清洗方法、半导体制造方法及其系统与流程
[0001]
本发明实施例涉及清洗方法、半导体制造方法及其系统。
背景技术:
[0002]
半导体集成电路(ic)产业已经历指数式增长。ic材料及设计的技术进步已产生世代ic,其中每一代具有比前一代更小及更复杂的电路。在ic演进的过程中,功能密度(即,每芯片面积的互连装置的数目)一般会增大,而几何大小(即,可使用制造工艺产生的最小组件(或线))会减小。此按比例缩小工艺一般通过提高生产效率及降低相关联成本且增加可在减小芯片面积中提供的功能量来彰显效益。此按比例缩小导致处理及制造ic的复杂性增加,且产品的有效质量控制所需的过程变得越来越严格。
技术实现要素:
[0003]
根据本发明的实施例,一种应用于半导体制造中的清洗方法包括:接收具有表面的衬底;识别颗粒在所述衬底的所述表面上的位置;使清洗设备朝向所述颗粒的所述位置移动;执行第一清洗操作以通过从所述清洗设备喷射对抗重力且朝向所述衬底的所述表面流动的清洗液来移除所述颗粒;检测所述衬底的所述表面;及当所述检测的清洗结果不可接受时,执行第二清洗操作。
[0004]
根据本发明的实施例,一种半导体制造方法包括:接收具有表面的光掩模;识别颗粒在所述光掩模的所述表面上的位置;使清洗设备朝向所述颗粒的所述位置移动;执行清洗操作以通过从所述清洗设备喷射对抗重力且朝向所述光掩模的所述表面流动的清洗液来移除所述颗粒;及将所述光掩模的图案转印到半导体衬底。
[0005]
根据本发明的实施例,一种用于清洗衬底的系统包括:衬底固持器,其经配置以固持所述衬底;衬底传感器,其经配置以检测所述衬底;颗粒识别器,其经配置以识别颗粒在所述衬底的表面上的位置;及清洗设备,其经配置以通过喷射对抗重力且朝向所述衬底的所述表面流动的清洗液来对所述衬底的所述表面的所述位置执行清洗操作。
附图说明
[0006]
从结合附图阅读的以下详细描述最佳理解本发明实施例的实施例的方面。应注意,根据行业标准做法,各种结构未按比例绘制。实际上,为使讨论清楚,可任意增大或减小各种结构的尺寸。
[0007]
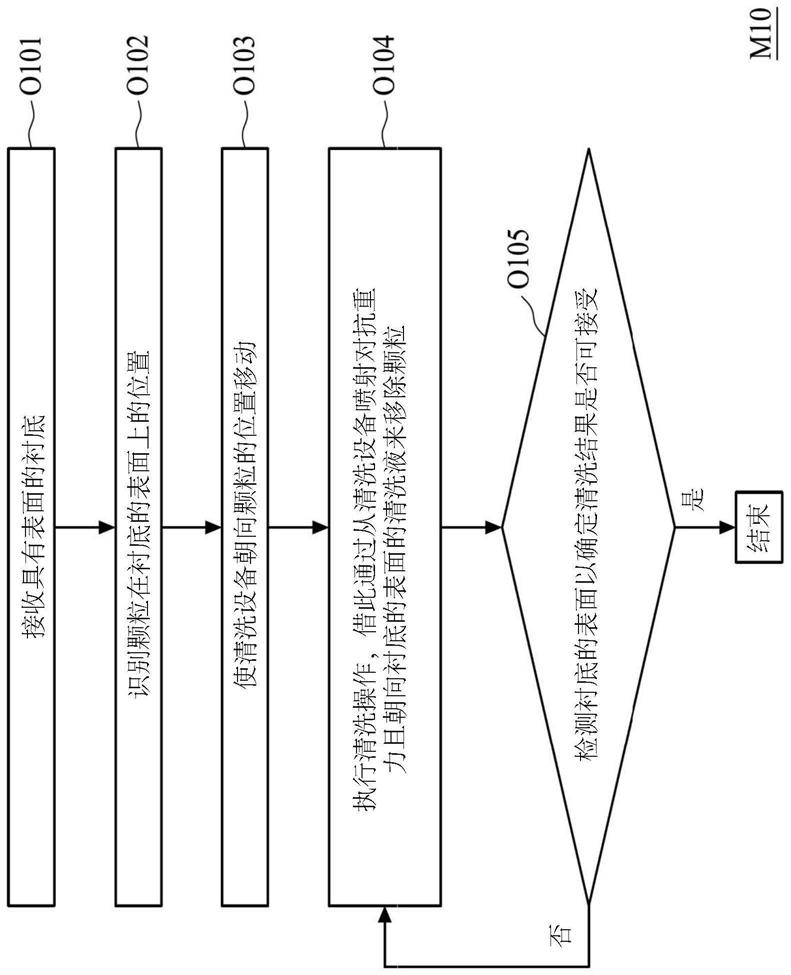
图1是展示根据本发明的一些实施例的应用于半导体制造中的清洗方法的各个步骤的流程图。
[0008]
图2到5是根据本发明的一些实施例的清洗方法的各个步骤的示意图。
[0009]
图6到8是根据本发明的不同实施例的清洗方法的一或多个步骤的示意图。
[0010]
图9是根据本发明的一些实施例的清洗方法的一或多个步骤的示意图。
[0011]
图10是根据本发明的一些实施例的清洗方法的一或多个步骤的示意图。
[0012]
图11到12是根据本发明的一些实施例的应用于不同衬底的清洗方法的示意图。
[0013]
图13是展示根据本发明的一些实施例的半导体制造方法的各个步骤的流程图。
[0014]
图14是根据本发明的一些实施例的半导体制造方法的一或多个步骤的示意图。
[0015]
图15是根据本发明的一些实施例的用于清洗衬底的系统的示意图。
[0016]
图16是根据本发明的一些实施例的其上未放置衬底的系统的衬底固持器的仰视图。
[0017]
图17是根据本发明的一些实施例的其上放置有衬底的系统的衬底固持器的仰视图。
具体实施方式
[0018]
以下揭露提供用于实施所提供目标的不同特征的许多不同实施例或实例。下文将描述元件及布置的特定实例以简化本发明实施例。当然,这些仅为实例且不希望限制。例如,在以下描述中,使第一构件形成于第二构件上方或第二构件上可包含其中形成直接接触的所述第一构件及所述第二构件的实施例,且还可包含其中额外构件可形成于所述第一构件与所述第二构件之间使得所述第一构件及所述第二构件可不直接接触的实施例。另外,本发明实施例可在各种实例中重复元件符号及/或字母。此重复是为了简单及清楚且其本身不指示所讨论的各种实施例及/或配置之间的关系。
[0019]
此外,为便于描述,空间相对术语(例如“下面”、“下方”、“下”、“上方”、“上”及其类似者)在本文中可用于描述元件或构件与另一(些)元件或构件的关系,如图中所说明。空间相对术语除涵盖图中所描绘的定向之外,还希望涵盖装置在使用或操作中的不同定向。可以其它方式定向设备(旋转90度或以其它定向)且还可因此解释本文中所使用的空间相对描述词。
[0020]
如本文中所使用,尽管例如“第一”、“第二”及“第三”的术语描述各种元件、组件、区域、层及/或区段,但这些元件、组件、区域、层及/或区段不应受限于这些术语。这些术语可仅用于使元件、组件、区域、层或区段彼此区分。除非上下文清楚指示,否则本文中所使用的例如“第一”、“第二”及“第三”的术语不隐含序列或顺序。
[0021]
尽管阐述本发明实施例的广泛范围的数值范围及参数是近似值,但应尽可能精确报告具体实例中所阐述的数值。然而,任何数值固有地含有由相应测试测量中所见的标准偏差必然所致的特定误差。此外,如本文中所使用,术语“大体上”、“大致”及“约”一般表示在所属领域的一般技术人员可考虑的值或范围内。替代地,术语“大体上”、“大致”及“约”表示在所属领域的一般技术人员考虑的平均值的可接受标准偏差内。所属领域的一般技术人员应了解,可接受标准偏差可根据不同技术来变动。除在操作/工作实例中之外或除非另有明确说明,否则本文中所揭露的所有数值范围、数量、值及百分比(例如材料数量、持续时间、温度、操作条件、数量比及其类似者的数值范围、数量、值及百分比)应被理解为在所有例子中由术语“大体上”、“大致”或“约”修饰。因此,除非有相反指示,否则本发明实施例及所附权利要求书中所阐述的数值参数是可根据期望来变动的近似值。最后,至少应鉴于所报告的有效数字且通过应用普通舍入技术来解释每一数值参数。范围在本文中可表示为从一个端点到另一端点或介于两个端点之间。除非另有说明,否则本文中所揭露的所有范围包含端点。
[0022]
光刻工艺常用于半导体装置制造中,其中光刻工艺将光掩模的图案转印到目标衬底(通常为其上安置有光敏层的半导体衬底)。如果光掩模具有缺陷或污染物,那么因为污染物的缺陷或图案变化也作为经显影到衬底上的图案中的缺陷转印到目标衬底。特定来说,高分辨率光掩模易受污染影响。造成缺陷或污染物的原因有很多。例如,缺陷及/或污染物可为来自光掩模的制造的残留物、由掩模形成工艺或光刻工艺形成的沉淀杂质或薄雾污染及/或由对光掩模的护膜或光掩模的图案特征执行清洗过程引起的损坏。缺陷可导致所形成的半导体装置的良率、质量或可靠性问题。
[0023]
本发明实施例提供用于清洗各种衬底(尤其是包含易碎构件(例如光掩模的散射条、光掩模的护膜或半导体衬底的电路)的衬底)的清洗方法。本发明实施例的清洗方法可高效率移除衬底的表面上的容纳物、颗粒或残留物。部分因为本发明实施例的倒转清洗方法,可显著减少因为清洗操作的衬底损坏。另外,可由一或多个电子装置实施清洗方法,且可与常规手动清洗过程来减少处理时间及提高效率相比。本发明实施例的清洗方法可应用于半导体制造、光掩模制造或光掩模的常规清洗过程的不同阶段中。
[0024]
图1展示应用于半导体制造中的清洗方法m10的流程图。清洗方法m10包含:(o101)接收具有表面的衬底;(o102)识别颗粒在衬底的表面上的位置;(o103)使清洗设备朝向颗粒的位置移动;及(o104)执行清洗操作,借此通过从清洗设备喷射对抗重力且朝向衬底的表面的清洗液来移除颗粒。在一些实施例中,方法m10进一步包含:(o105)在操作o104之后检测衬底的表面以确定清洗结果是否可接受。如果清洗结果不可接受,那么过程返回到操作(o103);且如果清洗结果可接受,那么清洗方法m10结束。
[0025]
为说明本发明实施例的概念及清洗方法m10,下文将提供各种实施例。然而,不希望使本发明实施例受限于特定实施例。另外,不同实施例中所说明的元件、条件或参数可经组合或修改以形成实施例的不同组合,只要所使用的元件、参数或条件不冲突。为便于说明,不同实施例及图中重复使用具有类似或相同功能及性质的元件符号。
[0026]
图2到6是说明根据本发明的一些实施例的清洗方法m10的示意图。接收或提供衬底11,且衬底11具有表面s101。在一些实施例中,一或多个颗粒12在腔室间运输期间及在存储时或在光刻工艺期间从环境落到或附着到衬底11的表面s101上。颗粒12可包含各种材料及各种配置。在一些实施例中,颗粒12包含有机材料。在一些实施例中,颗粒12包含无机化合物。在一些实施例中,颗粒12包含来自先前操作的残留物。在一些实施例中,颗粒12是附着到衬底11的表面s101的相对平坦物体,例如图2中所展示的颗粒12a。在一些实施例中,颗粒12更多为附着到衬底11的表面s101且从衬底11的表面s101突出的鼓起物体,例如图2中所展示的颗粒12b。
[0027]
在图2所展示的一些实施例中,衬底11是包含光掩模衬底111及护膜112的光掩模,其中表面s101是背向光掩模衬底111的护膜112的外表面。护膜112(例如)经由框架结构来连接到光掩模衬底111。在一些实施例中,光掩模衬底111包含透明板(例如玻璃或石英)及形成于透明板上的图案。在一些实施例中,护膜112覆盖光掩模衬底111的整个图案且框架结构包围光掩模衬底111的整个图案。图2将光掩模衬底111展示为集成结构,为便于说明,未具体展示透明板及图案的不同部分,但其不希望限制本发明实施例。在图2所展示的一些实施例中,具有不同配置的若干颗粒12附着到护膜112的外表面。
[0028]
在一些实施例中,在操作o101之后执行操作o102,且在接收衬底11之后识别颗粒
12在衬底11的表面s101上的位置。在一些实施例中,操作o102包含使颗粒识别器13朝向衬底11的表面s101移动。
[0029]
在一些实施例中,颗粒识别器13包含摄像机。在一些实施例中,颗粒识别器13以从0
°
到90
°
的角度(基本上平行于或垂直于表面s101)朝向衬底11的表面s101移动到面向表面s101的位置。在图3所展示的一些实施例中,颗粒识别器13朝向衬底11的表面s101移动到直接面向表面s101的位置以获取衬底11的整个表面s101的清晰图像。在一些实施例中,根据所获取的整个表面s101的清晰图像来识别颗粒12的位置。接着,在一些实施例中,使颗粒识别器13朝向颗粒12的每一位置移动,且从相对于表面s101的倾角获取颗粒12的图像以识别颗粒12的配置。在一些实施例中,颗粒识别器13是光学微型摄像机,其用于其中很看重成像系统具有非常小大小与最高图像质量的组合的应用中。在一些实施例中,颗粒识别器13是扫描仪。在一些实施例中,移动颗粒识别器13以扫描衬底11的整个表面s101。在一些实施例中,操作o102进一步包含由颗粒识别器13获取衬底11的表面s101的图像。在一些实施例中,由处理器对表面s101的获取图像执行图像识别。常规技术可应用于图像获取操作及图像识别中,且在本文中不受限制。
[0030]
在一些实施例中,颗粒识别器13包含信号发射器及信号接收器(图3中未展示)。在一些实施例中,信号发射器及信号接收器能够发射及接收包含光信号、激光、电子束、红外光或其它适合类型的信号的信号。在一些实施例中,通过跨衬底11的表面s101测量反射光的强度或波长来实现操作o102。在一些实施例中,操作o102包含用光束照射衬底11的表面s101,其中光束由信号发射器产生。在一些实施例中,从衬底11的表面s101反射的光束的反射光由信号接收器检测或接收。在一些实施例中,测量反射光的强度及/或波长以识别颗粒12在衬底11的表面s101上的位置。在一些实施例中,测量及/或识别颗粒12的位置由电连接或通信连接到信号接收器的处理器执行。
[0031]
在一些实施例中,测量从护膜112的清洗表面反射的反射光的波长且将其保存为参考。在一些实施例中,颗粒12吸收光束的部分,且反射光具有不同于参考的波长。在一些实施例中,如果参考与反射光的两个波长之间的差超过阈值,那么检测反射光的波长,且将其与参考进行比较以识别颗粒12的存在及位置。在一些实施例中,检测反射光的波长且将其与光束的波长而非所保存参考进行比较,且如果两者之间的差超过阈值,那么可识别颗粒12的存在及位置。
[0032]
在一些实施例中,将从护膜112的清洗表面反射的光的强度测量为参考。在一些实施例中,颗粒12在各个方向上衍射光束,因此,在颗粒12的位置处所检测到的反射光的强度小于参考。在一些实施例中,检测反射光的强度,且将其与参考进行比较以识别颗粒12的存在及位置。在一些实施例中,检测反射光的强度且将其与光束的强度而非参考进行比较,且如果两者之间的差超过阈值或值,那么可识别颗粒12的存在及位置。在一些实施例中,在操作o102中,还识别及分类颗粒12的配置(例如平坦或鼓起)及大小。
[0033]
在图4所展示的一些实施例中,在操作o102之后执行操作o103,且在识别颗粒12的位置之后使清洗设备14朝向颗粒12的位置移动。在一些实施例中,在操作o103之前,将颗粒识别器13从衬底11移开。在一些实施例中,清洗设备14包含连接到液体储槽的喷嘴,其用于朝向衬底11的表面s101喷射清洗液15。图4的清洗设备14中所展示的箭头说明随后操作o104中清洗液15的流动方向。在一些实施例中,使清洗设备14对准颗粒12移动,使得可在随
后操作s104中通过清洗液15的直接物理冲击来移除颗粒12。在一些实施例中,清洗设备14朝向位置移动且针对表面s101上的颗粒12周围的外围区域,使得可在随后操作s104中通过清洗液15从沿衬底11的表面s101的方向物理冲击来移除颗粒12。在一些实施例中,将清洗设备14放置成垂直于衬底11,使得可在操作s104中朝向表面s101垂直喷射清洗液15,但本发明实施例不受限于此。在一些实施例中,清洗设备14可倾斜,且清洗液15可依角度朝向表面s101喷射。在一些实施例中,放置清洗设备14以在随后操作o104中朝向表面s101与颗粒12之间的接口的边缘调整清洗液15的喷射方向。在一些实施例中,在随后操作o104中使清洗设备14移动成与颗粒12的位置相距0.1cm到2cm的范围内的距离以提供足够物理力来移除颗粒12且不损坏护膜112。
[0034]
图5展示说明根据本发明的一些实施例的清洗方法m10的操作o104的示意图。在一些实施例中,操作o104在操作o103之后执行,且包含经执行以由从清洗设备14对抗重力且朝向衬底11的表面s101流动的清洗液15移除颗粒12的清洗操作。在图5所展示的一些实施例中,清洗液15在与重力方向相反的方向上从清洗设备14喷射出且在邻近于颗粒12的位置的位置处与表面s101接触。然而,本发明实施例不受限于此。如先前段落中所说明,可调整表面s101与清洗液15的喷射方向之间的角度,且还可根据不同应用及要求来调整清洗液15在表面s101上的接触位置。在一些实施例中,在颗粒12的位置处或颗粒12的位置周围执行清洗操作。在一些实施例中,对包含颗粒12的位置的衬底11的整个表面s101执行清洗操作。在一些实施例中,针对颗粒12的位置且接着整个表面s101执行清洗操作以确保颗粒12不变成附着到表面s101的另一位置。
[0035]
为控制清洗液15对表面s101的物理冲击力,通过调谐清洗设备14的孔的内径来将从清洗设备14喷射的清洗液15的流速控制在10ml/min(毫升/分钟)到100ml/min的范围内。在一些实施例中,清洗液15的流速与清洗设备14的孔的内径相关。在一些实施例中,清洗液15的流速随清洗设备14的孔的内径增大而增大。在一些实施例中,清洗液15的流速随清洗设备14与表面s101之间的距离增大而增大。在一些实施例中,清洗设备14的孔的内径是在1mm到10mm的范围内。在一些实施例中,施加于表面s101上的清洗液15的压力是在0.900巴到1.501巴的范围内。在一些实施例中,与表面s101接触的清洗液15的压力是在1.011巴到1.015巴的范围内。在一些实施例中,因为衬底11的倒转清洗过程、清洗操作中的清洗液15的反重力喷射方向及清洗液15的流速的控制而减少衬底11的表面s101(例如光掩模11的护膜112的外表面)受损。在一些实施例中,可防止由清洗操作所致的光掩模11的护膜112上的裂纹或孔,因为可因为清洗液15的反重力喷射方向上的重力的综合优点而很好地控制清洗操作对表面s101的冲击强度。
[0036]
在一些实施例中,清洗操作可包含不同清洗技术或清洗过程。清洗操作可包含超高频音波清洗、uv曝露液体清洗及化学清洗中的至少一者。本发明实施例的超高频音波清洗是指声波清洗类型,其中清洗设备14的传感器以高于常规超音波清洗的频率(khz级)的频率产生声场。在一些实施例中,超高频音波清洗的能量是在1w(瓦特)到15w的范围内。本发明实施例的uv曝露液体清洗是指其中清洗液15流动通过辐射源或紫外线灯且接着输送到表面s101的清洗过程。在一些实施例中,至少uv灯布置于清洗设备14的喷嘴中,清洗液15在被喷射出之前流动通过喷嘴。在一些实施例中,用于uv曝露液体清洗中的光的波长是在200nm(纳米)到400nm的范围内以在清洗液15中产生自由基来促进颗粒12的移除。本发明实
施例的化学清洗是指使用碱性或酸性化学物质作为清洗液15的清洗过程。化学清洗中的h
+
及/或oh-可干扰范德华(van der waals)力,其可为引起颗粒12吸附于表面s101上的主要力。
[0037]
在一些实施例中,不同清洗过程或技术针对不同类型(例如不同配置及/或不同材料)的颗粒12。在一些实施例中,具有鼓起配置的颗粒12(例如图2中的颗粒12b)经受超高频音波清洗及/或uv曝露液体清洗。在一些实施例中,具有平坦配置的颗粒12(例如图2中的颗粒12a)经受化学清洗。在一些实施例中,具有有机材料的颗粒12经受超高频音波清洗、化学清洗及/或uv曝露液体清洗。在一些实施例中,具有较高碳重量百分比的颗粒12经受uv曝露液体清洗。在一些实施例中,基于衬底11的表面s101的材料来选择所使用的清洗过程或技术。
[0038]
在一些实施例中,清洗液15包含去离子水(称为diw)、带去离子水气泡的去离子水(称为di+dib)、臭氧去离子水(与臭氧混合的去离子水(称为di+o3)、带氢气泡的去离子水(称为di+h2)、带氧自由基的去离子水(称为di+o)、硫酸及氢氧化四甲基铵(缩写为tmah)中的至少一者。在一些实施例中,用于化学清洗中的tmah的浓度是在1wt%(重量百分比)到20wt%的范围内。在一些实施例中,用于化学清洗中的硫酸的浓度是在80wt%到小于100wt%的范围内。在一些实施例中,硫酸由过氧化氢稀释。在一些实施例中,di+o中的氧自由基由di+o3中的臭氧产生。在一些实施例中,di+o3用于uv曝露液体清洗中,且辐射源向di+o3提供能量,借此引起经照射di+o3或uv曝露di+o3变成di+o且含有氧自由基。在一些实施例中,应用于uv曝露清洗中的di+o可促进通过氧化来移除有机颗粒12。
[0039]
为进一步说明使用不同技术及不同清洗液15的清洗操作,图6到9展示根据不同实施例的操作o104。
[0040]
实施例中所使用的清洗液15可不包含气泡(清洗液15可包含diw、di+o3、di+o、硫酸及tmah中的一或多者)。在图6所展示的一些实施例中,清洗液15包含气泡以增强物理力。例如,如图6中所展示,清洗操作可包含使用di+dib的超高频音波清洗(图6中清洗设备14中的圆圈指示清洗液15中的去离子水气泡)。
[0041]
在图7所展示的一些实施例中,清洗设备14包含在从清洗设备14喷射出清洗液15之前布置于清洗液15的路径中的至少辐射源141(例如uv灯)。在一些实施例中,辐射源141位于清洗设备14的喷嘴的内表面处。例如,如图7中所展示,使用di+o3或diw的uv曝露清洗针对具有较高碳重量百分比的颗粒12。
[0042]
类似于图7中所展示的实施例,为增强物理力且提高清洗效率,清洗液15可包含气泡。在图8所展示的一些实施例中,清洗操作可包含使用di+h2的uv曝露液体清洗(图8中清洗设备14中的圆圈指示清洗液15中的去离子水气泡)。
[0043]
在图9所展示的一些实施例中,清洗操作包含使一个以上清洗设备14朝向颗粒12的位置移动。为了说明,左侧的清洗设备14经重新标记为14a,且右侧的清洗设备14经重新标记为14b。例如,如图9中所展示,由清洗设备14a以倾斜角使用硫酸来化学清洗具有平坦配置及/或有机材料的一些颗粒12以提高移除效率,且使用di+h2的uv曝露液体清洗针对具有鼓起配置的一些颗粒12(图9中清洗设备14中的圆圈指示清洗液15中的去离子水气泡)。在图9所展示的一些实施例中,清洗设备14a及14b可与衬底11的表面s101相距不同距离。
[0044]
因此,可根据颗粒12的不同类型或材料来组合不同技术、不同清洗过程、不同清洗
液15及不同清洗设备14以从衬底11高效率移除颗粒12。为了说明,图4中所展示的清洗设备14及清洗液15用于以下图及描述中。
[0045]
在图10所展示的一些实施例中,清洗方法m10进一步包含操作o105,其在操作o104的清洗操作之后检测衬底11的表面s101上的颗粒12。在一些实施例中,检测操作包含使颗粒识别器13'朝向衬底11的表面s101移动。在一些实施例中,用于检测操作中的颗粒识别器13'与用于操作o102中的颗粒识别器13类似或相同。在一些实施例中,颗粒识别器13'检测先前发现颗粒12的位置而非整个表面s101。在一些实施例中,颗粒识别器13'检测先前发现颗粒12的位置及整个表面s101两者。在一些实施例中,在操作o105之前,清洗方法m10进一步包含将清洗设备14从衬底11移开。
[0046]
根据一些实施例,在操作o105中确定清洗结果。根据不同实施例、不同应用或不同技术代的清洗结果可不同,且其在本文中不受限制。如果清洗结果可接受,那么清洗方法m10结束,但如果清洗结果不可接受(例如,先前检测到的颗粒12未被移除或仅被部分移除,或颗粒12从原检测位置移动而附着到表面s101的其它位置),那么执行操作o104中的清洗操作。详细过程可类似于上文关于操作o102的说明,在操作o105中识别颗粒12的位置。例如,颗粒12的位置可由颗粒识别器13'在操作o105中所取得的图像识别。
[0047]
在一些实施例中,可执行多次清洗操作。如果清洗结果不可接受,那么在操作o105之后再次执行操作o104中所说明的清洗操作。为便于说明,操作o104中所执行的清洗操作称为第一清洗操作,且操作o105中的检测操作之后所执行的清洗操作称为第二清洗操作。在一些实施例中,在第一清洗操作中根本没移除颗粒12,且在操作o105之后执行使用不同清洗设备14及/或不同清洗液15的第二清洗操作。在一些实施例中,第一清洗操作包含超高频音波清洗,且第二清洗操作包含uv曝露液体清洗。在一些实施例中,第一清洗操作使用di+dib,且第二清洗操作使用tmah。另外,第二清洗操作的持续时间可不同于第一清洗操作的持续时间。
[0048]
在一些实施例中,通过第一清洗操作部分移除颗粒12,且在操作o105中检测到颗粒12的部分(或较小颗粒12)且清洗结果不可接受。执行第二清洗操作,且第二清洗操作的持续时间小于第一清洗操作的持续时间。在一些实施例中,在第一清洗操作中根本没移除颗粒12,且第二清洗操作的持续时间长于或等于第一清洗操作的持续时间。例如,单个清洗操作的持续时间是在5秒到300秒的范围内,且第二清洗操作的持续时间可基于操作o105的检测来调整。在一些实施例中,将针对颗粒12的不同材料及/或配置的清洗操作的持续时间及次数记录为用于进一步调整的反馈。
[0049]
根据本发明的一些实施例,清洗方法m10应用于光掩模11的护膜112,如先前段落中所描述且如图2到5及10中所说明。清洗方法m10可高效率移除表面s101上的颗粒12且有效减少因为清洗操作的护膜112损坏。另外,清洗方法m10可由一或多个电子器件执行,且与常规手动清洗过程相比可减少处理时间及提高效率。本发明实施例的清洗方法m10还可应用于半导体制造、光掩模制造或常规光掩模清洗过程的不同阶段中。根据清洗方法m10的不同应用,衬底11可指上文所说明的光掩模的护膜112、光掩模的光掩模衬底111或半导体衬底。
[0050]
图11到12展示根据其它实施例的示意图。为便于说明及理解,在以下说明中,仅提供与先前所说明的实施例的差异,且为简洁起见,省略类似特征或类似技术的应用。
[0051]
在图11所展示的一些实施例中,衬底11是半导体衬底,且清洗方法m10应用于半导体制造中。在一些实施例中,衬底11称为半导体衬底11a,且表面s101是半导体衬底11a的顶面s11a或半导体衬底11a上方的图案化层的顶面s11a。顶面s11a还可称为图案化表面s11a。在一些实施例中,颗粒12是来自半导体制造中的一或多个先前操作的残留物。在一些实施例中,在光刻及/或蚀刻工艺之后对半导体衬底11a执行操作o102到o104。本发明实施例的清洗方法m10可应用于半导体制造的任何清洗阶段中。在一些实施例中,在光刻工艺之后执行操作o102到o104。例如,对半导体衬底11a上方的图案化抗蚀剂层的顶面s11a执行操作o102到o104。在一些实施例中,在蚀刻工艺之后执行操作o102到o104。例如,对半导体衬底11a上方的图案化目标层(例如图案化硬屏蔽层或图案化材料层)的顶面s11a执行操作o102到o104。
[0052]
在图12所展示的一些实施例中,衬底11是光掩模的光掩模衬底111,且清洗方法m10应用于光掩模制造或光掩模的维护过程中。在一些实施例中,衬底11的表面s101是光掩模衬底111的图案113的顶面s101',其面向光掩模的护膜112(将安装于光掩模衬底111上)。顶面s101'还可称为图案化表面s101'。在图12所展示的一些实施例中,图案113由光掩模衬底111的透明板上的图案化遮蔽层界定。一或多个颗粒12位于光掩模衬底111的顶面s101'上,且对光掩模衬底111执行操作o102到o104。
[0053]
在一些实施例中,因为衬底11的倒转清洗过程、清洗操作中的清洗液15反重力喷射方向及清洗液15的流速的控制而减少衬底11的表面s101(例如光掩模衬底111的顶面s101')受损。在一些实施例中,可因为清洗液15的反重力喷射方向上的重力的综合优点而防止由清洗操作所致的光掩模衬底111的破坏或散射条丢失。
[0054]
在一些实施例中,清洗方法m10应用于光掩模制造中。在一些实施例中,在操作o102到o105之前执行图案化光掩模衬底111以形成图案113的操作。在一些实施例中,如果清洗结果可接受,那么在操作o105之后执行将衬底11的护膜112(例如一些实施例中的光掩模)附着到光掩模衬底111的操作,借此形成类似于图2中所展示的衬底11的光掩模。应用清洗方法m10以移除由用于形成图案113的光刻工艺及/或蚀刻工艺所致的颗粒12。
[0055]
在一些实施例中,当在光掩模的维护过程(例如例行清洗过程)期间应用清洗方法m10时,清洗方法m10进一步包含在操作o101之后从光掩模的光掩模衬底111移除护膜112。在一些实施例中,清洗方法m10进一步包含在操作o102之前曝露光掩模衬底111的顶面s101',其中颗粒12位于光掩模衬底111的顶面s101'上。应用清洗方法m10来移除颗粒12,颗粒12(例如)在针对将图案113转印到半导体衬底或半导体衬底上方的层所执行的光刻工艺期间通过光掩模的框架结构上的过滤器(未展示)。
[0056]
根据本发明的一些实施例,提供并入清洗方法m10的半导体制造方法m20。图13是说明方法m20的流程图。方法m20包含:(o201)接收具有表面的光掩模;(o202)识别颗粒在光掩模的表面上的位置;(o203)使清洗设备朝向颗粒的位置移动;(o204)执行清洗操作,借此通过从清洗设备喷射对抗重力且朝向光掩模的表面流动的清洗液来移除颗粒;(o207)将光掩模的图案转印到半导体衬底。在一些实施例中,类似于清洗方法m10,方法o20中视情况包含在操作o104之后检测衬底的表面的操作o205及确定清洗结果是否可接受的操作o206,其取决于不同实施例。操作o201到o206类似于操作o101到o105,且在此省略重复说明。在一些实施例中,在操作o207之前执行操作o201到o204(或o201到o206)。在一些实施例中,在操作
o207之后执行操作o201到o204(或o201到o206)。在一些实施例中,在操作o201到o206之前执行操作o207,过程推进到下一过程或结束,其取决于不同应用。
[0057]
在一些实施例中,在利用光掩模的光刻工艺(即,操作o207)之前将操作o202到o204(及视情况操作o205到o206)应用于光掩模。在一些实施例中,对半导体衬底(例如半导体衬底11a)执行光刻工艺及在光刻工艺之前应用操作o202到o204可防止由污染光掩模(例如图2或12中所展示的光掩模)所致的半导体衬底上的缺陷。在一些实施例中,在光刻工艺(即,操作o207)之后将操作o202到o204(及视情况操作o205到o206)应用于光掩模,使得可实时移除来自光刻工艺的污染物。在一些实施例中,方法m20可进一步包含在操作o202之前剥离护膜112及/或曝露光掩模衬底111的顶面s101',其取决于所应用的光刻技术。在一些实施例中,将光掩模用于euv(极紫外线)光刻操作中(即,护膜112在过程期间不附着于光掩模衬底111上),且对光掩模衬底111执行操作o202到o204(及视情况操作o205到o206)。在一些实施例中,将光掩模用于uv(紫外线)光刻操作中(即,护膜112在过程期间保留于光掩模衬底111上),且对护膜112且视情况对光掩模衬底111执行操作o202到o204(及视情况操作o205到o206)。在一些实施例中,在操作o204之后(或在操作o206之后)将护膜112重新附着到光掩模衬底111。
[0058]
在一些实施例中,在第一腔室中执行操作o202到o205,且在不同于第一腔室的第二腔室中执行操作o207。在一些实施例中,由控制单元(未展示)执行操作o206。在一些实施例中,方法m20进一步包含在操作o204之后或在清洗结果可接受时将光掩模移动到另一腔室以执行操作o207。在图14所展示的一些实施例中,对半导体衬底11a执行过程pt,借此形成面向上的图案化表面s11a。在过程pt是光刻工艺的一些实施例中,图案化表面s11a是半导体衬底11a的图案化抗蚀剂层的表面。在过程pt是蚀刻工艺的一些实施例中,图案化表面s11a是半导体衬底11a的图案化目标层的表面。在一些实施例中,方法m20进一步包含翻转半导体衬底11a,其中半导体衬底11a的图案化表面s11a向下面向清洗设备14,如图14中所展示。
[0059]
在本发明的另一实施例中,提供用于清洗衬底的系统a10。图15展示根据一些实施例的系统a10的示意图。系统a10包含衬底固持器21、衬底传感器22、颗粒识别器23及清洗设备24。衬底固持器21经配置以固持衬底11。如果衬底11固持于衬底固持器21上,那么衬底传感器22经配置以检测衬底11。颗粒识别器23经配置以识别颗粒12在衬底11的表面s101上的位置。清洗设备24经配置以通过喷射对抗重力且朝向衬底11的表面s101流动的清洗液15来对衬底11的表面s101的位置执行清洗操作。图15展示衬底11是光掩模且包含光掩模衬底111及护膜112,其中其上附着颗粒12的表面s101是护膜112的外表面。图15仅供说明,且不希望限制本发明实施例。
[0060]
在一些实施例中,衬底固持器21包含载物台211及连接到载物台211的至少固持器212。在一些实施例中,固持器212经布置以固持衬底11的外围,如图16到17中所展示,图16到17说明具有及不具有衬底11的衬底固持器21的仰视图。在一些实施例中,衬底传感器22包含信号发射器221及信号接收器222,其在衬底11固持于位置处时布置于衬底固持器21的两个相对侧上或衬底11的两个相对侧上。在一些实施例中,信号发射器221及信号接收器222能够发射及接收包含光信号、激光、电子束、红外光或其它适合类型的信号的信号。在一些实施例中,信号发射器221及信号接收器222分别为红外发射器及红外接收器。
[0061]
在一些实施例中,发射器221及信号接收器222定位于固持器212的两个相对侧及载物台211的相同侧处。信号发射器221经配置以朝向信号接收器222发射信号,且信号接收器222经配置以接收在载物台211上方及固持器212之间传递的信号。如果衬底11保持于信号发射器221与信号接收器222之间的信号路径上的适当位置中,那么检测信号强度的变化。衬底11固持于载物台211上时所接收的信号应弱于衬底固持器21空载时所接收的信号,其因为信号路径上的衬底11的干扰。如图16中所展示,当衬底固持器21空载时,来自信号发射器221的信号不受衬底11干扰地穿行于固持器212之间,且所接收的信号与从信号发射器221发射的信号基本上相同。图16中将信号展示为带箭头虚线,箭头展示信号的方向,且虚线的粗细指示信号的强度全然或几乎没改变。如图17中所展示,当衬底11保持于适当位置中时,来自信号发射器221的信号穿过衬底11且由衬底11衰减。图17中将信号展示为带箭头虚线,箭头展示信号的方向,且虚线的粗细变化指示在信号接触衬底11时信号的强度减弱。
[0062]
在一些实施例中,颗粒识别器23类似于颗粒识别器13。在一些实施例中,清洗设备24类似于清洗设备14。在此省略重复说明。在一些实施例中,颗粒识别器23经配置以在清洗操作之后再次检测衬底11的表面s101的位置。
[0063]
在一些实施例中,系统a10进一步包含通信或电连接到衬底传感器22、颗粒识别器23及清洗设备24的处理器25。在一些实施例中,处理器25包含cpu(中央处理单元)。在一些实施例中,处理器25包含用户接口以展示整个系统a10及/或系统a10的每一装置的数据及状况。在一些实施例中,将由颗粒识别器23获取的图像发送到处理器25且在处理器25中执行图像识别以识别颗粒12的位置。在一些实施例中,处理器25经配置以监测及控制上文所说明的操作o101到o105(或操作o201到o205)、操作o101到o105(或操作o201到o205)的子操作及/或其它任选操作的序列及时序。在一些实施例中,处理器25经配置以识别颗粒12在表面s101上的位置且发送信号以控制清洗设备24的移动。在一些实施例中,处理器25还经配置以确定清洗结果可接受且发送信号以控制颗粒识别器23及清洗设备24的移动。
[0064]
在一些实施例中,系统a10进一步包含识别器电机26,其电连接到颗粒识别器23以在过程期间控制颗粒识别器23的移动及位置。在一些实施例中,识别器电机26经配置以在操作o101或操作o201之后从处理器25接收指令。在一些实施例中,系统a10进一步包含清洗器电机27,其电连接到清洗设备24以在过程期间控制清洗设备24的移动及位置。在一些实施例中,清洗器电机27经配置以在操作o103或操作o203中从处理器25接收指令。在一些实施例中,系统a10进一步包含连接到清洗设备24的储槽28。在一些实施例中,储槽28由管连接到清洗设备24。储槽28经配置以在清洗液15流入到清洗设备24中之前容纳及/或混合清洗液15。
[0065]
本发明的一些实施例提供一种应用于半导体制造中的清洗方法。所述方法包含:接收具有表面的衬底;识别颗粒在所述衬底的所述表面上的位置;使清洗设备朝向所述颗粒的所述位置移动;及执行清洗操作,借此通过从所述清洗设备喷射对抗重力且朝向所述衬底的所述表面流动的清洗液来移除所述颗粒。
[0066]
本发明的一些实施例提供一种半导体制造方法。所述半导体制造方法包含:接收具有表面的光掩模;识别颗粒在所述光掩模的所述表面上的位置;使清洗设备朝向所述颗粒的所述位置移动;执行清洗操作,借此通过从所述清洗设备喷射对抗重力且朝向所述光掩模的所述表面流动的清洗液来移除所述颗粒;及将所述光掩模的图案转印到半导体衬
底。
[0067]
本发明的一些实施例提供一种用于清洗衬底的系统。所述系统包含:衬底固持器,其经配置以固持所述衬底;衬底传感器,其经配置以检测所述衬底;颗粒识别器,其经配置以识别颗粒在所述衬底的表面上的位置;及清洗设备,其经配置以通过喷射对抗重力且朝向所述衬底的所述表面流动的清洗液来对所述衬底的所述表面的所述位置执行清洗操作。
[0068]
上文概述若干实施例的结构,使得所属领域的技术人员可优选理解本发明实施例的方面。所属领域的技术人员应了解,其可易于将本发明实施例用作用于设计或修改用于实施相同目的及/或实现本文中所引入的实施例的相同优点的其它过程及结构的基础。所属领域的技术人员还应意识到,这些等效建构不应背离本发明实施例的精神及范围,且其可在不背离本发明实施例的精神及范围的情况下对本文作出各种改变、替换及更改。
[0069]
符号说明
[0070]
11 衬底/光掩模
[0071]
11a 半导体衬底
[0072]
12 颗粒
[0073]
12a 颗粒
[0074]
12b 颗粒
[0075]
13 颗粒识别器
[0076]
13' 颗粒识别器
[0077]
14 清洗装置
[0078]
14a 清洗装置
[0079]
14b 清洗装置
[0080]
15 清洗液
[0081]
21 衬底固持器
[0082]
22 衬底传感器
[0083]
23 颗粒识别器
[0084]
24 清洗装置
[0085]
25 处理器
[0086]
26 识别器电机
[0087]
27 清洗器电机
[0088]
28 储槽
[0089]
111 光掩模衬底
[0090]
112 护膜
[0091]
113 图案
[0092]
141 辐射源
[0093]
211 载物台
[0094]
212 固持器
[0095]
221 信号发射器
[0096]
222 信号接收器
[0097]
a10 系统
[0098]
m10 清洗方法
[0099]
m20 半导体制造方法
[0100]
o101 操作
[0101]
o102 操作
[0102]
o103 操作
[0103]
o104 操作
[0104]
o105 操作
[0105]
o201 操作
[0106]
o202 操作
[0107]
o203 操作
[0108]
o204 操作
[0109]
o205 操作
[0110]
o206 操作
[0111]
o207 操作
[0112]
pt 过程
[0113]
s11a 顶面/图案化表面
[0114]
s101 表面
[0115]
s101' 顶面/图案化表面
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1