离子植入机的制作方法
1.本案是关于一种离子植入机。
背景技术:
2.离子植入(ion implantation)为半导体制造的关键制程。离子植入法将游离化的掺杂物质于电场中加速后打入晶圆,以改变晶圆的电气性质。
3.离子植入执行前必须对晶圆进行前置作业,例如进行晶圆晶格校准(wafer alignment),以确保离子植入机能够准确地针对晶圆上特定区域进行物质掺杂。完成校准的晶圆将被传输机器人放置于离子植入机的处理器的静电吸盘上。处理器内的扫描机器人自静电吸盘取走待处理晶圆,再将待处理晶圆移动至离子束的照射范围。然而,由于晶圆的运送过程涉及多个机器人的传递作业,传递过程中的任何机械动作偏差皆可能造成晶圆晶格对准的偏差,从而导致离子植入作业的良率降低。
技术实现要素:
4.有鉴于此,申请人提出一种离子植入机。依据一些实施例,一种离子植入机用以处理一工件,该离子植入机包含一负载模组;一处理模组,包含一摄像机以及一晶圆卡盘,该摄像机具有一影像撷取范围,该影像撷取范围涵盖一硅片交换点,该晶圆卡盘用以于该硅片交换点承接该工件;以及一真空传输模组,耦接该处理模组及该负载模组,该真空传输模组包含一对准器以及至少一传输机器人,该传输机器人可用以将工件自负载模组传送至对准器,将该工件自该对准器传送至该晶圆卡盘,或将工件自晶圆卡盘传送回负载模组。
5.依据一些实施例,该处理模组还包含一离子源和离子束流成形模组及一扫描机器人,该离子源和离子束流成形模组用以提供一离子束,该扫描机器人耦接该晶圆卡盘,并用以将该工件调整至一植入平面以接收该离子束,该植入平面垂直于一工件传输平面。
6.依据一些实施例,该离子源和离子束流成形模组产生的离子束的射出口所处平面与位于该植入平面的该工件的中点的距离大于150毫米。
7.依据一些实施例,该植入平面与该离子源和离子束流成形模组产生的离子束的射出口所处平面的夹角大于等于0度且小于等于90度。
8.依据一些实施例,定义该真空传输模组的几何中点指向该处理模组的几何中点的一第一向量,定义该负载模组的几何中点指向该真空传输模组的几何中点的一第二向量,该第一向量与该第二向量的夹角大于等于0度。
9.依据一些实施例,该第一向量与该第二向量的夹角大于等于0度且小于等于120度。
10.依据一些实施例,该第一向量与该第二向量的夹角大于等于0度且小于等于90度。
11.依据一些实施例,该离子植入机还包含一设备前端模组,该设备前端模组连接该负载模组,定义该设备前端模组与该负载模组的接面为一第一接面,定义该真空传输模组与该负载模组的接面为一第二接面,该第一接面与该第二接面的夹角大于等于0度且小于
等于45度。
12.依据一些实施例,该传输机器人包含至少一机械手臂,该机械手臂包含独立运作的一控制电机组,该控制电机组用以控制该机械手臂以下一或多的功能:升降、旋转或伸缩。
13.依据一些实施例,该传输机器人为二个,该对准器与该硅片交换点的连线为该二传输机器人的连线的中垂线。
14.依据一些实施例,负载模组取得该工件,并包含至少一机械手臂,该机械手臂包含独立运作的一控制电机组,该控制电机组用以控制该机械手臂以下一或多的功能:升降、旋转或伸缩。
15.依据一些实施例,该真空传输模组还包含一温度调节模组,该传输机器人用以将该工件传送至该温度调节模组可再将该工件传送至该处理模组,或用以将工件自该处理模组传送至该温度调节模组。
附图说明
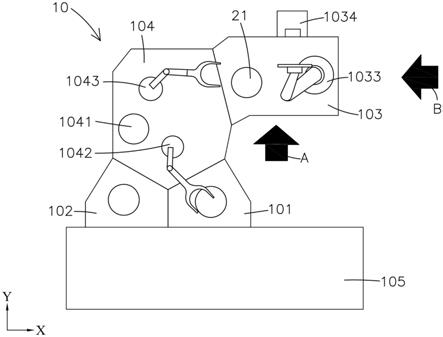
16.图1是依据第一实施例的离子植入机的俯视图;
17.图2a是沿箭头a视角观察图1的离子植入机的处理模组的侧视图;
18.图2b是沿箭头a视角观察图1的离子植入机的处理模组于另一使用状态的侧视图;
19.图2c是沿箭头b视角观察图1的离子植入机的处理模组的侧视图;
20.图3a是依据图1的离子植入机的处理模组于植入平面倾斜时的侧视图;
21.图3b是依据图1的离子植入机的处理模组于植入平面倾斜时的俯视图;
22.图4是依据第一实施例的第一向量与第二向量的示意图;
23.图5是依据第一实施例的第一接面与第二接面的示意图;
24.图6是依据第二实施例的离子植入机的俯视图;
25.图7是依据第一实施例的工件于离子植入机的传送距离的示意图;以及
26.图8是依据第三实施例的离子植入机的俯视图。
27.【符号说明】
28.10、20、30:离子植入机
29.101、102:负载模组
30.103:处理模组
31.1031:摄像机
32.1032:晶圆卡盘
33.1033:扫描机器人
34.1034:离子源和离子束流成形模组
35.104:真空传输模组
36.1041:对准器
37.1042、1043:传输机器人
38.10421:第二机械手臂
39.10422:第一机械手臂
40.1044:温度调节模组
41.105:设备前端模组
42.1:工件
43.2:影像撷取范围
44.21:硅片交换点
45.3:离子束
46.41、42、43:几何中点
47.51:第一向量
48.52:第二向量
49.61:植入平面
50.62:射出平面
51.63:第一接面
52.64:第二接面
53.a、b:箭头
54.d、d1、d2、d3、d4:距离
55.θ1、θ2、θ3:夹角
56.x、y、z:轴向
具体实施方式
57.请参照图1,图1是依据第一实施例的离子植入机的俯视图。图1中的左右方向为空间中的轴向x;上下方向为空间中的轴向y;垂直附图纸面的方向为空间中的轴向z。离子植入机10包含负载模组101、处理模组103以及真空传输模组104。依据一些实施例,离子植入机10包含二个负载模组,如图1的负载模组101及负载模组102。依据一些实施例,离子植入机10包含设备前端模组105(equipment front end module,efem),用以将工件1自晶圆传送盒(front opening unified pod,foup)移动至负载模组101。处理模组103包含摄像机1031以及晶圆卡盘1032。依据一些实施例,处理模组103包含离子源和离子束流成形模组1034以及扫描机器人1033。真空传输模组104耦接处理模组103及负载模组101,真空传输模组104包含对准器1041以及至少一传输机器人1042。依据一些实施例,真空传输模组104包含二个传输机器人,如图1的传输机器人1042及传输机器人1043。
58.负载模组101可为介于大气环境与真空环境之间,用以传送工件1的负载模组101(load lock)。依据一些实施例,负载模组101的一侧耦接于真空传输模组104,并可视情况开启或关闭与真空传输模组104的真空环境的连通状态;负载模组101的另一侧耦接于设备前端模组105,并可视情况开启或关闭与设备前端模组105的大气环境的连通状态。依据一些实施例,负载模组101可包含减压系统。当负载模组101与设备前端模组105连通时,负载模组101耦接于真空传输模组104的一侧为关闭状态。当处于设备前端模组105的大气环境的工件1放置于负载模组101后,负载模组101关闭与设备前端模组105的连通状态并启动减压系统。减压系统将负载模组101内的气压降低至与真空传输模组104内的气压实质均等后,负载模组101开启与真空传输模组104的连通状态。
59.真空传输模组104分别耦接于处理模组103与负载模组101。依据一些实施例,真空传输模组104直接连接于处理模组103。依据一些实施例,真空传输模组104通过连接于其他
与处理模组103具有连接关系的腔室,而间接连接于处理模组103。依据一些实施例,真空传输模组104直接连接于负载模组101。依据一些实施例,真空传输模组104通过连接于其他与负载模组101具有连接关系的腔室,而间接连接于负载模组101。依据一些实施例,真空传输模组104用以将工件1由负载模组101传送至处理室。依据一些实施例,真空传输模组104为保持在真空状态的腔室。真空传输模组104包含对准器1041以及传输机器人1042。依据一些实施例,真空传输模组104包含温度调节模组1044。
60.对准器1041用以对工件1进行校准,确保在工件1上的正确位置进行物质掺杂。对准器1041可以但不限于采用机械对位或光学对位。传输机器人1042用以移动工件1。依据一些实施例,传输机器人为两个。依据一些实施例,传输机器人1042包含至少一机械手臂,所述机械手臂包含独立运作的控制电机组。所述控制电机组用于控制所述机械手臂以下一或多的功能:升降、旋转或伸缩。依据一些实施例,传输机器人1042包含二支机械手臂,各机械手臂包含独立运作的控制电机组。依据一些实施例,机械手臂包含末端效应器(end effector)及手臂主体。末端效应器用以固持工件1,例如但不限于金属板、夹爪或吸盘。末端效应器可以包含陶瓷或隔热塑料,以防止工件1与机械手臂之间的热传导。手臂主体用以移动末端效应器,并提供一个以上的运动自由度,例如在三维空间直线移动或旋转。依据一些实施例,手臂主体可以包含一个以上的关节,各关节间可以相对旋转。依据一些实施例,手臂主体可以伸缩末端效应器。
61.温度调节模组1044用以调节工件1的温度。依据一些实施例,温度调节模组1044具有冷却模组或加热模组。冷却模组可以包含冷却管路及静电吸盘,冷却管路传送致冷剂;致冷剂将工件1温度降低。加热模组可以包含加热器。依据一些实施例,温度调节模组1044具有整合设置的冷却模组及加热模组。依据一些实施例,温度调节模组1044具有个别设置的冷却模组以及加热模组。
62.处理模组103用以对工件1进行离子植入。处理模组103包含晶圆卡盘1032以及摄像机1031。图2a是沿箭头a视角观察图1的离子植入机的处理模组的侧视图,请参照图2a。摄像机1031具有影像撷取范围2,影像撷取范围涵盖硅片交换点21,晶圆卡盘1032用于在硅片交换点21承接工件1。因此,请参考图2b,当晶圆卡盘1032在硅片交换点21承接工件1时,晶圆卡盘1032位于影像撷取范围2中。如此一来,于工件1被传输机器人1043传送至晶圆卡盘1032后及被执行离子植入处理前,摄像机1031能够快速地复检工件1是否有倾斜或缺口(notch)对准跑位的情况,避免传送过程导致的位置偏离。举例而言,摄像机1031拍摄工件1的投影轮廓,以判断投影轮廓是否为正圆或椭圆。若投影轮廓为椭圆,则代表工件1于传输过程中发生倾斜。所述摄像机1031可以是一种光学设备,例如但不限于录影机、照相机、可见光感测器、非可见光感测器。晶圆卡盘1032用以固定待处理的工件1,例如但不限于静电吸盘。依据一些实施例,处理模组103可包含离子源和离子束流成形模组1034、扫描机器人1033以及靶室。离子源和离子束流成形模组1034用以将游离状态的掺杂物质于电场中进行加速并聚焦为离子束3射向工件1。依据一些实施例,扫描机器人1033耦接晶圆卡盘1032,扫描机器人1033通过晶圆卡盘1032固定工件1以于空间中移动工件1以及于离子植入过程中固持工件1。图2c是沿箭头b视角观察图1的离子植入机的处理模组的侧视图,请参照图2c。依据一些实施例,扫描机器人1033将工件1固持于植入平面61,使工件1接收离子源和离子束流成形模组1034发射的离子束3。靶室为保持在真空状态的腔室,包含所述扫描机器人
1033。所述工件1为离子植入机10所欲处理的工作物件。依据一些实施例,工件1为晶圆(wafer)。
63.综上所述,依据一些实施例,离子植入机10以真空传输模组104内的对准器1041对工件1进行较高精度的第一次缺口方向校准,并于离子植入处理前,以处理模组103内的摄像机1031对工件1进行较快速的第二次缺口方向检查及倾斜检查,以保证校准精确度而不致过度增加校准过程所耗费的总时间。
64.依据一些实施例,扫描机器人1033将工件1调整至植入平面61以接收离子束3,所述植入平面61垂直于工件传输平面。依据一些实施例,工件传输平面为工件1在真空传输模组104中被传输机器人传送时所处的平面。请一并参照图1及图2c,图1中的左右方向为空间中的轴向x;上下方向为空间中的轴向y;垂直附图纸面的方向为空间中的轴向z。图2c中的左右方向为空间中的轴向y;上下方向为空间中的轴向z;垂直附图纸面的方向为空间中的轴向x。于此实施例,植入平面61为xz平面,工件传输平面为xy平面。如此一来,位于植入平面61的工件1上任一沿z轴方向的切弦上的所有点相距离子源和离子束流成形模组1034产生的离子束的射出口所处的平面的距离均相等,即距离d。从而针对所述切弦上所有的点进行离子植入所需要的离子束3能量相同,且避免不均等距离情况下离子束3发散(blow
‑
up)程度不均所造成的影响。
65.依据一些实施例,所述植入平面61并非必须平行于离子源和离子束流成形模组1034产生的离子束的射出口所处的平面(即射出平面62,位于xz平面)。图3a是依据图1的离子植入机的处理模组于植入平面倾斜时的侧视图;图3b是依据图1的离子植入机的处理模组于植入平面倾斜时的俯视图,请一并参照图3a及图3b。于此实施例,植入平面61与射出平面62(xz平面)具有一倾斜夹角θ1。依据一些实施例,夹角θ1大于等于0度且小于等于90度。当夹角θ1等于0度时,植入平面61与射出平面62皆为平行于xz平面的平面,即图2c的实施例的情况。当夹角θ1等于90度时,植入平面61位于yz平面,射出平面62位于xz平面,两者为垂直的平面。于此实施例,无论夹角θ1的量值大小,工件1上任一沿z轴方向的切弦上的所有点相距射出平面62的距离亦均为相等。如此一来,离子植入机10得以采用不同入射角的离子束3对工件1进行离子植入。依据一些实施例,射出平面62与位于植入平面61的工件1的中点的距离d大于150毫米。考量现行12吋晶圆直径为300毫米,距离d大于150毫米以因应大尺寸晶圆加工,并提供以倾角进行离子植入的空间。
66.图4是依据第一实施例的第一向量与第二向量的示意图,请参照图4。依据一些实施例,定义真空传输模组104的几何中点42指向处理模组103的几何中点43的第一向量51,定义负载模组101的几何中点41指向真空传输模组104的几何中点42的第二向量52。第一向量51与第二向量52的夹角θ2,即由第一向量51沿逆时钟方向至第二向量52的夹角,所述夹角θ2可以是大于或等于0度。几何中点可以是但不限于三维空间的几何中点或二维投影平面的几何中点。当夹角θ2大于0度时,离子植入机10的总体长度(沿y轴方向)被有效缩短,利于晶圆加工厂的空间配置。依据一些实施例,定义处理模组103与真空传输模组104的接面的法向量为第一向量(指向处理模组103),定义负载模组101与真空传输模组104的接面的法向量为第二向量(指向真空传输模组104),所述第一向量与所述第二向量的夹角大于或等于0度。同样地,当夹角θ2大于0度时,离子植入机10的总体长度(沿y轴方向)被有效缩短,利于晶圆加工厂的空间配置。所述负载模组101的几何中点41可以是单一负载模组101的几
何中点41,亦可以是多个负载模组,如负载模组101与负载模组102,共同的几何中点。依据一些实施例,第一向量51与第二向量52的夹角θ2大于等于0度且小于等于120度。依据一些实施例,第一向量51与第二向量52的夹角θ2可以是大于等于60度且小于等于90度。如此一来,离子植入机10的总体长度(沿y轴方向)被缩短,而处理模组103与负载模组101之间仍保留足够进行设备维护的作业空间。依据一些实施例,所述接面为腔体之间的闸门开口所处的平面。
67.依据一些实施例,设备前端模组105连接负载模组101,定义设备前端模组105与负载模组101的接面为第一接面63,定义真空传输模组104与负载模组101的接面为第二接面64。所述第一接面63与所述第二接面64的夹角θ3大于等于0度且小于等于45度。图5是依据第一实施例的第一接面与第二接面的示意图,请参照图5。举例而言,设备前端模组105与负载模组101间具有第一接面63,负载模组101与真空传输模组104间具有第二接面64;设备前端模组105与负载模组102间亦具有第一接面,负载模组102与真空传输模组104间亦具有第二接面。依据一些实施例,传输机器人1042位于负载模组101与负载模组102之间的中线位置。当夹角θ3等于0度,即第一接面63与第二接面64平行时,传输机器人1042的机械手臂必须伸缩较长的距离以从负载模组101或负载模组102拿取工件1,如此导致机械手臂的折旧年限减短。当夹角θ3大于0度,负载模组101或负载模组102与传输机器人1042的距离降低,从而减少机械手臂为拿取工件1所必须伸缩的距离。依据一些实施例,当相邻负载模组101的第一接面63与第二接面64的夹角θ3,以及相邻负载模组102的第一接面与第二接面的夹角皆等于45度,即两个第二接面垂直,此时传输机器人1042的机械手臂的伸缩方向垂直于第二接面64,因此传输机器人1042只需要在单一轴向伸缩机械手臂即可拿取工件1,而无须以双轴向作动机械手臂。
68.图6是依据第二实施例的离子植入机的俯视图,请参照图6。依据一些实施例,离子植入机20的传输机器人1042包含第一机械手臂10422以及第二机械手臂10421,两支机械手臂各自包含独立运作的控制电机组,所述控制电机组用于控制机械手臂以下一或多的功能:升降、旋转或伸缩,以因应于不同高度的元件(如负载模组101、对准器1041或耦接于扫描机器人1033的晶圆卡盘1032等元件)取放工件1而独立进行以下一或多的功能:升降、旋转或伸缩的调整。依据一些实施例,第一机械手臂10422自负载模组101拿取第一工件1并放置于对准器1041,第二机械手臂10421至负载模组101前待命;其后,第一机械手臂10422自对准器1041拿取完成校准的第一工件1并于硅片交换点21将第一工件1传递给耦接于扫描机器人1033的晶圆卡盘1032,第二机械手臂10421自负载模组101拿取第二工件1并放置于对准器1041;其后,第一机械手臂10422于硅片交换点21自耦接于扫描机器人1033的晶圆卡盘1032拿取完成离子植入的第一工件1并放置回负载模组101,第二机械手臂10421自对准器1041拿取完成校准的第二工件1并于硅片交换点21将第二工件1传递给耦接于扫描机器人1033的晶圆卡盘1032;其后,第一机械手臂10422自负载模组101拿取第三工件1并放置于对准器1041,第二机械手臂10421于硅片交换点21自耦接于扫描机器人1033的晶圆卡盘1032拿取完成离子植入的第二工件1并放置回负载模组101。依据一些实施例,第一机械手臂10422自负载模组101拿取第一工件1并放置于对准器1041;其后,第二机械手臂10421自对准器1041拿取完成校准的第一工件1并于硅片交换点21将第一工件1传递给耦接于扫描机器人1033的晶圆卡盘1032;其后,第一机械手臂10422于硅片交换点21自耦接于扫描机器
人1033的晶圆卡盘1032拿取完成离子植入的第一工件1并放置于负载模组101。通过第一机械手臂10422与第二机械手臂10421的独立运作,提供多种工件1传送路径的选择。
69.图7是依据第一实施例的工件于离子植入机的传送距离的示意图,请参照图7。依据一些实施例,离子植入机10包含传输机器人1042以及传输机器人1043,其中,对准器1041与硅片交换点21的连线为传输机器人1042与传输机器人1043的连线的中垂线。依据一些实施例,所述连线为元件的几何中点的连线。因此,传输机器人1042与对准器1041的距离d1与传输机器人1043与对准器1041的距离d3相等;传输机器人1042与硅片交换点21的距离d2与传输机器人1043与硅片交换点21的距离d4相等。如此一来,传输机器人1042与传输机器人1043于每次运作周期的作动总距离接近,使两者折旧年限接近而易于设备管理。依据一些实施例(图未示),离子植入机10包含传输机器人1042以及传输机器人1043,其中,靠近负载模组的传输机器人1042可以包含两个独立运作的一第一机械手臂与一第二机械手臂,该第一机械手臂可以用来将负载模组101的工件1传送到对准器1041进行校正,传输机器人1043的机械手臂则将校正完的工件1传送到硅片交换点21以将第一工件1传递给耦接于扫描机器人1033的晶圆卡盘1032;其后,传输机器人1042的第二机械手臂于硅片交换点21自耦接于扫描机器人1033的晶圆卡盘1032拿取完成离子植入的第一工件1并放置于负载模组101。
70.图8是依据第三实施例的离子植入机的俯视图,请参照图8。依据一些实施例,离子植入机30的真空传输模组104包含对准器1041以及温度调节模组1044。传输机器人1042将工件1置于对准器1041进行校准后,再将工件1置于温度调节模组1044进行温度调节,之后再将工件1传送至硅片交换点21以交递给晶圆卡盘1032。依据一些实施例,离子植入机30采用低温离子植入。工件1于传送至硅片交换点21以交递给晶圆卡盘1032前,先放置于温度调节模组1044进行降温;于完成离子植入后,再将工件1传送到温度调节模组1044以将其升温至室温。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1