本发明的技术方案是这样实现的:本发明提供了复杂城市环境下的多层次低空航路网构建方法,包括:
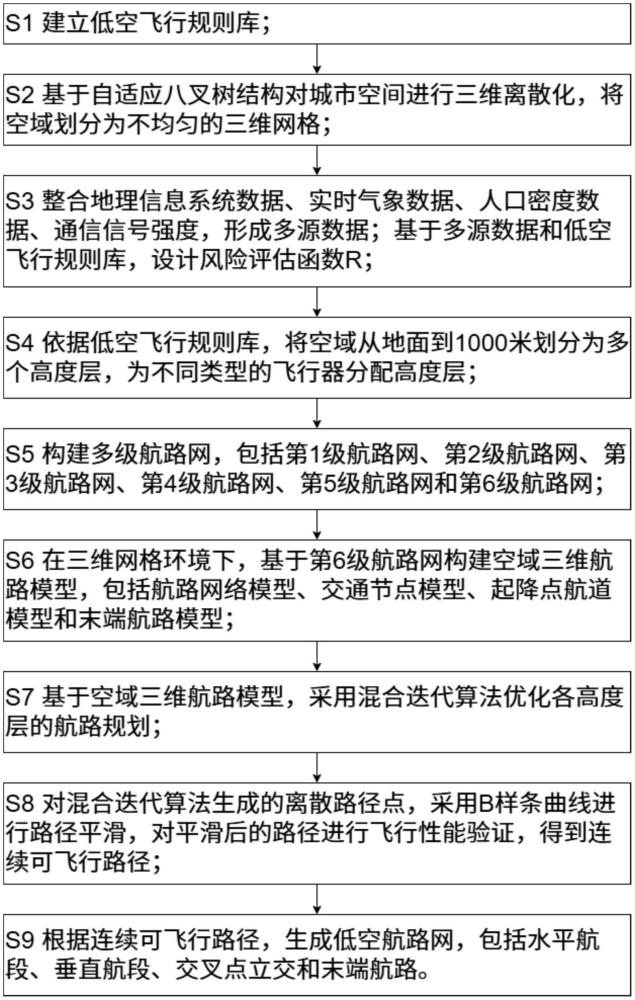
3、s1建立低空飞行规则库;
4、s2基于自适应八叉树结构对城市空间进行三维离散化,将空域划分为不均匀的三维网格;
5、s3整合地理信息系统数据、实时气象数据、人口密度数据、通信信号强度,形成多源数据;基于多源数据和低空飞行规则库,设计风险评估函数r;
6、s4依据低空飞行规则库,将空域从地面到1000米划分为多个高度层,为不同类型的飞行器分配高度层;
7、s5构建多级航路网,包括第1级航路网、第2级航路网、第3级航路网、第4级航路网、第5级航路网和第6级航路网;
8、s6在三维网格环境下,基于第6级航路网构建空域三维航路模型,包括航路网络模型、交通节点模型、起降点航道模型和末端航路模型;
9、s7基于空域三维航路模型,采用混合迭代算法优化各高度层的航路规划;
10、s8对混合迭代算法生成的离散路径点,采用b样条曲线进行路径平滑,对平滑后的路径进行飞行性能验证,得到连续可飞行路径;
11、s9根据连续可飞行路径,生成低空航路网,包括水平航段、垂直航段、交叉点立交和末端航路。
12、在上述方案的基础上,优选的,低空飞行规则库包括:
13、飞行高度限制:规定在特定区域内飞行的最低高度;
14、航线规定:规定飞行器在特定区域内的航线;
15、飞行速度限制:规定飞行器在特定区域内的最高飞行速度;
16、空中交通管制:设立空中交通管制系统,以监管低空飞行的交通秩序;
17、紧急情况处理:制定应对紧急情况的处理程序;
18、违规处罚:对违反交通规则的飞行器进行处罚。
19、在上述方案的基础上,优选的,步骤s4中,高度层划分包括:
20、0-20m,近地空域;20-50m,消费级飞行器隔离空域;50-120m,消费级飞行器适飞空域;120-150m,轻、小飞行器隔离空域;150-200m,轻、小飞行器适飞空域;200-230m,中型飞行器隔离空域;230-300m,中型飞行器适飞空域;300-400m,大型飞行器隔离空域;400-600m,大型飞行器适飞空域;600-700m,载人航空器超高速隔离空域;700-1000m,载人航空器超高速适飞空域。
21、在上述方案的基础上,优选的,步骤s5中,第1级航路网为基于地面路网生成的初始航路网;第2级航路网为以第1级航路网范围为基础,迭代正约束地理要素的航路网;第3级航路网为以第2级航路网为基础,迭代负约束地理要素的航路网;第4级航路网为以第3级航路网为基础,迭代飞行器交通需求的动态航路网;第5级航路网为针对第4级航路网进行迭代仿真飞行测试,并修正后的航路网;第6级航路网为在第5级航路网基础上,迭代实际飞行测试的航路网。
22、在上述方案的基础上,优选的,航路网络模型包括:
23、构建椭圆柱形的固定分层航路管道,形成主干航路网络,包括飞行航道宽度、高度和缓冲区;
24、交通节点模型包括:
25、将航路网络抽象为交通节点和飞行航路的集合体,将交通节点构建为环状螺旋式立交形式,在交叉口范围内设置多层回旋飞行匝道,匝道外设同层变速航道;
26、起降点航道模型包括:
27、采用锥形空间结构,连接地面起降点与空中航路网络;
28、末端航路模型包括:
29、连接主干航路网络与地面起降设施、迫降带和相关保障设施;
30、其中,末端航路模型与主干航路网络通过环状螺旋式立交进行衔接,该立交为只准右转通行交叉口。
31、在上述方案的基础上,优选的,步骤s7包括:
32、s71根据飞行器的任务信息计算优先值,基于优先值为飞行器赋予优先级,根据优先级将飞行器分为高优先级和中低优先级两类;
33、s72对高优先级飞行器采用第一优化算法进行航路规划;
34、s73对中低优先级飞行器采用第二优化算法进行航路规划;
35、其中,在航路规划过程中,考虑空域三维航路模型的约束条件,包括:
36、在航路网络模型中搜索主要飞行路径,遵循椭圆柱形的固定分层管道结构;
37、利用交通节点模型实现不同高度层和航路之间的转换,采用环状螺旋式立交结构;
38、通过起降点航道模型规划起飞和降落阶段的路径,使用锥形空间结构;
39、使用末端航路模型完成任务区域的精确导航,连接主干航路网络与具体任务地点。
40、在上述方案的基础上,优选的,步骤s72包括:
41、s721将高优先级飞行器按照优先级从高到低排序;
42、s722按照优先级顺序,依次为每个高优先级飞行器规划路径,包括:
43、使用全局路径规划算法在空域三维航路模型中寻找从起点到终点的最快路径,同时考虑飞行时间和风险评估函数r;
44、考虑已规划的高优先级飞行器的轨迹和时间调度,评估当前高优先级飞行器的路径与已规划高优先级飞行器之间的潜在冲突;
45、若存在冲突风险,调整当前高优先级飞行器的飞行计划,包括时间调整、高度层调整和路径重规划;
46、在满足所有约束条件的前提下,选择预期到达时间最短的优化路径;
47、s723记录当前高优先级飞行器的规划路径和时间表,更新该高优先级飞行器轨迹信息;
48、s724重复步骤s722-723,直至所有高优先级飞行器的路径规划完成。
49、在上述方案的基础上,优选的,第一优化算法的路径优化目标函数如下:
50、
51、r(x,y,z,t)=ω1·o(x,y,z)+ω2·p(x,y,z,t)+ω3·w(x,y,z,t)+ω4·t(x,y,z,t)
52、式中,j1为总路径代价,e1(t)为高优先级飞行器的能量消耗函数,λ为风险权重因子,t0和tf为起始和结束时间,(x(t),y(t),z(t))为飞行器在时间t的空间位置,r(x,y,z,t)表示在空间位置(x,y,z)和时间t的综合风险值,o(x,y,z)为障碍物风险函数,p(x,y,z,t)为人口密度风险函数,w(x,y,z,t)为气象风险函数,t(x,y,z,t)为通信风险函数,ω1、ω2、ω3、ω4为动态调整的权重系数。
53、在上述方案的基础上,优选的,步骤s73包括:
54、s731根据所有中低优先级飞行器的任务需求、起点和终点,建立多目标路径规划模型,优化目标包括飞行距离、能量消耗和航路拥堵度;
55、s732考虑空域三维航路模型的约束条件,以及已规划高优先级飞行器的路径和时间调度,建立避撞约束和空域可达性约束;
56、s733对中低优先级飞行器进行路径迭代优化,包括:
57、将飞行路径表示为基于航路节点序列的染色体编码;基于最短路径算法生成初始种群;
58、以多目标优化函数作为适应度函数,综合考虑飞行距离、能量消耗和航路拥堵度;
59、采用精英保留策略进行选择,使用部分映射交叉方法,结合自适应变异概率进行优化;
60、s734在迭代达到预设条件后,输出最优路径序列,完成中低优先级飞行器的路径规划。
61、在上述方案的基础上,优选的,第二优化算法中的多目标优化函数如下:
62、j2=w1·d+w2·e2+w3·c
63、
64、式中,j2为综合代价函数,d为飞行距离,dist(ni,ni+1)表示节点ni和ni+1之间的空间距离,e2为能量消耗,e(ni,ni+1)为飞行器从节点ni到ni+1所消耗的能量,c为航路拥堵度,γ(ni)为节点ni处的航路拥堵度评价函数,n为节点数量,w1、w2、w3为权重系数;
65、航路拥堵度评价函数γ(ni)的计算公式如下:
66、
67、式中,q(ni)为节点ni在单位时间内的飞行器通过数量,qmax为节点ni的最大通过能力,s(ni)为节点ni处飞行器的平均尺寸,smax为飞行器尺寸的最大值,u(ni)为节点ni处的累积优先级惩罚,umax为优先级惩罚的最大值。
68、本发明相对于现有技术具有以下有益效果:
69、(1)通过综合考虑空间离散化、多源数据整合、多层次空域划分以及路径优化等方面,实现了安全、高效、灵活的低空飞行管理。该方法有效解决了现有技术在处理复杂城市环境、保证全面覆盖、适应环境多样性和动态性等方面的不足,显著提高了低空航路网在复杂城市环境中的实际应用效果;
70、(2)通过整合地理信息系统数据、实时气象数据、人口密度数据和通信信号强度等多源数据,并结合低空飞行规则库设计风险评估函数。这种综合考虑的方法提高了风险评估的准确性和全面性;
71、(3)提出了基于优先级的混合迭代算法,分别对高优先级和中低优先级飞行器进行航路规划。这种差异化的处理方法有效平衡了不同类型飞行器的需求,提高了整体航路网的利用效率,同时保证了高优先级任务的及时完成;
72、(4)采用的第一优化算法通过考虑能量消耗和综合风险值,实现了高优先级飞行器的最优路径规划。这种方法不仅保证了高优先级任务的及时完成,还在保障飞行安全的同时最小化了能源消耗,提高了高优先级飞行任务的整体效率;(5)第一优化算法中引入的动态调整权重系数机制,使得系统能够根据实时情况灵活调整障碍物风险、人口密度风险、气象风险和通信风险的重要性。这种自适应机制显著提高了航路规划的灵活性和适应性,能够更好地应对复杂多变的城市飞行环境;
73、(6)第二优化算法采用多目标优化函数,综合考虑飞行距离、能量消耗和航路拥堵度,实现了中低优先级飞行器的群体优化。这种方法不仅平衡了单个飞行器的性能需求,还考虑了整体航路网的负载均衡;
74、(7)第二优化算法中引入的拥堵惩罚机制和航路拥堵度评价函数,使得系统能够动态调整飞行路径,避开拥堵区域。这种机制有效减少了航路拥堵的发生,提高了中低优先级飞行器的整体通行效率,同时也为高优先级飞行器预留了更多的航路资源。
- 还没有人留言评论。精彩留言会获得点赞!