一种尾部胶设备的制作方法
[0001]
本发明属于锂离子电芯贴胶设备技术领域,具体为一种尾部胶设备。
背景技术:
[0002]
点胶在行业应用中,所有用于胶水的点,涂,喷,灌,洒的机器设备,都统称为点胶设备。点胶设备的应用十分广泛,它已经十分广泛到工业生产中涉及点胶工艺以及流体控制的任何工序。半自动点胶可设定手动和脚踏两种模式,可定量出胶,每次出胶量一致,操作简单,并具有真空回吸功能可调节负压至0.6公斤,以保证浓度较低的胶水不会产生滴漏现象,亦可防止浓度较高的胶水出现拉丝现象。可注滴的液体包括快干胶、红胶、厌氧胶、黑胶、硅胶、smt红胶、黄胶、银胶、矽胶、环氧树脂、螺丝锁紧胶、润滑油、助焊剂。适用的产品主要有:smt产品加工、产品绑定封胶,led光电产品、商标标牌、五金精密模具、电机马达、光学仪器、手机、开关及连接器、电子玩具、喇叭、蜂鸣器、电子元器件等产品的生产。
[0003]
但是常见的尾部胶设备在使用时,不能对原料进行整形,从而使得原料生产的品质参差不齐,影响了产品的质量,同时普通的尾部胶设备在使用时,需要人力进行原材料的搬运,从而加重了人们的劳动负担。
技术实现要素:
[0004]
本发明的目的在于:为了解决上述提出的问题,提供一种尾部胶设备。
[0005]
本发明采用的技术方案如下:一种尾部胶设备,包括下机架,其特征在于:所述下机架的上表面焊接有机台板,所述机台板的左侧上方边缘处固定有进料ng拉带,所述机台板的上表面中部固定安装有转盘机构,所述转盘机构的左下侧设置有进料拉带和压两侧机构,所述进料拉带和压两侧机构的顶部固定安装有机器人耳朵整形机构,所述机台板的上表面位于所述转盘机构的下方固定安装有进料搬运机器人,所述进料搬运机器人的左侧末端固定安装有出料搬运机构,所述进料搬运机器人的右侧末端设置有进料拉带,所述机台板的上表面位于所述转盘机构的右上方固定安装有裹胶机构,所述裹胶机构的尾部末端设置有贴胶搬运,所述贴胶搬运的右侧边缘处固定安装有双飞达机构,所述机台板位于所述双飞达机构的后部设置有中转平台,所述中转平台的后部固定安装有进料搬运,所述下机架的右下方固定安装有进料拉带。。
[0006]
在一优选的实施方式中,所述进料搬运的左右两侧边缘处焊接有进料搬运机器人两个,所述进料搬运机器人的顶部焊接有安装板,且安装板的作用两个设置有调速电机,所述进料搬运的上表面左侧固定安装有防护罩,所述防护罩的直径比所述调速电机的直径要大。
[0007]
在一优选的实施方式中,所述机器人耳朵整形机构的底部设置有稳定支架,所述防护罩的顶部固定安装有转盘机构,所述皮带的顶端设置有转动轴,所述固定底板的外部焊接有连接臂,且连接臂的一端设置有光源。
[0008]
在一优选的实施方式中,所述光源的底部末端固定安装有搬运底座,所述搬运底
座的底部设置有锁紧卡扣,所述光源远离所述搬运底座的一端设置有机器人,所述机器人的外部设置有操作把手。
[0009]
在一优选的实施方式中,所述中转平台的上表面焊接有固定立板,且立板的左侧固定安装有进料拉带,立板的右侧座固定安装有电芯,所述电芯的上方固定安装有机台板,所述机台板的左右两侧末端开设有与安装位置相适配的孔。
[0010]
在一优选的实施方式中,所述下机架的上表面的立板的顶部规定安装有胶纸检测,所述的侧边固定安装有dd马达,所述胶纸检测的上表面固定安装有飞达底座,立板的另一侧固定安装有放胶轮,所述飞达底座与所述放胶轮之间设置有放胶电机。
[0011]
在一优选的实施方式中,所述裹胶机构的底部设置有压缩弹簧,所述压缩弹簧的上表面焊接有安装钢板两个,且每个安装钢板的外侧表面固定安装有送胶轮,所述送胶轮的后方固定安装有左飞达,所述左飞达的内部设置有速度调节电阻,所述左飞达的下方设置有右飞达。
[0012]
在一优选的实施方式中,所述压缩弹簧的上表面右下方固定安装有右压块,所述-右压块的顶部固定安装有左压块,所述左压块的内部设置有激光电子街校准机构。
[0013]
在一优选的实施方式中所述贴胶搬运的上表面固定安装有放置盘六个,所述贴胶搬运的下方固定安装有驱动电机,所述驱动电机的末端设置有传动轴,且传动轴的转动部分与所述贴胶搬运的底部卡接,所述贴胶搬运的下表面四周焊接有固定腿。
[0014]
在一优选的实施方式中,所述下机架的底部正面开设有放置仓,且放置仓的外部固定安装有开合箱门,且箱门的外部固定安装有观察窗两个。
[0015]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0016]
1、本发明中,耳朵整形工位配合第一整形块和第二整形块可以对生产过程中的品相不好的原材料电芯进行修剪,从而可以避免了参差不齐的电芯被生产出来,从而提高了该产品的品质,同时,挤压头和整形块修剪之间的距离规格可以通过调节旋钮进行调整,并且操作简便易于操作,提高了该装置使用时的便利性。
[0017]
2、本发明中,设置的机器人搬运机构可以自动对原材料进行搬运,避免了工作人员搬运原材料,同时设置的双飞达机构,当有一边飞达上的物料耗尽时机器人可到另外一边取胶纸,缺料的飞达更换胶纸完成不影响机器正常运作,从而使得工作人员不需要进行频繁地取胶纸取胶纸时的操作,从而减轻了工作人员的劳动负担。
附图说明
[0018]
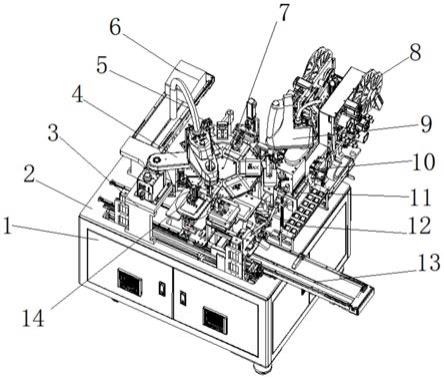
图1为本发明的结构立体图;
[0019]
图2为本发明中ng拉带立体图;
[0020]
图3为本发明中机器人搬运机构立体图;
[0021]
图4为本发明中耳朵整形工位立体图;
[0022]
图5为本发明中双飞达机构立体图;
[0023]
图6为本发明中转动台立体图。
[0024]
图中标记:1、下机架-2、机台板-3、出料搬运机构-4、压两侧机构-5、耳朵整形机构-6、ng拉带-7、转盘机构-8、裹胶机构-9、贴胶搬运-10、双飞达机构-11、中转平台-12、进料搬运-13、进料拉带-14、进料搬运机器人-15、防护罩-16、调速电机-17、皮带-18、固定底
板-19、机器人-20、光源-21、底座-22、电芯-23、dd马达-24、胶纸检测-25、飞达底座-26、放胶电机-27、放胶轮-28、收胶轮-29、左飞达-30、右飞达-31、左压块-32、右压块-33、压缩弹簧、34-放置盘、35-驱动电机。
具体实施方式
[0025]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0026]
参照图1-6,一种尾部胶设备,包括下机架1,下机架1的底部正面开设有放置仓,且放置仓的外部固定安装有开合箱门,且箱门的外部固定安装有观察窗两个;下机架1的上表面的立板的顶部规定安装有胶纸检测24,24的侧边固定安装有dd马达23,胶纸检测24的上表面固定安装有飞达底座25,立板的另一侧固定安装有放胶轮27,飞达底座25与放胶轮27之间设置有放胶电机26;下机架1的上表面焊接有机台板2,机台板2的左侧上方边缘处固定有进料ng拉带6,机台板2的上表面中部固定安装有转盘机构7,转盘机构7的左下侧设置有进料拉带和压两侧机构4,进料拉带和压两侧机构4的顶部固定安装有机器人耳朵整形机构5,机器人耳朵整形机构5的底部设置有稳定支架,防护罩15的顶部固定安装有转盘机构7,皮带17的顶端设置有转动轴18,固定底板18的外部焊接有连接臂,且连接臂的一端设置有光源20;机台板2的上表面位于转盘机构7的下方固定安装有进料搬运机器人14,进料搬运机器人14的左侧末端固定安装有出料搬运机构3,进料搬运机器人14的右侧末端设置有进料拉带13,机台板2的上表面位于转盘机构7的右上方固定安装有裹胶机构8,裹胶机构8的底部设置有压缩弹簧33,压缩弹簧33的上表面焊接有安装钢板两个,且每个安装钢板的外侧表面固定安装有送胶轮28,送胶轮28的后方固定安装有左飞达29,左飞达29的内部设置有速度调节电阻,左飞达29的下方设置有右飞达30;裹胶机构8的尾部末端设置有贴胶搬运9,贴胶搬运9的上表面固定安装有放置盘34六个,贴胶搬运9的下方固定安装有驱动电机35,驱动电机35的末端设置有传动轴,且传动轴的转动部分与贴胶搬运9的底部卡接,贴胶搬运9的下表面四周焊接有固定腿36;贴胶搬运9的右侧边缘处固定安装有双飞达机构10,机台板2位于双飞达机构10的后部设置有中转平台11,中转平台11的上表面焊接有固定立板,且立板的左侧固定安装有进料拉带13,立板的右侧座固定安装有电芯22,电芯22的上方固定安装有机台板2,机台板2的左右两侧末端开设有与安装位置相适配的孔;中转平台11的后部固定安装有进料搬运12,进料搬运12的左右两侧边缘处焊接有进料搬运机器人14两个,进料搬运机器人14的顶部焊接有安装板,且安装板的作用两个设置有调速电机16,进料搬运12的上表面左侧固定安装有防护罩15,防护罩15的直径比调速电机16的直径要大;下机架1的右下方固定安装有进料拉带13,压缩弹簧33的上表面右下方固定安装有右压块32,-右压块32的顶部固定安装有左压块31,左压块31的内部设置有激光电子街校准机构。
[0027]
工作原理:该尾部胶设备使用时,包括以下步骤:在进料搬运机构处,先将电芯进料到进料拉带和中转平台位置,在取料上升,并旋转180
°
,并进料搬运机构下降取电芯,将电芯搬运至入料中转位,并将电芯放下;电机主动放料备胶,同时收底纸料筒主动收料;压舌压紧胶纸,往前拉胶;拉胶送至支撑平台上方,平台上升拖住胶纸;吸盘压住支撑平台端的胶纸,松开压舌,向后拉胶;拉胶到位后,机构上升,便于吸附胶纸,压舌压紧,切刀切断胶
纸;然后切断胶纸后,机器人取胶离开;机器人取胶进行ccd拍照定位;贴胶下支撑上升,机器人补偿位置后,进行尾部贴胶;再进行极耳整形,此时先打开耳朵整形工位11,转盘到位;胶带检测和压住电芯;裹胶机构前进;打开裹胶机构复位;接着再整形模块控制转盘到位;之后整形机构顶升下滚轮向上整形机构复位;最后再进行耳朵整形,耳朵整形模块;先将转盘到位;载压住电芯、整形机构前进;下滚轮向上整形;下滚轮下撤,上滚轮向下整形;结束之后进行机构复位;处理结束之后,准备出料;打开ok&ng出料模块备用,操作机器人出料,控制ng电芯旋转放至ng流水线;将ok电芯放至出料中转平台;通过下料机械手转移至出料流水线。
[0028]
该尾部胶设备中,耳朵整形工位11配合第一整形块24和第二整形块27可以对生产过程中的品相不好的原材料电芯进行修剪,从而可以避免了参差不齐的电芯被生产出来,从而提高了该产品的品质,同时,挤压头25和整形块修剪26之间的距离规格可以通过调节旋钮23进行调整,并且操作简便易于操作,提高了该装置使用时的便利性。
[0029]
该尾部胶设备中,设置的机器人搬运机构5可以自动对原材料进行搬运,避免了工作人员搬运原材料,同时设置的双飞达机构8,当有一边飞达上的物料耗尽时机器人可到另外一边取胶纸,缺料的飞达更换胶纸完成不影响机器正常运作,从而使得工作人员不需要进行频繁地取胶纸取胶纸时的操作,从而减轻了工作人员的劳动负担。
[0030]
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1