10kV开关柜辅助操作机器人的制作方法
10kv开关柜辅助操作机器人
技术领域
1.本实用新型提供一种10kv开关柜辅助操作机器人,属于国家电网安全设施领域。
背景技术:
2.现在10kv开关柜的操作,在电动分合闸失灵的情况下,需要使用操作把手进行断路器(负荷开关)、隔离开关、接地刀闸的分合操作(旋转一定的角度)和摇入、摇出小车开关的操作,由于环网柜母线或者进线电缆头可能是带电的,操作人员靠近柜子操作,非常危险,无法保证在操作的瞬间,环网柜或者电缆会不会故障,《配电安规》规定,室外环境下,人员需要离开10kv接地点8米以外,可见操作人员一旦操作过程中发生了环网柜接地或电缆终端头接地,人员距离柜子或电缆只有1m左右,人员将发生触电伤亡。
技术实现要素:
3.本实用新型的目的是提供一种能克服上述缺陷的10kv开关柜辅助操作机器人,通过遥控机器人完成无接触操作,避免人员触电伤亡。
4.为实现上述目的,本实用新型所提供的一种10kv开关柜辅助操作机器人,包括箱体,所述箱体内设有可伸缩的机器人、锂电池、连接线、控制器;所述机器人可从箱体中取出伸展,所述机器人包括伸缩腿和驱动机构,所述驱动机构设置在伸缩腿上,驱动机构通过连接线与箱体内锂电池连接,所述驱动机构控制开关柜开关状态,控制器与驱动机构、锂电池连接,所述蜗轮两侧分别设有照明灯和摄像头。
5.优选的,所述驱动机构包括壳体,所述壳体中间设有蜗轮,所述蜗轮与壳体内直流减速电机啮合,所述蜗轮与通用的单向出轴固定连接。
6.优选的,所述壳体上设有电磁操作模块,所述电磁操作模块设有顶出端。
7.优选的,外壳背部设有调节按钮,分别用于调节直流减速电机力矩转速。
8.优选的,所述电磁操作模块包括电磁铁,所述电磁铁顶动断路器的分闸手动按钮,完成断路器的紧急分闸操作。
9.优选的,电磁铁顶杆的前端部为非尖端形状,后端部安装有机械复位装置;电磁铁在复位装置作用下自动复位。
10.优选的,所述电磁操作模块包括运动单元、上固定座、上电磁铁、套筒、下电磁铁、下固定座、u形块、弹簧板和弹簧;其中上固定座、上电磁铁、套筒、下电磁铁、下固定座、 u形块依次自上而下固连在一起;所述弹簧安装在u形块底部,弹簧板在远离u形块底部的一端与所述弹簧固定连接;所述运动单元进一步包括依次自上而下固定连接的上电磁铁顶杆,运动电磁铁和下电磁铁顶杆,进一步在所述运动电磁铁的上端面和下端面分别设置上缓冲垫和下缓冲垫,所述上缓冲垫、运动电磁铁和下缓冲垫设置在套筒的空腔中,所述上电磁铁顶杆贯穿所述上固定座和上电磁铁,所述下电磁铁顶杆贯穿所述下电磁铁和下固定座;所述运动电磁铁的极性可变,所述上电磁铁和下磁铁的极性固定且相反,通过改变运动电磁铁的极性改变其与上电磁铁和下电磁铁之间的受力,带动上电磁铁顶杆在套筒中运动,从
而实现电磁铁顶杆的伸缩功能。
11.优选的,所述上固定座和下固定座的中间为锯齿状的孔,采用继电器控制所述运动电磁铁极性的改变。
12.优选的,还包括遥控pad,所述遥控pad通过无线传输控制所述机器人。
13.与现有技术相比,本实用新型的有益效果是:
14.本实用新型可利用配电网高低压开关操作机器人代替运行人员,执行柜前停送电操作,包括就地电动操作和就地手动操作,完全避免运行人员受到电弧伤害,并且降低运行人员劳动强度;
15.本实用新型可以精准控制手动操作把手旋转角度和速度,最大限度减少对开关旋转机构、动静触头的电弧灼伤;针对高压柜,可选择启用五防闭锁功能,停电顺序是:断路器—电源侧隔离开关—负荷侧隔离开关,送电顺序相反,并通过与带电指示器配合杜绝带电合接地刀闸等恶性事故。
附图说明
16.图1是本实用新型的结构示意图;
17.图2是本实用新型驱动机构结构示意图;
18.图3是本实用新型驱动机构结构示意图应用示意图;
19.图4是本实用新型电磁操作模块结构示意图;
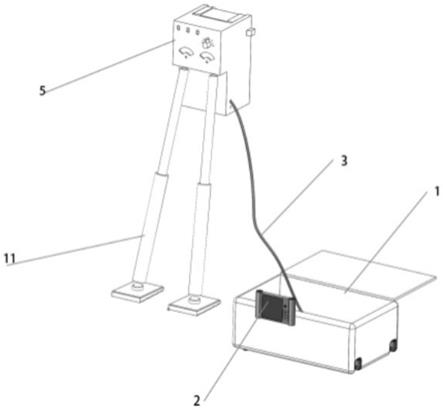
20.图5是本实用新型立体图;
21.图6是本实用新型实施例应用图;
22.图7是本实用新型实施例应用图ii;
23.其中:1、箱体;2、遥控pad;3、连接线;4、电磁操作模块;5、驱动机构;6、壳体; 7、照明灯;8、单向出轴;9、蜗轮;10、摄像头;11、伸缩腿;12、调节按钮;41、上电磁铁顶杆;42、上固定座;43、上电磁铁;44、上缓冲垫;45、运动电磁铁;46、下缓冲垫; 47、套筒;48、下电磁铁顶杆;49、下电磁铁;410、下固定座;411、u形块;412、弹簧板; 413、弹簧;
具体实施方式
24.实施例1
25.如图1
‑
2所示,下面结合附图对本实用新型作进一步说明:本实用新型所述的一种10kv 开关柜辅助操作机器人,包括箱体1,所述箱体1内设有可伸缩的机器人、锂电池、连接线3、控制器;所述机器人可从箱体1中取出伸展,所述机器人包括伸缩腿11和驱动机构5,所述驱动机构5设置在伸缩腿11上,驱动机构5通过连接线3与箱体1内锂电池连接,所述驱动机构5控制开关柜开关状态,控制器与驱动机构、锂电池连接,所述蜗轮9两侧分别设有照明灯7和摄像头10。
26.所述驱动机构5包括壳体6,所述壳体6中间设有蜗轮9,所述蜗轮与壳体6内直流减速电机啮合,所述蜗轮9与通用的单向出轴8固定连接。所述壳体6上设有电磁操作模块4,所述电磁操作模块4设有顶出端。外壳6背部设有调节按钮12,分别用于调节直流减速电机力矩转速。所述电磁操作模块4包括电磁铁,所述电磁铁顶动断路器的分闸手动按钮,完成断路器的紧急分闸操作。
27.电磁铁顶杆的前端部为非尖端形状,后端部安装有机械复位装置;电磁铁在复位装置作用下自动复位。电磁操作模块4包括运动单元、上固定座42、上电磁铁43、套筒47、下电磁铁49、下固定座410、u形块411、弹簧板412和弹簧413;其中上固定座42、上电磁铁 43、套筒47、下电磁铁49、下固定座410、u形块411依次自上而下固连在一起;所述弹簧 413安装在u形块411底部,弹簧板412在远离u形块411底部的一端与所述弹簧413固定连接;所述运动单元进一步包括依次自上而下固定连接的上电磁铁顶杆41,运动电磁铁45 和下电磁铁顶杆48,进一步在所述运动电磁铁45的上端面和下端面分别设置上缓冲垫44 和下缓冲垫46,所述上缓冲垫44、运动电磁铁45和下缓冲垫46设置在套筒47的空腔中,所述上电磁铁顶杆41贯穿所述上固定座42和上电磁铁43,所述下电磁铁顶杆48贯穿所述下电磁铁49和下固定座410;所述运动电磁铁45的极性可变,所述上电磁铁43和下磁铁49的极性固定且相反,通过改变运动电磁铁45的极性改变其与上电磁铁43和下电磁铁 49之间的受力,带动上电磁铁顶杆41在套筒47中运动,从而实现电磁铁顶杆41的伸缩功能。
28.优选的,所述上固定座42和下固定座410的中间为锯齿状的孔,采用继电器控制所述运动电磁铁45极性的改变。
29.提供一种10kv开关柜辅助操作机器人操作方法,其特征在于,包括以下步骤:
30.在拉杆箱内取出遥控pad、机器人;将机器人的2条支架展开,将单向出轴插到开关的操作孔中;将机器人的电源线与拉杆箱内锂电池连接;遥控pad开机,进行自检;根据开关柜的型号,在pad上设定分闸或合闸的力矩、转速、旋转角度参数;操作人员离开柜体,8米,通过pad一键分闸或合闸,同时通过摄像头观察是否分合到位;通过pad控制电磁铁,点动,分闸或合闸;操作完毕,收起整个机器人。
31.本实用新型搬运过程中,遥控pad和机器人可以收纳在拉杆箱内。拉杆箱内的锂电池,采用48v三元锂20ah遥控pad带录像和遥控功能,下的分合闸命令可调节电机旋转方向和旋转时间,支持点动和持续旋转。电磁操作模块按压分闸或合闸按钮,收到来自遥控pad操作命令时,操作杆弹出一下,模拟人手按压一下。通过3个指示灯表示电量、过负荷保护、自检灯,绿色表示正常、红色表示异常。本实用新型代替运行人员,执行柜前停送电操作,包括就地电动操作和就地手动操作,完全避免运行人员受到电弧伤害,并且降低运行人员劳动强度;可以精准控制手动操作把手旋转角度和速度,最大限度减少对开关旋转机构、动静触头的电弧灼伤;针对高压柜,可选择启用五防闭锁功能,停电顺序是:断路器—电源侧隔离开关—负荷侧隔离开关,送电顺序相反,并通过与带电指示器配合杜绝带电合接地刀闸等恶性事故。
32.当电磁操作模从复位状态需要伸出电磁铁顶杆41时,弹簧推动弹簧板伸出运动,从而推动电磁铁顶杆伸出运动,同时通过控制系统调节运动电磁铁的极性变为与其缩回运动时相反的极性,以使上电磁铁与运动电磁铁之间形成引力,下电磁铁与运动电磁铁之间形成斥力,从而使得电磁铁顶杆伸出运动。
33.当电磁铁顶杆伸出后需要缩回运动时,运动电磁铁的极性变为与其伸出运动时相反的极性,上电磁铁与运动电磁铁之间形成斥力,下电磁铁与运动电磁铁之间形成引力,使得电磁铁顶杆缩回运动。为了防止电磁铁顶杆与下电磁铁发生剧烈的碰撞,在u形块中设置有弹簧,当电磁铁顶杆运动到一定位置时会与弹簧板接触,弹簧对运动单元具有一定的缓冲作用,直到电磁铁顶杆复位。
34.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1