一种考虑物理约束的车辆轨迹重构方法
本发明属于交通感知与大数据分析领域,具体涉及一种考虑物理约束的车辆轨迹重构方法。
背景技术:
1、车辆轨迹包含丰富的交通流时空信息,这对于交通流模拟建模、交通信号优化以及交通运行状态评估具有重要意义。获取完整的车辆轨迹并分析其时空信息在描述交通流的运行状态方面起着关键作用。因此,如何在有限且部分连续的轨迹数据基础上补充更多的轨迹信息,已成为近年来的研究热点。
2、当前的车辆轨迹检测设备可以根据其运动特性分为两类:固定检测器(如自动车辆识别和环形检测器)和移动检测器(如探测车辆和网联自动驾驶车辆)。固定检测器安装在特定位置,能够进行较高精度的车辆点检测,但无法记录车辆轨迹的运动信息。移动检测器则通过安装在车辆上的感知和定位设备,可在一定范围内获取车辆及其他交通参与者的运动数据。探测车辆能够提供自身的位置、加速度和速度特征;然而,由于其低普及率,难以全面重构其他车辆的缺失轨迹。相比之下,网联自动驾驶车辆可以收集其探测范围内的车辆信息,产生的轨迹数据量是探测车辆的数倍。充分利用这些信息有助于重构高精度的车辆轨迹。凭借这些优势,网联自动驾驶车辆在跟车行为仿真、基本图的建立以及超车行为研究方面取得了进展。然而,由于其普及率较低,网联自动驾驶车辆只能提供碎片化的观测数据,而非完整的交通轨迹信息。
3、当前轨迹重构方法主要分为基于数据驱动的方法和基于交通流理论的方法。对于基于数据的方法,重点在于根据轨迹数据的特征推断轨迹点的时空分布模式。在轨迹重构研究中,基于数据的方法可以分为几类:统计模型(如最大似然估计、粒子滤波)、插值方法(如线性插值、hermite插值、lagrange插值、自适应平滑样条、局部加权多项式回归)以及基于机器学习的方法。尽管基于机器学习的方法在短期轨迹预测中表现优异,但随着待重构轨迹段长度的增加,其预测误差往往会增加。基于数据的方法不考虑交通流效应,而基于交通流理论的方法则利用交通流模型来估计车辆轨迹的时空分布。交通流理论包含多种方法,例如变分理论、基于安全的理论、跟驰模型、超车行为以及基本图的建立等。基于交通流理论的方法具有较好的驾驶行为解释性,但是重构精度没有基于数据驱动的高。
技术实现思路
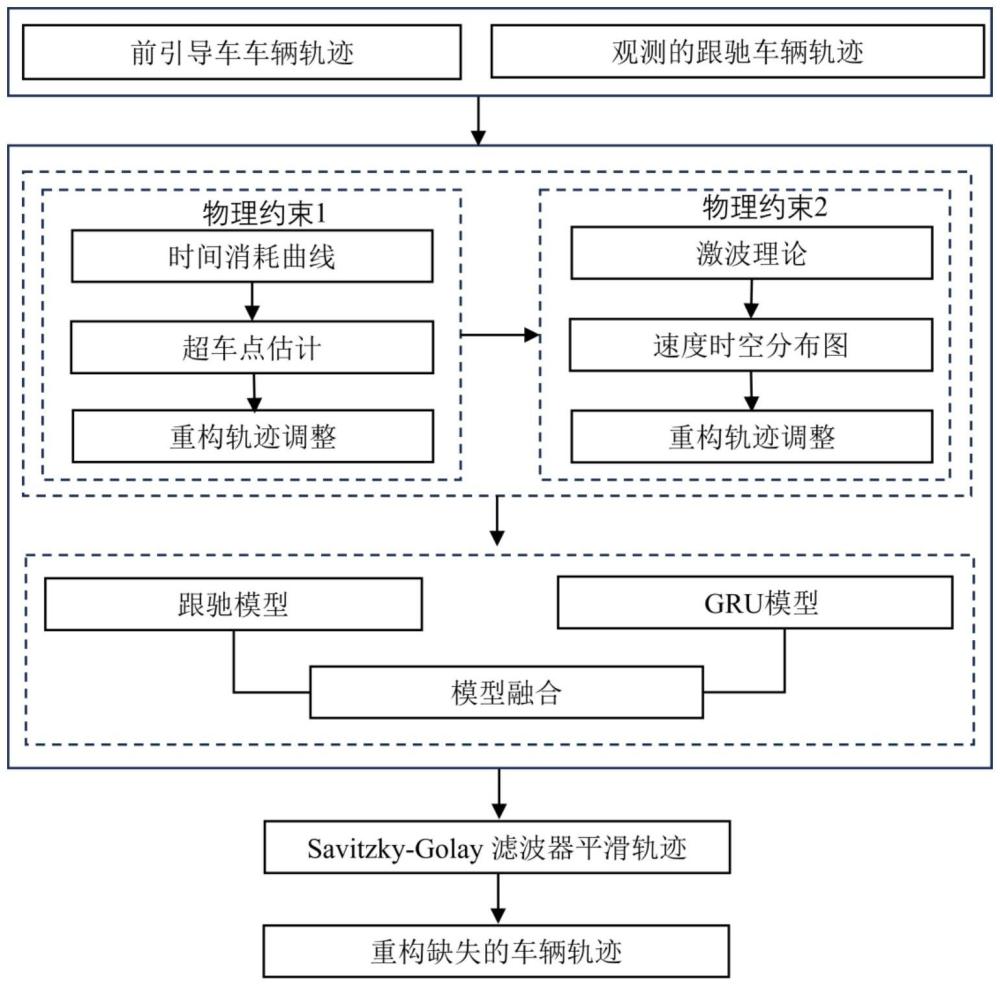
1、本发明针对现有技术存在的问题,提供了一种考虑物理约束的车辆轨迹重构方法,以高速公路为研究对象,提取车辆经过固定检测器的车辆编号、速度,位置和通过时间,基于时间消耗曲线计算车辆轨迹的超车点物理约束;考虑交通流运行状态对车辆轨迹的影响,在激波理论中采用线性假设来简化激波模型,计算车辆速度的时空分布约束;根据两大物理约束,对混合模型的轨迹重构结果进行调整,并把重构的结果经过savitzky-golay滤波器进行轨迹平滑,使得重构的车辆轨迹不仅精度更高,而且更加合理。
2、为解决以上技术问题,本发明提供如下技术方案:一种考虑物理约束的车辆轨迹重构方法,包括如下步骤:
3、s1、基于上游固定检测器和下游虚拟检测器的观测记录,构建车辆轨迹数据集,包括目标车辆编号,以及目标车辆的位置信息、速度、加速度,时间信息;
4、s2、根据序列长度和预测长度,将步骤s1车辆轨迹数据集中每辆车的轨迹数据处理成时间序列数据,并把划分为训练集,测试集和验证集;
5、s3、引入超车行为作为物理约束条件,通过时间消耗曲线估计车辆的超车点信息,得到目标车辆的超车行为约束条件;
6、s4、引入基于激波理论的速度时空分布图作为物理信息表征目标车辆所在交通流的运行状态,得到目标车辆的速度时空分布约束条件;
7、s5、基于跟驰模型和gru模型构建并训练得到融合模型,具体是:用原始的车辆轨迹数据输入到跟驰模型和gru模型,将跟驰模型与gru模型的重构结果进行融合,得到重构的车辆轨迹,并采用目标车辆的超车行为约束条件、以及目标车辆的速度时空分布约束条件对重构轨迹进行校正;
8、s6、对校正之后的车辆轨迹进行平滑处理,消除异常速度和加速度点的影响,获得最终重构的车辆轨迹。
9、进一步地,前述的步骤s1构建车辆轨迹数据集,具体为:通过上游检测器,将经过目标路段的车辆的车牌号作为车辆id,记车辆n经过路段k上游检测器位置的时间为ak,n,经过该目标路段末端的时间为ak+1,n,辆车n在路段k上游的观测集合为{s(ak,n),v(ak,n),ak,n},辆车n在路段k下游的观测集合为{s(ak+1,n),v(ak+1,n),ak+1,n},其中,s(ak,n)为车辆n经过路段k上游检测器的纵向行驶位置,v(ak,n)为车辆n经过路段k上游检测器的速度,s(ak+1,n)为车辆n经过路段k下游虚拟检测器的纵向行驶位置,v(ak+1,n)为车辆n经过路段k下游虚拟检测器的速度。
10、进一步地,前述的步骤s2包括以下子步骤:
11、s2.1、采用滑动窗口的方式划分车辆轨迹,选取的历史序列长度为lh,重构长度为lp,第i个样本的历史序列seq(i)和重构序列p(i)的时间区段分别如公式(1)和(2);车辆的位置和速度,加速度,车道等信息都在这个区段范围内,即时间序列数据tra:
12、seq(i)∈[tstart,tstart+lh](26)
13、p(i)∈[tstart+lh+1,tstart+lh+lp](27)
14、其中tstart是每个样本的开始时间;
15、s2.2、根据分层采样原则,把时间序列数据按照预设比例划分为训练集,验证集和测试集,其中train_set,val_set,test_set分别表示训练集,验证集和测试集,tra是步骤s2.1得到的所有的车辆轨迹样本:
16、train_set=m1*tra (28)
17、val_set=m2*tra (29)
18、test_set=m3*tra (30)
19、m1,m2,m3是预设的比例系数。
20、进一步地,前述的步骤s3包括如下子步骤:
21、s3.1、根据车辆n通过上游检测器和下游虚拟检测器位置的时间,计算每辆车经过目标路段k的旅行时间tk,n,继而获得数据集中n辆车在目标路段的旅行时间观测集:
22、s3.2、通过绘制观测时间的分布图并进行kolmogorov-smirnov检验;然后基于车辆在交通流运行状态稳定的情况下路段k的旅行时间符合正太分布,获得车辆通过路段k的期望旅行时间如下式:
23、tk,n=ak+1,n-ak,n (31)
24、
25、其中,tk,n是车辆n通过路段k的旅行时间,是车辆n通过路段k的旅行时间的方差,ak,n是车辆n经过路段k上游检测器位置的时间,ak+1,n为车辆n经过目标路段末端的时间;
26、s3.3、根据计算的期望旅行时间基于车辆n匀速行驶,得到车辆n通过研究路段k末端的时间为进而计算车辆的位置和时间如公式(9),
27、
28、其中,为车辆n通过路段k的平均速度,lk为路段k的长度,s′k,n,t为车辆n在路段k上的纵向行驶距离,
29、s3.4、根据不同车辆的轨迹位置和时间表达式,得到估计的超车点重构的车辆轨迹根据公式(11)-(12)进行调整:
30、
31、其中(tk″,n,s′k′,n,t)表示真实的超车点位置,sk″′,n,t是调整之后的车辆轨迹点位置。进一步地,前述的步骤s4包括如下子步骤:
32、s4.1、基于激波理论引入线性假设,计算每个车道中速度的时空分布:
33、
34、其中,vfv表示激波路径和前车车辆轨迹交叉点a处速度,vr′efer表示在前车和后车之间的任何一个参照点的速度,vnfv表示后车车辆轨迹与激波路径的交叉点b处的速度,l1,l2分别表示参照点和a,b的距离;
35、s4.2、根据步骤s4.1计算的车辆速度时空分布来调整重构的车辆轨迹:考虑速度波动的影响,
36、通过公式(14)计算出车辆轨迹点的速度阈值上限和下限,如果超过速度波动的下限和上限,则对车辆轨迹进行调整,如式(15)
37、
38、vlower=vr′efer-u*vr′efer (41)
39、vupper=vr′efer+u*vr′efer (42)
40、其中vlower,vupper分别表示速度波动的下限和上限,u是速度波动因子。
41、进一步地,前述的步骤s5包括以下子步骤:
42、s5.1、将用校正的车辆轨迹数据输入至跟驰模型中,输出结果sidm,i;
43、s5.2、将用校正的车辆轨迹数据输入至gru模型中进行训练,gru模型包括重置门和更新门两个门结构,gru模型的核心表达式如公式(18)至公式(21),
44、rt=σ(wr·[ht-1,xt]+br) (43)
45、zt=σ(wz·[ht-1,xt]+bz) (44)
46、
47、其中,ht是当前的隐藏状态,是候选的隐藏状态,xt表示输入的数据,wr是重置门的权重矩阵,wz是更新门的权重矩阵,wh是候选状态的权重矩阵,br是重置门的偏置项,bz是更新门的偏置项,bh是候选状态的偏置项,zt是更新门向量,σ是sigmoid激活函数,rt是重置门向量;
48、s5.3、将跟驰模型的输出结果sidm,i与gru模型的重构结果进行融合,并且计算gru模型的平均mae损失,增强gru模型的训练过程;模型融合的过程如表达式(22)所示,
49、
50、widm,i+wgru,i=1 (49)
51、其中sgru,i表示gru模型重构的轨迹点i,widm,i,wgru,i分别表示跟驰模型和gru模型的权重系数,表征不同模型的可信度,两者的和为1,loss为gru模型的训练mae损失。
52、进一步地,前述的步骤s6包括如下子步骤:
53、s6.1,将混合模型重构的车辆轨迹数据输入到savitzky-golay滤波器中,在时域内基于局部多项式最小二乘法拟合,滤除速度和加速度中的噪声,保持信号的形状和宽度不变,通过选取不同的窗宽,得到不同的滤波结果;
54、s6.2,采用经过步骤s6.1得到的速度和加速度,进一步调整重构的车辆轨迹位置如式(25),获得最终重构的车辆轨迹,使重构的车辆轨迹更加合理,
55、
56、其中表示调整之后t时刻车辆的位置,vf,t,vf,t-1分别表示经过savitzky-golay滤波器之后,车辆在t时刻或者t-1时刻的速度。
57、相较于现有技术,本发明采用以上技术方案的有益技术效果如下:
58、本发明充分挖掘路段上固定检测器记录的车辆牌照、速度、时间、加速度等关键数据,引入超车行为和速度时空分布两大物理约束,调整轨迹重构模型重构的车辆轨迹;采用时间消耗曲线计算不同车辆之间的超车点分布约束,为重构车辆轨迹提供额外的信息;基于激波理论,引入线性约束来计算前浮动车和后浮动车之间的速度时空分布,对车辆轨迹的速度波动进行调整;跟驰模型和gru模型融合,结合两大物理约束,最后经过savitzky-golay滤波器完成轨迹平滑,重构的车辆轨迹更加接近真实情况。本发明提出的一种考虑物理约束的车辆轨迹重构方法,重构的精度更高,轨迹重构的mape误差仅3.33%,比轨迹重构的两种经典模型的估计误差分别减小约45%和37%,综上,本发明的方法可以精准把控交通流状态,是进一步保障高速公路平稳运行、监测车辆尾气排放的重要条件,对于细化交通状态评价具有重要的学术意义和应用价值。
- 还没有人留言评论。精彩留言会获得点赞!