磁盘装置以及磁盘装置的控制方法与流程
磁盘装置以及磁盘装置的控制方法
[0001]
本申请享受以日本专利申请2019-161329号(申请日:2019年9月4日)为基础申请的优先权。本申请通过参照该基础申请而包含基础申请的全部内容。
技术领域
[0002]
本发明的实施方式涉及磁盘装置以及磁盘装置的控制方法。
背景技术:
[0003]
在磁盘装置中,由于在进行了数据的写入的情况下来自头的泄漏磁通等的影响(相邻磁道干扰(adjacent track interference:ati)),可能会发生数据被擦除的旁侧擦除(side erase)。为了防止旁侧擦除,磁盘装置具有如下功能(刷新功能):在对预定磁道的周边磁道进行了数据的写入的次数达到了规定次数的情况下,对预定磁道的数据进行重写。另外,近年来,开发了具有执行高密度记录的技术的磁盘装置。因此,在磁盘装置中,在对预定磁道写入数据时,向该预定磁道的周边磁道侧偏移而进行写入的可能性有可能变高。
技术实现要素:
[0004]
本发明的实施方式提供能够提高品质的磁盘装置以及磁盘装置的控制方法。
[0005]
实施方式涉及的磁盘装置具备:盘,其具有第1磁道和与所述第1磁道相邻的第2磁道;头,其在所述盘的半径方向上对与所述第1磁道相邻的所述第2磁道写入数据;存储器,其具有能够在所述半径方向上从所述第2磁道的磁道中央向所述第1磁道侧偏移地进行写入的次数的第1上限值;以及控制器,其在对所述第2磁道进行了写入的写入次数达到所述第1上限值之前对所述第1磁道进行重写。
附图说明
[0006]
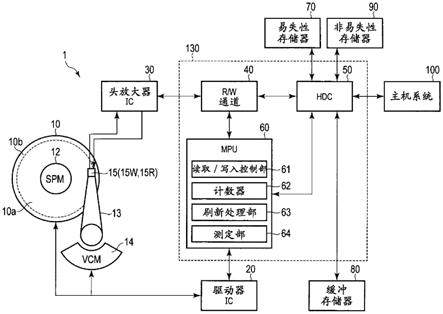
图1是表示第1实施方式涉及的磁盘装置的构成的框图。
[0007]
图2是表示第1实施方式涉及的头相对于盘的配置的一例的示意图。
[0008]
图3是表示在预定磁道进行了磁道偏移写入的情况下在写入于该磁道的相邻磁道的数据产生的影响的一例的图。
[0009]
图4是表示向内方向的磁道偏移写入的一例的图。
[0010]
图5是表示向外方向的磁道偏移写入的一例的图。
[0011]
图6是表示目标写入上限次数以及极限磁道偏移写入上限次数的一例的图。
[0012]
图7是表示错误率(error rate)相对于写入次数的变化的一例的图。
[0013]
图8是表示相邻磁道中的向对象磁道侧的磁道偏移量相对于写入次数的变化的一例的图。
[0014]
图9是表示第1实施方式涉及的磁盘装置的保证次数的设定方法的一例的流程图。
[0015]
图10是表示第1实施方式涉及的刷新处理的控制方法的一例的流程图。
[0016]
图11是表示极限磁道偏移阈值的表的一例的图。
[0017]
图12是表示第2实施方式涉及的磁盘装置的极限磁道偏移阈值的设定方法的一例的流程图。
[0018]
图13是表示预定磁道中的写入头的磁道偏移量的正态分布的一例的图。
[0019]
图14是表示第3实施方式涉及的保证次数的设定方法的一例的图。
[0020]
图15是表示第3实施方式涉及的磁盘装置的保证次数的设定方法的一例的流程图。
[0021]
图16是表示dow的一例的图。
[0022]
图17是表示上限次数的阈值的表的一例的图。
[0023]
图18是表示dow值的表的一例的图。
[0024]
图19是表示修正次数的表的一例的图。
[0025]
图20是表示第4实施方式涉及的磁盘装置的控制方法的一例的流程图。
具体实施方式
[0026]
以下,参照附图对实施方式进行说明。此外,附图是一例,并非限定发明的范围。
[0027]
(第1实施方式)
[0028]
图1是表示第1实施方式涉及的磁盘装置1的构成的框图。
[0029]
磁盘装置1具备后述的头盘组件(hda)、驱动器ic20、头放大器集成电路(以下,头放大器ic或者前置放大器)30、易失性存储器70、缓冲存储器(缓存)80、非易失性存储器90、作为单芯片的集成电路的系统控制器130。另外,磁盘装置1与主机系统(以下简称为主机)100连接。
[0030]
had具有磁盘(以下称为盘)10、主轴马达(以下称为spm)12、搭载有头15的臂13、音圈马达(以下称为vcm)14。盘10安装于主轴马达12,通过主轴马达12的驱动而旋转。臂13以及vcm14构成致动器。致动器通过vcm14的驱动,将搭载于臂13的头15移动控制到盘10上的预定位置。盘10以及头15也可以设置两个以上的数量。
[0031]
盘10对其能够写入数据的区域分配有能够由用户利用的用户数据区域10a和写入系统管理所需要的信息的系统区(area)10b。以下,将盘10的沿着圆周的方向称为圆周方向,将与圆周方向交叉的方向称为半径方向。将盘10的圆周方向的预定位置称为圆周位置,将盘10的半径方向的预定位置称为半径位置。另外,有时也将半径位置以及圆周位置一并简称为位置。盘10(的用户数据区域10a)被按半径方向的预定范围而区分为多个区域(以下有时也称为分区(zone))。分区包括多条磁道(柱面)。另外,磁道包括多个扇区。“磁道”以在盘10的半径方向上区分而得到的多个区域中的一个区域、在盘10的圆周方向上延长的数据、写入到磁道的数据、其他各种含义而使用。“扇区”以将磁道在圆周方向上区分而得到的多个区域中的一个区域、写入到盘10的预定位置的数据、写入到扇区的数据、其他各种含义而使用。
[0032]
头15将滑块作为主体,具备实际安装于该滑块的写入头15w和读取头15r。写入头15w向盘10上写入数据。读取头15r读取记录于盘10上的数据磁道的数据。以下,有时也将“用写入头15w进行数据以及磁道等的写入”简称为“写入数据”,将“用读取头15r进行数据以及磁道等的读取”简称为“读取数据”。
[0033]
图2是表示本实施方式涉及的头15相对于盘10的配置的一例的示意图。如图2所示,将在盘10的半径方向上朝向盘10的外周的方向称为外方向(外侧),将与外方向相反的方向称为内方向(内侧)。另外,如图2所示,在圆周方向上,将盘10进行旋转的方向称为旋转方向。此外,在图2所示的例子中,旋转方向由逆时针表示,但也可以是相反方向(顺时针)。在图2中,用户数据区域10a被区分为位于内方向的内周区域ir、位于外方向的外周区域or以及位于内周区域ir与外周区域or之间的中周区域mr。在图2中示出了半径位置rpe。半径位置rpe包含于中周区域mr。此外,半径位置rpe既可以包含于内周区域ir,也可以包含于外周区域or。在图2中示出了磁道中央trce。磁道中央trce相当于在圆周方向的各圆周位置处通过预定的磁道的半径方向的宽度(以下有时也简称为磁道宽度)的中心的路径。磁道中央trce例如位于与盘10同心圆状的位置。例如,磁道中央trce位于正圆状的位置。此外,磁道中央trce可以不位于圆状的位置,也可以位于一边在半径方向上变动一边在圆周方向上延伸的波状的位置。在图2中,半径位置rpe相当于磁道中央trce。
[0034]
在图2所示的例子中,头15被定位于半径位置rpe,沿着磁道中央trce对预定磁道写入数据,或者沿着磁道中央trce读取被写入于预定磁道的数据。
[0035]
驱动器ic20按照系统控制器130(详细而言为后述的mpu60)的控制,对spm12以及vcm14的驱动进行控制。
[0036]
头放大器ic(前置放大器)30具备读取放大器以及写入驱动器。读取放大器对从盘10读取出的读取信号进行放大,并输出给系统控制器130(详细而言为后述的读取/写入(r/w)通道40)。写入驱动器向头15输出与从r/w通道40输出的信号相应的写入电流。
[0037]
易失性存储器70是当电力供给被切断时所保存的数据会丢失的半导体存储器。易失性存储器70保持磁盘装置1的各部的处理所需要的数据等。易失性存储器70例如是dram(dynamic random access memory,动态随机访问存储器)或者sdram(synchronous dynamic random access memory,同步动态随机访问存储器)。
[0038]
缓冲存储器80是暂时记录在磁盘装置1与主机100之间收发的数据等的半导体存储器。此外,缓冲存储器80也可以与易失性存储器70构成为一体。缓冲存储器80例如是dram、sram(static random access memory,静态随机访问存储器)、sdram、feram(ferroelectric random access memory,铁电随机访问存储器)或者mram(magnetoresistive random access memory,磁阻随机访问存储器)等。
[0039]
非易失性存储器90是即使电力供给被切断仍记录所保存的数据的半导体存储器。非易失性存储器90例如是nor型或者nand型的闪速rom(flash read only memory:from)。
[0040]
系统控制器(控制器)130例如使用多个元件集成于单一芯片的被称为片上系统(system-on-a-chip(soc))的大规模集成电路(lsi)来实现。系统控制器130包括读取/写入(r/w)通道40、硬盘控制器(hdc)50、微处理器(mpu)60。系统控制器130与驱动器ic20、头放大器ic30、易失性存储器70、缓冲存储器80、非易失性存储器90以及主机系统100电连接。
[0041]
r/w通道40按照来自后述的mpu60的指示,执行从盘10向主机100转送的读取数据以及从主机100转送的写入数据的信号处理。r/w通道40具有测定读取数据的信号品质的电路或者功能。r/w通道40例如与头放大器ic30、hdc50以及mpu60等电连接。
[0042]
hdc50按照来自后述的mpu60的指示,对主机100与r/w通道40之间的数据转送进行控制。hdc50例如与r/w通道40、mpu60、易失性存储器70、缓冲存储器80以及非易失性存储器
90等电连接。
[0043]
mpu60是对磁盘装置1的各部进行控制的主控制器。mpu60经由驱动器ic20控制vcm14,执行进行头15的定位的伺服控制。mpu60对向盘10写入数据的写入动作进行控制,并且,选择写入数据的保存目的地。另外,mpu60对从盘10读取数据的读取动作进行控制,并且,对读取数据的处理进行控制。mpu60与磁盘装置1的各部连接。mpu60例如与驱动器ic20、r/w通道40以及hdc50等电连接。
[0044]
mpu60具备读取/写入控制部61、计数器62、刷新处理部63、测定部64。mpu60在固件上执行这些各部、例如读取/写入控制部61、计数器62、刷新处理部63以及测定部64等的处理。此外,mpu60也可以作为电路来具备这些各部、例如读取/写入控制部61、计数器62、刷新处理部63以及测定部64等。
[0045]
读取/写入控制部61按照来自主机100的命令等,对数据的读取处理以及写入处理进行控制。读取/写入控制部61经由驱动器ic20控制vcm14,将头15定位于盘10上的预定位置,进行数据的读取或者写入。
[0046]
读取/写入控制部61由于对于磁盘装置1的干扰、头15以及盘10的特性等,可能从预定区域的半径方向的中心在半径方向上偏移预定距离而进行数据的写入。换言之,读取/写入控制部61可能由从预定磁道的磁道中央在半径方向偏移了预定的偏移量(以下有时也称为磁道偏移量)的头15(写入头15w)进行数据的写入。磁道偏移量相当于头15(写入头15w)相对于预定磁道中的磁道中央的半径方向上的偏移量。有时也将在预定磁道中由偏移了预定的磁道偏移量的头15(写入头15w)进行数据的写入称为“磁道偏移写入”。在由于干扰、头15以及盘10的特性等,而对预定区域写入数据时向与该区域在半径方向上相邻的区域(以下有时也称为相邻区域)侧偏移而进行了数据的写入的情况下,有可能产生擦除该相邻区域的数据等的影响。换言之,在由于干扰、头15以及盘10的特性等,而对预定磁道写入数据时向与该磁道在半径方向上相邻的磁道(以下有时也称为相邻磁道)侧偏移而进行了磁道偏移写入的情况下,有可能产生擦除写入于该磁道的相邻磁道的数据等的影响。在此,所谓的“相邻”当然包括物体、区域以及空间等以接触的方式排列的含义,也包括以空开预定间隔的方式排列的含义。“相邻区域”包括“与预定区域在外方向上相邻的区域”、“与预定区域在内方向上相邻的区域”以及“与预定区域在外方向以及内方向上相邻的多个区域”。另外,“相邻磁道”包括“与预定磁道在外方向上相邻的磁道”、“与预定磁道在内方向上相邻的磁道”以及“与预定磁道在外方向以及内方向上相邻的多条磁道”。例如,读取/写入控制部61也能够在预定磁道中将头15(写入头15w)定位于偏移了磁道偏移量的半径位置来进行数据的磁道偏移写入。
[0047]
图3是表示在预定磁道中进行了磁道偏移写入的情况下在写入于该磁道的相邻磁道的数据产生的影响的一例的图。在图3中,磁道trk-1、磁道trk以及磁道trk+1从半径方向的内方向朝向外方向按这些记载的顺序排列。换言之,磁道trk在磁道trk-1的外方向相邻,磁道trk+1在磁道trk的外方向相邻。在图3中,为了便于说明,磁道trk-1、磁道trk以及磁道trk+1呈直线的带状延伸,但实际上是沿着圆周方向弯曲。另外,磁道trk-1、磁道trk以及磁道trk+1也可以是一边在半径方向上变动一边在圆周方向上延伸的波状。在图3中示出了写入于磁道trk-1的数据dtk-1、写入于磁道trk的数据dtk、写入于磁道trk+1的数据dtk+1。数据dtk-1相当于在磁道trk-1的圆周方向的预定范围所写入的数据。数据dk相当
于在磁道trk的圆周方向的预定范围所写入的数据。数据dk+1相当于在磁道trk+1的圆周方向的预定范围所写入的数据。另外,在图3示出了圆周位置cpk。
[0048]
在图3所示的例子中,首先,读取/写入控制部61对磁道trk写入数据dtk。接着,读取/写入控制部61对磁道trk-1写入数据dtk-1,或者对磁道trk+1写入数据。读取/写入控制部61例如在对磁道trk-1写入数据dtk-1时,在圆周位置cpk处在半径方向的外方向上以预定的磁道偏移量进行磁道偏移写入。读取/写入控制部61例如在对磁道trk+1写入数据dtk+1时,在圆周位置cpk处在半径方向的内方向上以预定的磁道偏移量进行磁道偏移写入。圆周位置cpk处的磁道trk的数据dtk可能因在圆周位置cpk处对磁道trk-1的数据dtk-1进行了偏置写入(offset write)时的头15的泄漏磁通等的影响(adjacent track interference:ati)、以及在圆周位置cpk处对磁道trk+1的数据dtk+1进行了偏置写入时的ati等的影响而发生劣化。
[0049]
计数器62对在盘10的预定区域(以下有时也称为对象区域)的相邻区域进行了数据的写入的次数(以下称为计数次数或者写入次数)进行计数。换言之,计数器62例如对在预定磁道(以下有时也称为对象磁道)的相邻磁道进行了数据的写入的写入次数进行计数。计数器62在每当对相邻磁道进行一次的数据的写入时将预定值(以下有时也称为计数值)加到写入次数上。例如,计数值为1。计数器62也可以将与盘10的各磁道对应的写入次数作为表记录于预定的记录区域、例如盘10的系统区10b或者非易失性存储器90等。此外,设为了计数器62在相邻磁道被进行了数据的写入的情况对写入次数进行计数,但也可以在半径方向上离开相邻磁道的预定磁道被进行了数据的写入的情况下也对写入次数进行计数。
[0050]
刷新处理部63执行如下处理(以下有时也称为刷新处理):暂且读取写入于盘10的预定区域的数据,将所读取到的数据重写到进行了该数据的读取的记录区域。
[0051]
刷新处理部63例如基于磁道偏移量、写入次数来执行刷新处理。刷新处理部63在判定为对预定磁道进行了数据的磁道偏移写入时的磁道偏移量超过了不在写入于该磁道的相邻磁道的数据产生影响的上限值(以下称为磁道偏移阈值)的情况下,对该相邻磁道执行刷新处理。刷新处理部63在判定为对预定磁道进行了数据的磁道偏移写入时的磁道偏移量超过了不擦除写入于该预定磁道的相邻磁道的数据的上限值(以下称为极限磁道偏移阈值)的情况下,对该预定磁道和该预定磁道的相邻磁道执行刷新处理。例如,刷新处理部63在判定为在预定磁道中从该磁道的磁道中央向外方向偏移而进行了数据的磁道偏移写入时的向外方向的磁道偏移量超过了外方向的极限磁道偏移阈值的情况下,对该预定磁道和该预定磁道的外方向的相邻磁道执行刷新处理。另外,例如刷新处理部63在判定为在预定磁道中从该磁道的磁道中央向内方向偏移而进行了数据的磁道偏移写入时的向内方向的磁道偏移量超过了内方向的极限磁道偏移阈值的情况下,对该预定磁道和该预定磁道的内方向的相邻磁道执行刷新处理。极限磁道偏移阈值比磁道偏移阈值大。磁道偏移阈值以及极限磁道偏移阈值也可以按每个分区、每条磁道(柱面)、或者各头15与各分区、各磁道(柱面)或圆周方向的预定区域(扇区)的每个组合(以下有时也简称为组合)来设定。磁道偏移阈值以及极限磁道偏移阈值既可以在外方向和内方向上相同,也可以不同。另外,刷新处理部63在判定为向对象磁道的相邻磁道进行了数据的写入的写入次数超过了比不会因ati等而将与进行了数据的写入的相邻磁道对应的对象磁道中所写入的数据擦除的写入次数的上限值(以下有时也称为保证次数)小的预定值(以下有时也称为刷新阈值)的情况下,对该
对象磁道执行刷新处理。换言之,刷新处理部63在向对象磁道的相邻磁道进行了数据的写入的写入次数达到保证次数之前,对该对象磁道执行刷新处理。
[0052]
图4是表示向内方向的磁道偏移写入的一例的图。在图4中示出了图3所示的磁道trn以及磁道trn-1。在图4中示出了磁道trn的磁道中央trcn以及磁道trn-1的磁道中央trcn-1。在图4中示出了写入头15w的中心部wc。有时也将“写入头15w的中心部wc”简称为“写入头15w”。在图4中示出了定位于磁道trn的磁道中央trcn来写入数据的写入头15w、从磁道trn的磁道中央trcn在内方向上超过磁道偏移阈值iot1而写入数据的写入头15w、以及从磁道trn的磁道中央trcn在内方向上超过极限磁道偏移阈值iot2而写入数据的写入头15w。
[0053]
刷新处理部63例如在判定为写入头15w从磁道trn的磁道中央trcn在内方向上超过磁道偏移阈值iot1而进行写入的情况下,对磁道trn-1执行刷新处理。
[0054]
刷新处理部63例如在判定为写入头15w从磁道trn的磁道中央trcn在内方向上超过极限磁道偏移阈值iot2而进行写入的情况下,对磁道trn以及trn-1执行刷新处理。
[0055]
图5是表示向外方向的磁道偏移写入的一例的图。在图5中示出了图3所示的磁道trn以及磁道trn+1。在图5中示出了磁道trn的磁道中央trcn以及磁道trn+1的磁道中央trcn+1。在图5中示出了定位于磁道trn的磁道中央trcn而写入数据的写入头15w、从磁道trn的磁道中央trcn在外方向上超过磁道偏移阈值oot1而写入数据的写入头15w、以及从磁道trn的磁道中央trcn在外方向上超过磁道偏移阈值oot2而写入数据的写入头15w。
[0056]
刷新处理部63例如在判定为写入头15w从磁道trn的磁道中央trcn在外方向上超过磁道偏移阈值oot1而进行写入的情况下,对磁道trn+1执行刷新处理。
[0057]
刷新处理部63例如在判定为写入头15w从磁道trn的磁道中央trcn在外方向上超过磁道偏移阈值oot2而进行写入的情况下,对磁道trn以及trn+1执行刷新处理。
[0058]
测定部64测定对象区域的写入次数、和与该写入次数对应的对象区域的错误率。换言之,测定部64测定对象磁道的写入次数、和与该写入次数对应的对象磁道的错误率。测定部64测定、算出或者取得与能够读取写入于对象区域、例如对象磁道的数据、也就是在对象磁道不产生读取错误的错误率的上限值(以下有时也称为错误率上限值或者错误率阈值)对应的写入次数(以下有时也称为上限次数)。换言之,测定部64测定、算出或者取得对象磁道的上限次数。例如,测定部64通过出厂前的试验等来测定对象磁道的写入次数、和与该写入次数对应的对象磁道的错误率,测定、算出或者取得对象磁道的上限次数。此外,上限次数相当于保证次数。
[0059]
例如,测定部64测定将头15(写入头15w)定位于相邻磁道的磁道中央来进行了写入的写入次数(以下有时也称为目标写入次数)、和与该目标写入次数对应的对象磁道的错误率。测定部64测定、算出或者取得与将写入头15w定位于相邻磁道的磁道中央来进行了数据的写入的情况下的对象磁道的上限值对应的目标写入次数(以下有时也称为上限次数或者目标写入上限次数)。
[0060]
例如,测定部64测定在相邻磁道中将头15(写入头15w)定位于向对象磁道侧偏移了磁道偏移量的半径位置而进行了写入(磁道偏移写入)的写入次数(以下有时也称为磁道偏移写入次数)、和与该磁道偏移写入次数对应的对象磁道的错误率。测定部64测定、算出或者取得与在相邻磁道中将写入头15w定位于向对象磁道侧偏移了磁道偏移量的半径位置
而进行了数据的写入(磁道偏移写入)的情况下的对象磁道的错误率上限值对应的磁道偏移写入次数(以下有时也称为上限次数或者磁道偏移上限次数)。
[0061]
例如,测定部64测定在相邻磁道中将头15(写入头15w)定位于向对象磁道侧偏移了极限磁道偏移阈值的半径位置而进行了写入(磁道偏移写入)的写入次数(以下有时也称为极限磁道偏移写入次数)、和与该极限磁道偏移写入次数对应的对象磁道的错误率。测定部64测定、算出或者取得与在相邻磁道中将写入头15w定位于从该相邻磁道的磁道中央向对象磁道侧偏移了极限磁道偏移阈值的半径位置而进行了数据的写入(磁道偏移写入)的情况下的对象磁道的错误率上限值对应的极限磁道偏移写入次数(以下有时也称为上限次数或者极限磁道偏移写入次数)。极限磁道偏移写入上限次数比目标写入上限次数小。
[0062]
例如,测定部64也可以具有通过试验等测定的每个分区、每条磁道(柱面)或者每个组合的错误率上限值。另外,例如测定部64也可以在能够读取对相邻磁道执行了预定的写入次数(以下有时也称为之前的写入次数)的写入处理后的对象磁道、且无法读取对相邻磁道执行了在该写入次数加上计数值而得到的写入次数(以下有时也称为接下来的写入次数)的写入处理后的对象磁道的情况下,测定对相邻磁道执行了之前的写入次数的写入处理后的对象磁道的错误率,将测定出的错误率设定为该对象磁道的错误率上限值。
[0063]
例如,测定部64基于错误率上限值和表示错误率相对于写入次数的变化的近似式(以下有时也简称为近似式),算出与错误率上限值对应的保证次数。例如,测定部64测定与多个写入次数分别对应的多个错误率,基于测定出的多个写入次数和与这些写入次数分别对应的多个错误率导出近似式,基于所导出的近似式和错误率上限值,算出对象磁道的上限次数。在一例中,测定部64反复进行所设定的尝试次数(以下有时也称为设定次数)的、在相邻磁道中将头15(写入头15w)定位于向对象磁道侧偏移了一定的磁道偏移量的半径位置而进行数据的写入并测定与该相邻磁道对应的对象磁道的错误率的处理,基于测定出的多个写入次数和与这些写入次数分别对应的多个错误率导出近似式。测定部64也可以通过试验等按每个分区、每条磁道(柱面)或者每个组合导出近似式,将所导出的近似式作为表记录于预定的记录区域、例如盘10的系统区10b或者非易失性存储器90等。
[0064]
另外,例如测定部64也可以测定与执行了预定的写入次数的写入处理的相邻磁道对应的对象磁道的错误率,测定与执行了对该写入次数加上计数值而得到的写入次数的写入处理的相邻磁道对应的对象磁道的错误率,这样反复进行对相邻磁道写入数据并测定与该相邻磁道对应的对象磁道的错误率的处理,直到对象磁道的错误率达到错误率上限值,来测定对象磁道的上限次数。在一例中,测定部64也可以反复进行在相邻磁道中将头15(写入头15w)定位于向对象磁道侧偏移了一定的磁道偏移量的半径位而进行数据的写入并测定与该相邻磁道对应的对象磁道的错误率的处理,直到对象磁道的错误率达到错误率上限值,来测定对象磁道的上限次数。此外,测定部64也可以反复进行如下处理:对相邻磁道写入数据,仅在写入次数达到几个特定的写入次数(以下有时也称为测定次数)时测定错误率。
[0065]
测定部64也可以将错误率上限值和上限次数按每个分区、每条磁道(柱面)或者每个组合来作为表记录于预定的记录区域、例如盘10的系统区10b或者非易失性存储器90等。
[0066]
测定部64设定对象区域、例如对象磁道的保证次数。例如,测定部64将所测定、算出或者取得的各种上限次数(目标写入上限次数、磁道偏移写入上限次数以及极限磁道偏
移写入上限次数)中的极限磁道偏移写入上限次数设定为对象磁道的保证次数。例如,测定部64也可以仅测定、算出或者取得极限磁道偏移写入上限次数,将极限磁道偏移写入上限次数设定为对象磁道的保证次数。测定部64例如也可以按每个分区、每条磁道(柱面)或者每个组合来将极限磁道偏移写入上限次数设定为保证次数,将按每个分区、每条磁道(柱面)或者每个组合所设定的保证次数作为表记录于预定的记录区域、例如系统区10b或者非易失性存储器90等。
[0067]
图6是表示目标写入上限次数ath以及极限磁道偏移写入上限次数awth的一例的图。
[0068]
在图6所示的例子中,极限磁道偏移写入上限次数awth比目标写入上限次数ath小磁道偏移写入余裕xa。
[0069]
图7是表示错误率相对于写入次数的变化的一例的图。在图7中示出了错误率相对于在相邻磁道中向对象磁道侧偏移了不同的磁道偏移量而进行了偏置写入的写入次数的变化(以下有时也简称为错误率的变化)wol1、wol2、wol3、wol4以及wol5。错误率的变化wol1相当于错误率相对于将写入头15w定位于相邻磁道的磁道中央而进行了写入的写入次数的变化。多个错误率的变化wol2~wol5分别相当于错误率相对于在相邻磁道中分别将写入头15w定位于偏移了不同的极限磁道偏移阈值的多个半径位置而进行了写入的多个写入次数的变化。与错误率的变化wol3对应的极限磁道偏移阈值(例如27%)比与错误率的变化wol2对应的极限磁道偏移阈值(例如25%)大。与错误率的变化wol4对应的极限磁道偏移阈值(例如28%)比与错误率的变化wol3对应的极限磁道偏移阈值(例如27%)大。与错误率的变化wol5对应的极限磁道偏移阈值(例如30%)比与错误率的变化wol4对应的极限磁道偏移阈值(例如28%)大。在图7中,纵轴表示错误率。在图7的纵轴上,随着向大的箭头的前端方向行进而变大,随着向小的箭头的前端方向行进而变小。在图7的纵轴示出了错误率上限值elv。在图7中,横轴用对数(log10(写入次数))表示写入次数。在图7的横轴上,log10(写入次数)随着向大的箭头的前端方向行进而变大,随着向小的箭头的前端方向行进而变小。在图7的横轴示出了目标写入上限次数ath、极限磁道偏移写入上限次数awth1、awth2、awth3以及awth4。极限磁道偏移写入上限次数awth1比目标写入上限次数ath小,极限磁道偏移写入上限次数awth2比极限磁道偏移写入上限次数awth1小,极限磁道偏移写入上限次数awth3比极限磁道偏移写入上限次数awth2小,极限磁道偏移写入上限次数awth4比极限磁道偏移写入上限次数awth3小。在图7中,与错误率上限值elv对应的错误率的变化wol1的写入次数是目标写入上限次数ath,与错误率上限值elv对应的错误率的变化wol2的写入次数是极限磁道偏移写入上限次数awth1,与错误率上限值elv对应的错误率的变化wol3的写入次数是极限磁道偏移写入上限次数awth2,与错误率上限值elv对应的错误率的变化wol4的写入次数是极限磁道偏移写入上限次数awth3,与错误率上限值elv对应的错误率的变化wol5的写入次数是极限磁道偏移写入上限次数awth4。
[0070]
在图7所示的例子中,测定部64基于错误率的变化wol1以及错误率上限值elv,算出与将写入头15w定位于相邻磁道的磁道中央而进行了写入的情况下的对象磁道的上限值elv对应的目标写入上限次数ath。测定部64基于错误率的变化wol2以及错误率上限值elv,算出与在相邻磁道中将写入头15w定位于向对象磁道侧偏移了与错误率的变化wol2对应的极限磁道偏移阈值量的半径位置而进行了写入的情况下的对象磁道的错误率上限值elv对
应的极限磁道偏移写入上限次数awth1。测定部64基于错误率的变化wol3以及错误率上限值elv,算出与在相邻磁道中将写入头15w定位于向对象磁道侧偏移了与错误率的变化wol3对应的极限磁道偏移阈值量的半径位置而进行了写入的情况下的对象磁道的错误率上限值elv对应的极限磁道偏移写入上限次数awth2。测定部64基于错误率的变化wol4以及错误率上限值elv,算出与在相邻磁道中将写入头15w定位于向对象磁道侧偏移了与错误率的变化wol4对应的极限磁道偏移阈值量的半径位置而进行了写入的情况下的对象磁道的错误率上限值elv对应的极限磁道偏移写入上限次数awth3。测定部64基于错误率的变化wol5以及错误率上限值elv,算出与在相邻磁道中将写入头15w定位于向对象磁道侧偏移了与错误率的变化wol5对应的极限磁道偏移阈值的半径位置而进行了写入的情况下的对象磁道的错误率上限值elv对应的极限磁道偏移写入上限次数awth4。
[0071]
图8是表示相邻磁道中的向对象磁道侧的磁道偏移量相对于写入次数的变化owl的一例的图。在图8中示出了相邻磁道中的向对象磁道侧的磁道偏移量相对于写入次数的变化(以下简称为向对象磁道侧的磁道偏移量的变化)owl。在图8所示的向对象磁道侧的磁道偏移量的变化owl上示出了与目标写入上限次数ath对应的磁道偏移量(=0)所对应的点p0、与极限磁道偏移写入上限次数awth1对应的磁道偏移量(极限磁道偏移阈值)sov1所对应的点p1、与极限磁道偏移写入上限次数awth2对应的磁道偏移量(极限磁道偏移阈值)sov2所对应的点p2、与极限磁道偏移写入上限次数awth3对应的磁道偏移量(极限磁道偏移阈值)sov3所对应的点p3、与极限磁道偏移写入上限次数awth4对应的磁道偏移量(极限磁道偏移阈值)sov4所对应的点p4。在图8中,纵轴表示向对象磁道侧的磁道偏移量。在图8的纵轴上,向对象磁道侧的磁道偏移量随着向大的箭头的前端方向行进而变大,随着向小的箭头的前端方向行进而变小。在图8的纵轴示出了向对象磁道侧的磁道偏移量(极限磁道偏移阈值)sov1、sov2、sov3以及sov4。磁道偏移量sov2比磁道偏移量sov1大,磁道偏移量sov3比磁道偏移量sov2大,磁道偏移量sov4比磁道偏移量sov3大。在图8中,横轴表示写入次数。在图8的横轴上,写入次数随着向大的箭头的前端方向行进而变大,随着向小的箭头的前端方向行进而变小。在图8的横轴示出了写入次数(目标写入上限次数)ath以及上限次数(极限磁道偏移写入上限次数)awth1、awth2、awth3、awth4。
[0072]
在图8所示的例子中,测定部64将极限磁道偏移写入上限次数awth1设定为对象磁道的保证次数。在将极限磁道偏移写入上限次数awth1设定为了对象磁道的保证次数的情况下,该对象磁道的磁道偏移写入余裕xa相当于目标写入上限次数ath与极限磁道偏移写入上限次数awth1的差值xa1。
[0073]
在图8所示的例子中,测定部64将极限磁道偏移写入上限次数awth2设定为对象磁道的保证次数。在将极限磁道偏移写入上限次数awth2设定为了对象磁道的保证次数的情况下,该对象磁道的磁道偏移写入余裕xa相当于目标写入上限次数ath与极限磁道偏移写入上限次数awth2的差值xa2。差值xa2比差值xa1大。
[0074]
在图8所示的例子中,测定部64将极限磁道偏移写入上限次数awth3设定为对象磁道的保证次数。在将极限磁道偏移写入上限次数awth3设定为了对象磁道的保证次数的情况下,该对象磁道的磁道偏移写入余裕xa相当于目标写入上限次数ath与极限磁道偏移写入上限次数awth3的差值xa3。差值xa3比差值xa2大。
[0075]
在图8所示的例子中,测定部64将极限磁道偏移写入上限次数awth4设定为对象磁
道的保证次数。在将极限磁道偏移写入上限次数awth4设定为了对象磁道的保证次数的情况下,该对象磁道的磁道偏移写入余裕xa相当于目标写入上限次数ath与极限磁道偏移写入上限次数awth4的差值xa4。差值xa4比差值xa3大。
[0076]
图9是表示本实施方式涉及的磁盘装置1的保证次数的设定方法的一例的流程图。
[0077]
mpu60向对象区域、例如对象磁道写入数据(b901),设为对象磁道的写入次数(i)=0(b902)。mpu60在相邻区域、例如相邻磁道中向对象磁道侧偏移磁道偏移量而写入数据,对写入次数(i)加上计数值、例如1(b903)。mpu60测定对象磁道的错误率(b904),判定对象磁道的错误率是超过了错误率上限值、还是为错误率上限值以下(b905)。在判定为对象磁道的错误率超过了错误率上限值的情况下(b905:是),mpu60进入b907的处理。在判定为对象磁道的错误率为错误率上限值以下的情况下(b905:否),mpu60判定是i=n、还是不是i=n(b906)。在此,n是设定次数,例如是正整数。在判定为不是i=n的情况下(b906:否),mpu60进入b903的处理。在判定为i=n的情况下(b906:是),mpu60取得对象磁道的上限次数(b907)。例如,mpu60反复进行设定次数n的在相邻磁道中在向对象磁道侧偏移了一定的磁道偏移量的半径位置进行数据的写入并测定与该相邻磁道对应的对象磁道的错误率的处理,基于测定出的多个写入次数和分别与这些写入次数对应的多个错误率来导出近似式,基于所导出的近似式以及错误率上限值来取得对象磁道的上限次数。另外,例如mpu60反复进行在相邻磁道中在向对象磁道侧偏移了一定的磁道偏移量的半径位置进行数据的写入并测定与该相邻磁道对应的对象磁道的错误率的处理,取得对象磁道的错误率超过了错误率上限值的写入次数的前一个写入次数(错误率次数)。mpu60将所取得的上限次数设定为对象磁道的保证次数(b908),结束处理。
[0078]
图10是表示本实施方式涉及的刷新处理的控制方法的一例的流程图。
[0079]
mpu60判定向对象区域、例如对象磁道的相邻区域、例如相邻磁道写入数据时的磁道偏移量是超过了磁道偏移阈值、还是为磁道偏移阈值以下(b1001)。在判定为对相邻磁道写入数据时的磁道偏移量为磁道偏移阈值以下的情况下(b1001:否),mpu60判定对相邻磁道进行了写入的写入次数是超过了刷新阈值、还是为刷新阈值以下(b1002)。在判定为写入次数为刷新阈值以下的情况下(b1002:否),mpu60结束处理。在判定为写入次数超过了刷新阈值的情况下(b1002:是),mpu60在对象磁道执行刷新处理(b1003),结束处理。
[0080]
在判定为对相邻磁道写入数据时的磁道偏移量超过了磁道偏移阈值的情况下(b1001:是),mpu60判定对相邻磁道写入数据时的磁道偏移量是超过了极限磁道偏移阈值、还是为极限磁道偏移阈值以下(b1004)。在判定为对相邻磁道写入数据时的磁道偏移量为极限磁道偏移阈值以下的情况下(b1004:否),mpu60进入b1003的处理。在判定为对相邻磁道写入数据时的磁道偏移量超过了极限磁道偏移阈值的情况下(b1005),mpu60对相邻磁道以及与该相邻磁道对应的对象磁道执行刷新处理(b1005),结束处理。例如,在判定为在向对象磁道的外方向的相邻磁道写入数据时向内方向(对象磁道侧)的磁道偏移量超过了相邻磁道的内方向的极限磁道偏移阈值的情况下,mpu60对该对象磁道的外方向的相邻磁道和该对象磁道执行刷新处理。另外,例如在判定为在向对象磁道的内方向的相邻磁道写入数据时向外方向(对象磁道侧)的磁道偏移量超过了相邻磁道的外方向的极限磁道偏移阈值的情况下,mpu60对该对象磁道的内方向的相邻磁道和该对象磁道执行刷新处理。
[0081]
根据本实施方式,磁盘装置1向对象区域、例如对象磁道写入数据,在对象区域的
相邻区域、例如对象磁道的相邻磁道中以预定的磁道偏移量执行预定的写入次数的写入处理。磁盘装置1测定执行了预定的写入次数的写入处理后的对象磁道的错误率。例如,磁盘装置1反复进行预定的设定次数的在相邻磁道中在向对象磁道侧偏移了一定的磁道偏移量的半径位置进行数据的写入并测定与该相邻磁道对应的对象磁道的错误率的处理,基于测定出的多个写入次数和分别与这些写入次数对应的多个错误率来导出近似式,基于所导出的近似式以及错误率上限值,取得对象磁道的上限次数(磁道偏移写入上限次数以及极限磁道偏移写入上限次数)。另外,例如磁盘装置1反复进行在相邻磁道中在向对象磁道侧偏移了一定的磁道偏移量的半径位置进行数据的写入并测定与该相邻磁道对应的对象磁道的错误率的处理,直到对象磁道的错误率达到错误率上限值,来取得对象磁道的上限次数(磁道偏移写入上限次数以及极限磁道偏移写入上限次数)。磁盘装置1将所取得的上限次数设定为对象磁道的保证次数。因此,磁盘装置1能够高效地设定保证次数。另外,磁盘装置1能够提高数据的可靠性。因此,磁盘装置1能够提高品质。
[0082]
(第2实施方式)
[0083]
接着,对其他实施方式涉及的磁盘装置进行说明。在其他实施方式中,对与前述的实施方式相同的部分标记同一参照标号,省略其详细的说明。
[0084]
第2实施方式涉及的磁盘装置1的极限磁道偏移阈值的设定方法与第1实施方式的磁盘装置1不同。
[0085]
测定部64测定对象磁道的写入次数、与该写入次数对应的对象磁道的错误率、相邻磁道中的磁道偏移量。测定部64向对象磁道写入数据,在对象磁道的相邻磁道、例如外方向的相邻磁道(或者内方向的相邻磁道)执行保证次数的写入处理。测定部64在执行了保证次数的写入处理的相邻磁道、例如外方向的相邻磁道(或者内方向的相邻磁道)中,将头15(写入头15w)定位于向对象磁道侧偏移了从与多个极限磁道偏移阈值中的最大的极限磁道偏移阈值(以下有时也称为最大阈值)相当的距离减去预定距离(以下有时也称为调整量)而得到的磁道偏移量的半径位置而进行数据的写入。测定部64对与向对象磁道侧偏移了从相当于最大阈值的距离减去调整量而得到的磁道偏移量而进行了数据的写入的外方向的相邻磁道(或者内方向的相邻磁道)对应的对象磁道进行读取。在该对象磁道发生了读取错误的情况下,测定部64对该对象磁道重写数据,对该外方向的相邻磁道(或者内方向的相邻磁道)再次执行保证次数的写入处理。测定部64在再次执行了保证次数的写入处理的外方向的相邻磁道(或者内方向的相邻磁道)中,将写入头15w定位于向对象磁道侧偏移了从前一个磁道偏移量进一步减去调整量而得到的磁道偏移量的半径位置而进行数据的写入。测定部64对与向对象磁道侧偏移了从前一个磁道偏移量进一步减去调整量而得到的磁道偏移量而进行了数据的写入的外方向的相邻磁道(或者内方向的相邻磁道)对应的对象磁道进行读取。测定部64反复进行如下处理直到变为在对象磁道不发生读取错误,该处理为:向该对象磁道重写数据,对该外方向的相邻磁道(或者内方向的相邻磁道)再次执行保证次数的写入处理,在再次执行了保证次数的写入处理的外方向的相邻磁道(或者内方向的相邻磁道)中向对象磁道侧偏移了从前一个磁道偏移量减去调整量而得到的磁道偏移量而进行数据的写入,对与该外方向的相邻磁道(或者内方向的相邻磁道)对应的对象磁道进行读取。测定部64测定在该对象磁道未发生读取错误时的该外方向的相邻磁道(或者内方向的相邻磁道)的磁道偏移量。测定部64将测定出的磁道偏移量设定为该外方向的相邻磁道(或
者内方向的相邻磁道)的极限磁道偏移阈值。测定部64通过前述的处理,按每个分区、每个磁道或者每个组合设定极限磁道偏移阈值,将按每个分区、每个磁道或者每个组合所设定的极限磁道偏移阈值作为表记录于预定的记录区域、例如盘10的系统区10b或者非易失性存储器90。
[0086]
图11是表示极限磁道偏移阈值的表tb1的一例的图。在图11中,盘10被区分为分区zn0、zn1、zn2、zn3、以及zn4、
…
。在图11中,在表tb1的横向示出了分区zn0、zn1、zn2、zn3、以及zn4、
…
。在图11中,头15包括head0、head1、head2、head3、以及head4、
…
。在图11中,在表tb1的纵向示出了head0、head1、head2、head3、以及head4、
…
。在图11的表tb1示出了图8所示的极限磁道偏移阈值sov1、sov2、sov3、sov4。
[0087]
在图11所示的例子中,测定部64例如将表tb1展开到易失性存储器70或者缓冲存储器80等,按各头15和各分区的每个组合来设定极限磁道偏移,将按每个组合所设定的极限磁道偏移阈值的表tb1记录于预定的记录区域、例如盘10的系统区10b或者非易失性存储器90。
[0088]
图12是表示第2实施方式涉及的磁盘装置1的极限磁道偏移阈值的设定方法的一例的流程图。
[0089]
mpu60设为尝试次数(m)=0(b1201),向对象磁道写入数据(b1202)。mpu60在对象磁道的相邻磁道执行保证次数的写入处理(b1203)。例如,mpu60在对象磁道的外方向的相邻磁道以及内方向的相邻磁道中的一方执行保证次数的写入处理。mpu60在相邻磁道、例如外方向的相邻磁道以及内方向的相邻磁道中的一方以磁道偏移量(mth-m
×
dx)写入数据(磁道偏移写入)(b1204)。在此,mth为最大阈值,dx为调整量。mpu60读取对象磁道(b1205),判定在对象磁道是发生了读取错误、还是没有发生读取错误(b1206)。在判定为在对象磁道发生了读取错误的情况下(b1206:是),mpu60设为尝试次数m=m+1,进入b1202的处理。在判定为在对象磁道没有发生读取错误的情况下(b1206:否),mpu60测定对相邻磁道进行了数据的写入时的磁道偏移量(b1208),将测定出的磁道偏移量设定为该相邻磁道的极限磁道偏移阈值(b1209)。例如,在判定为在对象磁道没有发生读取错误的情况下,mpu60测定对对象磁道的外方向的相邻磁道(或者内方向的相邻磁道)进行了数据的写入时的磁道偏移量,将测定出的磁道偏移量设定为该外方向的相邻磁道(或者内方向的相邻磁道)的极限磁道偏移阈值。
[0090]
根据第2实施方式,磁盘装置1向对象磁道写入数据,在对象磁道的相邻磁道、例如外方向的相邻磁道(或者内方向的相邻磁道)执行保证次数的写入处理。磁盘装置1在相邻磁道、例如外方向的相邻磁道(或者内方向的相邻磁道)中,以调整了调整量后的磁道偏移量读取数据,对与外方向的相邻磁道(或者内方向的相邻磁道)对应的对象磁道进行读取。磁盘装置1反复进行如下处理直到变为不发生读取错误,该处理为:向对象磁道进行写入,在对象磁道的外方向的相邻磁道(或者内方向的相邻磁道)执行保证次数的写入处理,在外方向的相邻磁道(或者内方向的相邻磁道)中以调整了调整量后的磁道偏移量进行数据的写入,对与该外方向的相邻磁道(或者内方向的相邻磁道)对应的对象磁道进行读取。磁盘装置1测定未发生读取错误时的外方向的相邻磁道(或者内方向的相邻磁道)的磁道偏移量。磁盘装置1将测定出的磁道偏移量设定为该外方向的相邻磁道(或者内方向的相邻磁道)的极限磁道偏移写入阈值。因此,磁盘装置1能够提高极限磁道偏移阈值的精度。因此,
磁盘装置1能够提高品质。
[0091]
(第3实施方式)
[0092]
第3实施方式涉及的磁盘装置1的保证次数的测定方法与前述的第1以及第2实施方式的磁盘装置1不同。
[0093]
例如,测定部64测定在相邻磁道中一边使磁道偏移量变动一边通过头15(写入头15w)进行了数据的写入的写入次数(以下有时也称为变动磁道偏移写入次数)和与该变动磁道偏移写入次数对应的对象磁道的错误率。测定部64测定、算出或者取得与在相邻磁道中一边使磁道偏移量变动一边用写入头15w进行了写入的情况下的对象磁道的错误率上限值对应的变动磁道偏移写入次数(以下有时也称为上限次数或者变动磁道偏移写入上限次数)。在一例中,测定部64测定、算出或者取得与在相邻磁道中一边基于正态分布使磁道偏移量变动一边用写入头15w进行了数据的写入的情况下的对象磁道的错误率上限值对应的变动磁道偏移写入上限次数。
[0094]
图13是表示预定磁道trg中的写入头15w的磁道偏移量的正态分布nd的一例的图。在图13中示出了预定磁道trg。在图13中,正态分布nd表示磁道trg中的写入头15w的磁道偏移量的概率分布。在图13中,横向表示磁道偏移量。
[0095]
在图13所示的例子中,测定部64在预定磁道trg中一边向外方向以及内方向以正态分布nd的1σ的范围使磁道偏移量变动,一边用写入头15w进行数据的写入。对于标准偏差σ,预先按每个装置、每个头或者每个头/分区来进行测定,设为使用该测定值。
[0096]
图14是表示第3实施方式涉及的保证次数的测定方法的一例的图。在图14中,磁道trj-1、磁道trj以及磁道trj+1从内侧向外侧按这些顺序排列。换言之,磁道trj在磁道trj-1的外方向相邻,磁道trj+1在磁道trj的外方向相邻。在图14中,为了便于说明,磁道trj-1、磁道trj以及磁道trj+1呈直线的带状延伸,但实际上是沿着圆周方向弯曲。另外,磁道trj-1、磁道trj以及磁道trj+1也可以是一边在半径方向上变动一边在圆周方向上延伸的波状。在图14中,磁道trj为对象磁道,磁道trj-1以及trj+1为相邻磁道。
[0097]
在图14所示的例子中,测定部64测定与在相邻磁道trj-1以及trj+1中如图13所示那样一边在外方向以及内方向上以正态分布nd的1σ的范围使磁道偏移量变动一边用写入头15w进行了数据的写入的情况下的对象磁道trj的错误率上限值对应的变动磁道偏移写入上限次数,将测定出的变动磁道偏移写入上限次数设定为对象磁道trj的保证次数。
[0098]
图15是表示第3实施方式涉及的磁盘装置1的保证次数的设定方法的一例的流程图。
[0099]
mpu60向对象区域、例如对象磁道写入数据(b901),设为对象磁道的写入次数(i)=0(b902)。mpu60在相邻磁道中一边使磁道偏移量变动一边写入数据,对写入次数(i)加上计数值、例如1(b1501)。mpu60判定写入次数是为测定次数、还是不是测定次数(b1502)。在判定为写入次数不是测定次数的情况下(b1502:否),mpu60进入b1501的处理。在判定为写入次数为测定次数的情况下(b1502:是),mpu60测定对象磁道的错误率(b904),判定对象磁道的错误率是超过了错误率上限值、还是为错误率上限值以下(b905)。在判定为对象磁道的错误率超过了错误率上限值的情况下(b905:是),mpu60进入b907的处理。在判定为对象磁道的错误率为错误率上限值以下的情况下(b905:否),mpu60判定是为i=n、还是不为i=n(b906)。在判定为不为i=n的情况下(b906:否),mpu60进入b1501的处理。在判定为i=n的
情况下(b906:是),mpu60取得对象磁道的上限次数(b907)。例如,mpu60反复进行设定次数n的在相邻磁道中一边使磁道偏移量变动一边进行数据的写入并测定与该相邻磁道对应的对象磁道的错误率的处理,基于测定出的多个写入次数和分别与这些写入次数对应的多个错误率来导出近似式,基于所导出的近似式以及错误率上限值,取得对象磁道的上限次数。mpu60将所取得的上限次数设定为对象磁道的保证次数(b908),结束处理。
[0100]
根据第3实施方式,磁盘装置1反复进行在相邻磁道中一边基于正态分布使磁道偏移量变动一边进行数据的写入并测定与该相邻磁道对应的对象磁道的错误率的处理,基于测定出的多个写入次数和分别与这些写入次数对应的多个错误率来导出近似式,基于所导出的近似式以及错误率上限值,取得对象磁道的上限次数。磁盘装置1将所取得的上限次数设定为对象磁道的保证次数。因此,磁盘装置1能够高效地取得保证次数。因此,磁盘装置1能够提高品质。
[0101]
(第4实施方式)
[0102]
第4实施方式涉及的磁盘装置1的保证次数的设定方法与前述的第1~第3实施方式的磁盘装置1不同。
[0103]
测定部64按每个组合来测定上限次数。测定部64按每个组合对因dow(drift of write,写入漂移)而在写入处理中发生了磁道偏移写入的次数(以下有时也称为dow值)赋予权重(以下有时也称为计数权重)来进行计数。计数权重例如比0大且为2以下。测定部64按每个组合来基于dow值修正上限次数,将修正后的上限次数(以下有时也称为修正次数)设定为保证次数。例如,测定部64按每个组合来从上限次数减去dow值而算出修正次数,将所算出的修正次数设定为保证次数。
[0104]
图16是表示dow的一例的图。在图16中,磁道trh-4、trh-3、trh-2、trh-1、trh、trh+1、trh+2、trh+3以及trh+4从半径方向的内方向向外方向按这些记载的顺序排列。换言之,磁道trh-3在磁道trh-4的外方向相邻,磁道trh-2在磁道trh-3的外方向相邻,磁道trh-1在磁道trh-2的外方向相邻,磁道trh在磁道trh-1的外方向相邻,磁道trh+1在磁道trh的外方向相邻,磁道trh+2在磁道trh+1的外方向相邻,磁道trh+3在磁道trh+2的外方向相邻,磁道trh+4在磁道trh+3的外方向相邻。在图16中,在圆周方向上示出了对dow进行计数的区域(以下称为计数区域)cr1、cr2以及cr3。计数区域cr1、cr2以及cr3例如是在圆周方向上相同长度的区域。在图16中示出了表tb2。表tb2包括磁道、各磁道的计数权重、计数区域cr1的dow值、计数区域cr3的dow值以及计数区域cr3的dow值等。在图16的表tb2中,磁道trh-4是计数权重wh-4,磁道trh-3是计数权重wh-3,磁道trh-2是计数权重wh-2,磁道trh-1是计数权重wh-1,磁道trh是计数权重wh,磁道trh+1是计数权重wh+1,磁道trh+2是计数权重wh+2,磁道trh+3是计数权重wh+3,磁道trh+4是计数权重wh+4。计数权重wh-4~wh+4中的各个既可以不同,也可以有几个是相同的。此外,也可以在图16的表tb2中,在各磁道的磁道中央,在外方向和内方向分开来对dow值进行计数。
[0105]
在图16所示的例子中,测定部64在对磁道trh-3进行写入时在计数区域cr3向外方向进行了磁道偏移写入的情况下,在磁道trh-2的计数区域cr3中赋予计数权重wh-2而对dow值c1进行计数。测定部64在对磁道trh-3进行写入时在计数区域cr2向内方向进行了磁道偏移写入的情况下,在磁道trh-4的计数区域cr2中赋予计数权重wh-4而对dow值c1进行计数。测定部64在对磁道trh+1进行写入时在计数区域cr2向外方向进行了磁道偏移写
入的情况下,在磁道trh+2的计数区域cr2中赋予计数权重wh+2而对dow值c3进行计数。测定部64在对磁道trh+3进行写入时在计数区域cr1向内方向进行了磁道偏移写入的情况下,在磁道trh+2的计数区域cr1中赋予计数权重wh+3而对dow值c2进行计数。
[0106]
图17是表示上限次数的阈值的表tb3的一例的图。在图17中,盘10被区分为分区zn0、zn1、以及zn2、
…
。在图17中,在表tb3的横向上示出了分区zn0、zn1、以及zn2、
…
。在图17中,头15包括head0、head1、以及head2、
…
。在图17中,在表tb3的纵向上示出了head0、head1、以及head2、
…
。
[0107]
在图17所示的例子中,测定部64例如将表tb3展开到易失性存储器70或者缓冲存储器80等,按各头15和分区的每个组合来测定上限次数,将按每个组合而测定的上限次数的表tb3记录于预定的记录区域、例如盘10的系统区10b或者非易失性存储器90。
[0108]
图18是表示dow值的表tb4的一例的图。在图18中,表tb4与图17的表tb3同样地,盘10被区分为分区zn0、zn1、以及zn2、
…
。在图18中,在表tb4的横向上示出了分区zn0、zn1、以及zn2、
…
。在图18中,与图17的表tb3同样地,头15包括head0、head1、以及head2、
…
。在图18中,在表tb4的纵向上示出了head0、head1、以及head2、
…
。
[0109]
在图18所示的例子中,测定部64例如将表tb4展开到易失性存储器70或者缓冲存储器80等,按各头15和各计数区域的每个组合来测定dow值,取得各头15和各分区的每个组合的多个dow值中的最大的dow值(以下有时也称为最大dow值),将按各头15和各分区的每个组合而取得的dow值的表tb4记录于预定的记录区域、例如盘10的系统区10b或者非易失性存储器90。
[0110]
图19是表示修正次数的表tb5的一例的图。在图19中,表tb5与图17的表tb3和图18的表tb4同样地,盘10被区分为分区zn0、zn1、以及zn2、
…
。在图19中,在表tb5的横向上示出了分区zn0、zn1、以及zn2、
…
。在图19中,与图17的表tb3和图18的表tb4同样地,头15包括head0、head1、以及head2、
…
。在图19中,在表tb5的纵向示出了head0、head1、以及head2、
…
。
[0111]
在图19所示的例子中,测定部64例如将表tb5展开到易失性存储器70或者缓冲存储器80等,按各头15和各分区的每个组合而基于图18所示的表tb4的dow值对图17所示的表tb3的上限次数进行修正。例如,测定部64按各头15和各分区的每个组合而从图17所示的表tb3的上限次数减去图18所示的表tb4的dow值来算出修正次数,将按各头15和各分区的每个组合而算出的修正次数的表tb5记录于预定的记录区域、例如盘10的系统区10b或者非易失性存储器90。测定部64例如基于图19所示的表tb5,按各头15和各分区的每个组合来将修正次数设定为保证次数。
[0112]
图20是表示第4实施方式涉及的磁盘装置1的控制方法的一例的流程图。
[0113]
mpu60按每个组合来测定上限次数(b2001),测定dow值(b2002)。mpu60按每个组合来基于dow值将上限次数修正为修正次数,将修正后的修正次数设定为保证次数(b2003),结束处理。例如,mpu60按每个组合而从测定出的上限次数减去dow值来算出修正次数,将所算出的修正次数设定为保证次数。
[0114]
根据第4实施方式,磁盘装置1按每个组合来测定上限次数,测定dow值。mpu60按每个组合而从测定出的上限次数减去dow值来算出修正次数,将所算出的修正次数设定为保证次数。因此,磁盘装置1能够提高数据的可靠性。因此,磁盘装置1能够提高品质。
[0115]
以上对几个实施方式进行了说明,但这些实施方式是作为例子提示的,并非意在限定发明的范围。这些新的实施方式能够以其他各种各样的方式来实施,能够在不脱离发明的宗旨的范围内进行各种省略、置换、变更。这些实施方式及其变形包含在发明的范围、宗旨内,并且,包含在权利要求书记载的发明及其等同的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1