基板处理装置、半导体装置的制造方法及存储介质与流程
1.本发明涉及一种基板处理装置、半导体装置的制造方法及存储介质。
背景技术:
2.作为半导体装置的制造工序中的一个工序,有时进行在基板上形成膜的处理(例如参照专利文献1)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2018-160507号公报
技术实现要素:
6.发明所要解决的课题
7.在形成膜的过程中,有时基板会发生歪斜。歪斜的基板不稳定,在对该基板进行输送时有可能导致该基板落下。
8.本发明提供一种防止歪斜的基板落下并稳定地进行输送的技术。
9.用于解决课题的方案
10.根据一个方案,提供以下技术,具有:
11.处理室,其对基板进行处理;
12.气体供给部,其向上述处理室内供给气体;
13.基板载置部,其配置在上述处理室内且具有载置基板的基板载置面;以及
14.臂,其支撑基板的下表面并向上述基板载置面输送该基板,
15.上述臂构成为,支撑基板的支撑部具有倾斜。
16.发明的效果
17.根据本发明,能够提供一种防止歪斜的基板落下并稳定地进行输送的技术。
附图说明
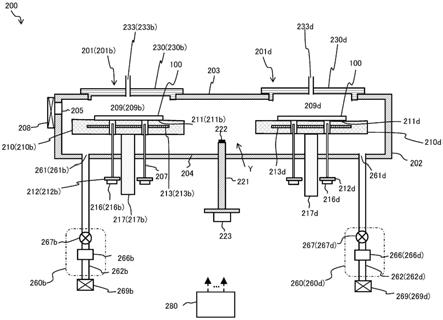
18.图1是本发明一方式的多片式的基板处理装置要部的概要剖视图。
19.图2是本发明一方式的基板处理装置要部的概要俯视图。
20.图3是本发明一方式的基板处理装置要部的概要俯视图。
21.图4是本发明一方式的基板处理装置要部的概要剖视图。
22.图5是对本发明一方式的基板处理装置的气体供给部进行说明的图。
23.图6是对本发明一方式的基板处理装置的气体供给部进行说明的图。
24.图7是本发明一方式的基板处理装置的控制器的概要结构图,且以框图示出控制器的控制系统。
25.图8是对本发明一方式的晶圆处理状态进行说明的说明图。
26.图9是本发明一方式的基板处理工序的概要流程图。
27.图10是表示本发明一方式的基板处理装置的旋转臂的动作的图。图10的(a)是表示旋转臂载置晶圆之前的状态的图。图10的(b)是表示旋转臂开始载置晶圆的状态的图。图10的(c)是表示旋转臂载置晶圆之后的状态的图。
28.图11是本发明一方式的基板处理装置的旋转臂的侧视图。
29.图12是表示本发明一方式的基板处理装置的旋转臂与晶圆的关系的图。图12的(a)是表示旋转臂载置有晶圆的状态的图。图12的(b)是表示旋转臂进行旋转并输送晶圆的状态的图。
30.图13是表示本发明一方式的基板处理装置的旋转臂与晶圆的关系的图。图13的(a)是表示旋转臂载置有晶圆的状态的图。图13的(b)是表示旋转臂进行旋转并输送晶圆的状态的图。
31.图14是表示本发明一方式的基板处理装置的旋转臂载置有晶圆的状态的图。
32.图中:
33.100—晶圆(基板);200—基板处理装置;201—处理室;210—基台;211、211a、211b、211c、211d—基板载置面;222—旋转臂;222a—支撑部;222b—弯曲部;300—第一气体供给部;340—第二气体供给部。
具体实施方式
34.<本发明的一个方式>
35.以下对本发明的一个方式进行说明。
36.(1)基板处理装置的结构
37.首先,参照图1~图7对本方式的基板处理装置的结构进行说明。本方式的基板处理装置是在半导体装置的制造工序中使用的装置,且构成为每次对多片作为处理对象的基板进行处理的装置。就作为处理对象的基板而言,例如可以举出构建有半导体装置(半导体器件)的半导体晶圆基板(以下简称为“晶圆”)。
38.(处理容器)
39.如图1所示,基板处理装置200具备处理容器202。处理容器202例如构成为扁平的密闭容器且横剖面呈方形。处理容器202由铝(al)、不锈钢(sus)等金属材料构成。在处理容器202内形成有对硅晶圆等晶圆100进行处理的处理室201。处理室201由后述的气体分散结构230、作为基板载置部的基台210等构成。
40.在处理容器202的侧面设置有与闸阀208相邻的基板搬入出口205,晶圆100经由基板搬入出口205在处理容器202与未图示的输送室之间移动。
41.在处理室201配置有对晶圆100进行加热的基台210。基台210以后述的旋转轴221为中心呈围绕状配置有多个。参照图2对基台210的配置进行说明。图2是从上方观察后述的作为臂的旋转臂222的附近的图。机械臂240配置于处理容器202的外部,具有将晶圆100向处理容器202的内外移载的功能。沿着b-b’线的纵剖视图相当于图1。
42.基台210例如配置有四个。具体而言,从与基板搬入出口205对置的位置起顺时针配置有基台210a、210b、210c、210d。向处理容器202搬入的晶圆100按照基台210a~210d的顺序进行移动。
43.基台210a~210d各自具有:载置晶圆100的基板载置面211(211a、211b、211c、
211d)、对基台210进行支撑的主轴217(217a、217b、217c、217b)、作为加热源的加热器213(213a、213b、213c、213d)。分别在基台210上与升降销207对应的位置设有供升降销207贯通的贯通孔。主轴217贯通处理容器202的底部204。主轴217与处理容器202绝缘。
44.以贯通底部204的方式设置有升降销207。升降销207配置于能够通过在基台210上设置的贯通孔的位置。升降销207的前端在基板搬入/搬出时等情况下对晶圆100进行支撑。
45.在升降销207的下端设置有升降销支撑部212(212a、212b、212c、212d)。在各升降销支撑部212a~212d设置有升降销升降部216(216a、216b、216c、216d)。升降销升降部216使升降销207进行升降。升降销支撑部212a~212d和升降销升降部216a~216d分别与基台210a~210d对应地设置。将升降销207、升降销支撑部212、升降销升降部216统称为晶圆升降部。
46.在处理容器202的盖部203上与各基板载置面211a~211d对置的位置,分别设置有作为气体分散机构的气体分散结构230(230a、230b、230c、230d)。从上方来看,如图3所示那样,配置有四个气体分散结构230。气体分散结构230被盖部203支撑。
47.如图3所示,在各气体分散结构230设置有气体导入孔。具体而言,在气体分散结构230a设置气体导入孔231a,在气体分散结构230b设置气体导入孔233b,在气体分散结构230c设置气体导入孔231c,在气体分散结构230d设置气体导入孔233d。气体导入孔231a、231c与后述的第一气体供给管311连通。气体导入孔233b,233d与后述的共用气体供给管341连通。此外,沿着a-a’线的纵剖面图相当于图1。
48.将气体分散结构230a~230d与基板载置面211a~211d之间的空间称为处理空间209(209a、209b、209c、209d)。在本方式中,将气体分散结构230a与基板载置面211a之间的空间称为处理空间209a。将气体分散结构230b与基板载置面211b之间的空间称为处理空间209b。将气体分散结构230c与基板载置面211c之间的空间称为处理空间209c。将气体分散结构230d与基板载置面211d之间的空间称为处理空间209d。
49.另外,将构成处理空间209的结构称为处理室201。在本方式中,将构成处理空间209a且至少具有气体分散结构230a和基台210a的结构称为处理室201a。将构成处理空间209b且至少具有气体分散结构230b和基台210b的结构称为处理室201b。将构成处理空间209c且至具有少气体分散结构230c和基台210c的结构称为处理室201c。将构成处理空间209d且至具有少气体分散结构230d和基台210d的结构称为处理室201d。
50.在此,记载了处理室201a至少具有气体分散结构230a和基台210a的情况,但只要是构成对晶圆100进行处理的处理空间209的结构,则不限于具有气体分散结构230等的结构。对于其它的处理室201b~201d也是同样的。
51.如图2所示,基台210a~210d以旋转轴221为中心呈围绕状配置。在旋转轴221上安装有旋转臂222,该旋转臂222对载置于基板载置面(例如基板载置面211a)的晶圆100的下表面进行支撑,并将该晶圆100向相邻的基板载置面(例如基板载置面211b)输送。在本方式中,在旋转轴221安装有四个旋转臂222。
52.旋转轴221构成为贯通处理容器202的底部204。在处理容器202的外侧且与旋转臂222相反的一侧设置有旋转臂升降旋转部(以下有时简称为“臂升降部”)223。臂升降旋转部223通过使旋转轴221进行升降、旋转,从而使旋转臂222进行升降、旋转。旋转方向例如是图2的箭头225的方向(顺时针方向)。
53.此外,虽然在本方式中,将具有使旋转臂222进行升降的功能、使旋转臂222进行旋转的功能的结构称为臂升降旋转部,但是也可以采用独立地具有其中之一的功能的结构。此时,将其称为臂旋转部、臂升降部。另外,在具有两种功能或者其中之一的功能的结构的情况下也将该结构称为臂控制部。
54.对于旋转臂222的具体的结构和动作将在后面进行说明。
55.(排气系统)
56.下面说明对处理容器202的环境气体进行排放的排气系统260。排气系统260以与各处理空间209(209a~209d)对应的方式进行设置(参照图1)。例如,处理空间209a与排气系统260a对应,处理空间209b与排气系统260b对应,处理空间209c与排气系统260c对应,处理空间209d与排气系统260d对应。
57.排气系统260具有与设置于处理容器202的排气孔261(261a、261b、261c、261d)连通的排气管262(262a、262b、262c、262d),此外还具有设置于排气管262的apc(auto pressure controller:自动压力控制器)266(266a、266b、266c、266d)。apc266具有能够进行开度调整的阀芯(未图示),并根据来自控制器280的指示而对排气管262的流导进行调整。另外,在排气管262的apc266的上游侧设置阀267(267a、267b、267c、267d)。将排气管262、阀267、apc266统称为排气系统260。
58.在排气管262的下游设置有dp(dry pump:干式泵)269(269a、269b、269c、269d)。dp269经由排气管262对处理室201的环境气体进行排放。在本实施方式中,将dp269对应于排气系统260进行设置,但是不限于此,也可以使各排气系统共用dp269。
59.(第一气体供给部)
60.参照图5对与气体导入孔231a、231c连通的第一气体供给部300进行说明。
61.以气体导入孔231a、231c与共用气体供给管301连通的方式,将气体分散结构230a、230c经由阀302a,302c、流量控制器(流量控制部)即质量流量控制器(mfc)303a、303c与共用气体供给管301连接。使用阀302a、302c、mfc303a、303c来调整对各处理室201a、201c的气体供给量。共用气体供给管301与第一气体供给管311、第二气体供给管321连接。
62.在第一气体供给管311上从上游方向起,依次设置有第一气体源312、mfc313、和开闭阀即阀314。
63.第一气体源312是含有第一元素的第一气体(也称为“含有第一元素的气体”)源。含有第一元素的气体是原料气体即处理气体之一。在此,第一元素是硅(si)。即,含有第一元素的气体是含si气体。具体而言,作为含si气体,可以使用二氯硅烷(sih2cl2,也称为dcs)、六氯二硅烷(si2cl6,也称为hcds)气体。
64.主要地,由第一气体供给管311、mfc313、阀314构成了第一气体供给系统310(也称为含si气体供给系统)。
65.在第二气体供给管321从上游方向起,依次设置有第二气体源322、mfc323、和阀324。
66.第二气体源322是含有第二元素的第二气体(以下也称为“含有第二元素的气体”)源。含有第二元素的气体是处理气体之一。此外,也可以认为含有第二元素的气体是反应气体。
67.这里,就含有第二元素的气体而言,含有与第一元素不同的第二元素。第二元素例
如是氧(o)。在本方式中,含有第二元素的气体例如是含o气体。具体而言,作为含o气体,可以使用臭氧(o3)气体。
68.主要地,由第二气体供给管321、mfc323、阀324构成了第二气体供给系统320(也称为反应气体供给系统)。
69.将第一气体供给系统、第二气体供给系统的其中之一或者其组合称为第一气体供给部300。
70.(第二气体供给部)
71.参照图6对与气体导入孔233b、233d连通的第二气体供给部340进行说明。
72.以气体导入孔233b、233d与共用气体供给管341连通的方式,将气体分散结构230b、230d经由阀342b,342d、mfc343b、343d与共用气体供给管341连接。使用阀342b、342d、mfc343b、343d来调整对各处理室201b、201d的气体供给量。共用气体供给管341与第三气体供给管351、第四气体供给管361连接。
73.在第三气体供给管351从上游方向起,依次设置有第三气体源352、mfc353、和阀354。
74.第三气体源352是含有第一元素的气体源。与第一气体源312同样地,可以使用si类气体。第三气体源352可以与第一气体源312进行共用。
75.主要地,由第三气体供给管351、mfc353、阀354构成了第三气体供给系统350(也称为含si气体供给系统)。
76.在第四气体供给管361从上游方向起,依次设置有第四气体源362、mfc363、和阀364。
77.第四气体源362是含有第三元素的第三气体(以下也称为“含有第三元素的气体”)源。含有第三元素的气体是处理气体之一。也可以认为含有第三元素的气体是反应气体。
78.这里,就含有第三元素的气体而言,含有与第二元素不同的第三元素。第三元素例如是氮(n)。在本方式中,含有第二元素的气体例如是含n气体。具体而言,作为含n气体,可以采用氨气(nh3)。
79.主要地,由第四气体供给管361、mfc363、阀364构成了第四气体供给系统360(也称为反应气体供给系统)。
80.此外,将第三气体供给系统、第四气体供给系统的其中之一或者其组合称为第二气体供给部340。
81.另外,也可以将第一气体供给部300和第二气体供给部340一并简称为气体供给部。
82.(控制器)
83.基板处理装置200具有对基板处理装置200各部分的动作进行控制的控制器280。控制器280如图7所述那样,至少具有运算部(cpu)280a、临时存储部(ram)280b、存储部280c、i/o端口280d。控制器280经由i/o端口280d与基板处理装置200的各结构连接,并按照上位装置270、使用者的指示,从存储部280c调用程序或配方,并按照其内容来控制各结构的动作。
84.收发控制例如通过cpu280a内的收发指示部280e来进行。此外,控制器280可以由专用的计算机构成,也可以由通用的计算机构成。例如,可以准备存储有上述程序的外部存
储装置(例如,磁带、软盘或硬盘等磁盘、cd或dvd等光盘、mo等光磁盘、usb存储器或存储卡等半导体存储器)282,并使用外部存储装置282向通用的计算机安装程序,从而构成本方式的控制器280。
85.另外,用于向计算机提供程序的手段不限于经由外部存储装置282提供的情况。例如,可以使用互联网或专用线路等通信手段,也可以是从上位装置270经由接收部283接收信息而不经由外部存储装置282提供程序。另外,也可以使用键盘或触控面板等输入输出装置281对控制器280进行指示。
86.此外,存储部280c或外部存储装置282构成为计算机可读取的存储介质。以下也将它们简单地统称为存储介质。此外,在本说明书中,“存储介质”这一用语的含义包括:仅指存储部280c一方、仅指外部存储装置282一方、或者是指这两方。
87.(2)基板处理工序
88.接下来说明作为半导体制造工序中的一个工序而使用上述结构的基板处理装置200对晶圆100进行处理的基板处理工序。在此,作为基板处理工程,举出了如图8所示那样在晶圆100上交替地层叠绝缘膜102和牺牲膜112的例子。图9是用于在晶圆100上层叠绝缘膜102和牺牲膜112的流程。在以下的说明中,通过控制器280来控制各部分的动作。
89.(第一绝缘膜形成工序:s02)
90.在预定的处理空间209中,将晶圆100维持于预定的温度,并且将含si气体和含o气体向晶圆100上供给。这样,在晶圆100上形成作为绝缘膜102(1)的sio膜。
91.(第一牺牲膜形成工序:s04)
92.在预定的处理空间209中,将晶圆100维持于预定的温度,并且将含si气体和含n气体向晶圆100上供给。这样,在晶圆100上形成作为牺牲膜112
93.(1)的sin膜。
94.(第二绝缘膜形成工序:s06)
95.在预定的处理空间209中,将晶圆100维持于预定的温度,并且将含si气体和含o气体向晶圆100上供给。这样,在晶圆100上形成作为绝缘膜102
96.(2)的sio膜。
97.(第二牺牲膜形成工序:s08)
98.在预定的处理空间209中,将晶圆100维持于预定的温度,并且将含si气体和含n气体向晶圆100上供给。这样,在晶圆100上形成作为牺牲膜112
99.(2)的sin膜。
100.(判定工序:s10)
101.判断从第一绝缘膜形成工序s02到第二牺牲膜形成工序s08的组合是否执行了预定次数。即,判断是否形成了预定层的绝缘膜102和牺牲膜112。例如,在绝缘膜102与牺牲膜112的合计总数的所需数为16层的情况下,判断上述组合是否重复了四次。
102.当判断为执行了预定次数时,则结束基板处理装置200的处理,当判断为没有执行预定次数时,则转入第一绝缘膜形成工序(s02)。
103.(3)关于旋转臂
104.如上所述,旋转臂222对载置于基板载置面(例如基板载置面211a)的晶圆100进行支撑,并将该晶圆100向相邻的基板载置面(例如基板载置面211b)输送。
105.在本方式中,在旋转臂222输送的晶圆100上层叠sio膜和sin膜。通常,已知sio膜的压缩应力较高,sin膜的拉伸应力较高。即,sio膜和sin膜在膜应力方面具有相反的特性。这些应力的性质在对膜加热时较为显著。
106.在上述的基板处理工序中,重复进行由sio膜构成的绝缘膜102的形成和由sin膜构成的牺牲膜112的形成,但是以在一部分的膜上绝缘膜102和牺牲膜112同时存在的状态对晶圆100进行加热处理。例如在形成牺牲膜112(8)时(参照图9),将晶圆100加热至形成sin膜的温度。此时,在比牺牲膜112(8)靠下方设置的绝缘膜102(1)~102(8)的压缩应力较高,牺牲膜112(1)~112(7)的拉伸应力较高。因此,在绝缘膜102与牺牲膜112之间产生应力差。其结果是,有时会导致晶圆100发生歪斜。
107.例如在对歪斜的晶圆100进行输送时,就现有的由水平姿态的棒部件形成的旋转臂而言,有可能导致晶圆100落下。
108.本案发明人发现:晶圆100的歪斜会对应于基板处理工序中的各种条件而随机地发生,因此无法通过现有的旋转臂来限制支撑部与晶圆100的接触的方向。
109.基于该发现,本案发明人基于通过对支撑部与晶圆100的接触的方向进行限制而能够防止晶圆100落下的思路,完成了不论是否歪斜都能够稳定地输送晶圆100的旋转臂222。以下对旋转臂222的具体的结构和动作进行说明。
110.如图2所示,旋转臂222形成为,在俯视视角下,直线状的棒部件具有多个角部且连续。且构成为能够利用该多个角部附近来支撑晶圆100。
111.如图4所示,旋转臂222具有:对晶圆100进行支撑的支撑部222a、以及弯曲部222b。如图10的(a)~图10的(c)所示,支撑部222a构成为,在侧视视角下,从旋转轴221附近朝向下方具有倾斜。在本方式中,支撑部222a的一部分倾斜,且构成为该倾斜的斜率整齐一致。构成为在旋转臂222输送晶圆100时,以支撑部222a的倾斜的上端侧位于晶圆100的端缘附近的状态来支撑晶圆100(参照图10的(a)~图10的(c))。另外,弯曲部222b在支撑部222a的下端部分朝向上方弯曲地设置。
112.如图1和图2所示,当晶圆100载置于基板载置面211上时,四个旋转臂222在相邻的处理空间209与处理空间209之间,分别退避于底部204附近的四个退避空间y。
113.在将基板载置面211上载置的晶圆100向相邻的基板载置面211输送时,如图4所示,升降销207上升,从而将各基板载置面211a~211d所载置的晶圆100分别载置于升降销207上。
114.四个旋转臂222分别从退避空间y上升并顺时针旋转45
°
,从而配置于晶圆100的下方。此时,支撑部222a以支撑部222a的倾斜的上端侧位于晶圆100的端缘附近的状态对晶圆100进行支撑。之后,升降销207下降,从而将晶圆100移载于旋转臂222的支撑部222a上。进而,旋转臂222以支撑有晶圆100的状态例如顺时针旋转90
°
,从而将晶圆100向相邻的基板载置面211的上方输送。之后,升降销207上升,从而将旋转臂222所支撑的晶圆100分别载置于升降销207上。四个旋转臂222分别顺时针旋转45
°
之后向退避空间y下降。之后,升降销207下降,从而将升降销207上载置的晶圆100载置于各基板载置面211a~211d(参照图2)。
115.旋转臂222构成为,支撑部222a具有倾斜。因此,即使是歪斜的晶圆100,当旋转臂222对其进行支撑时,也首先是支撑部222a的倾斜的上端侧对晶圆100的端缘附近进行支撑(参照图10的(a)、图10的(b))。之后,能够以倾斜的上端侧和晶圆100的端缘附近为接触开
始点,并以维持接触开始点的接触的状态,朝向倾斜的下侧而增加支撑部222a与晶圆100的下表面的接触点(参照图10的(c))。这样,旋转臂222能够对支撑部222a与晶圆100的接触的方向进行限制,因此能够抑制对晶圆100进行支撑时的晶圆100的松动,并抑制晶圆100的落下。
116.另外,如上所述,旋转臂222构成为,在支撑部222a的下端部分具有朝向上方弯曲的弯曲部222b。如图11所示,弯曲部222b具有以从支撑部222a的下端部分向上方升高的方式弯曲的弯曲部分w。
117.该弯曲部分w阻挡向弯曲部222b移动的晶圆100的移动,从而能够限制晶圆100向弯曲部222b的移动。具体而言,当旋转臂222输送晶圆100时,即使由于离心力作用于晶圆100而具有使晶圆100从支撑部222a掉落的倾向,也能够利用弯曲部分w限制晶圆100向弯曲部222b的移动。由此,能够更加可靠地防止晶圆100的落下。
118.此外,如图12所示,弯曲部222b具有不与晶圆100的外周侧壁部c接触的曲率半径。这里,晶圆100的外周侧壁部c是指晶圆100的上表面和下表面以外的外周部分。在半导体装置的制造工序的过程中,对晶圆100的外周侧壁部进行倒角,但是由于加工精度的偏差,倒角后的外周侧壁部的形状的固有差较大,如果是形成多边形状、直线状等的情况,则也有如图12所示那样形成r形状的情况。
119.作为弯曲部222b具有不与晶圆100的外周侧壁部c接触的曲率半径的一例,对弯曲部222b的弯曲部分w的曲率半径比晶圆100的下表面附近的外周侧壁部c的曲率半径大的情况进行了说明(参照图12的(a))。
120.如上所述,在输送晶圆100时,能够利用弯曲部分w限制晶圆100向弯曲部222b的移动。此外,弯曲部分w的弯曲与晶圆100的下表面附近的外周侧壁部c的弯曲相比较为平缓,因此能够避免外周侧壁部c与弯曲部222b的结构面接触(参照图12的(b))。因此,能够防止在晶圆100的外周侧壁部c附着的剩余膜的剥离,因此能够防止在处理室201内产生颗粒。
121.并且构成为,当旋转臂222支撑晶圆100时,晶圆100的外周侧壁部c的最向弯曲部222b侧突出的部分e的位置与弯曲部222b的前端部d的位置相比位于上方(参照图13的(a))。由此,在输送晶圆100时,即使晶圆100向弯曲部222b移动,也能够避免弯曲部222b的前端部d与外周侧壁部c的突出部分e接触(参照图13的(b))。
122.就外周侧壁部c而言,最多附着剩余膜的部位是突出部分e周边。另外,就弯曲部222b而言,最大程度剥离剩余膜的部位是前端部d。因此,即使晶圆100向弯曲部222b移动,也能够避免前端部d与突出部分e的接触,从而将剩余膜的剥离抑制为最小限度。
123.并且构成为,旋转臂222的弯曲部222b的前端f的位置、与旋转臂222的另一端的位置g的差成为预定的范围的差(参照图14)。预定的范围的差是指:支撑部222a具有即使在发生了在晶圆100上可设想的最大的歪斜的情况下,也能够以支撑部222a的倾斜的上端侧位于晶圆100的端缘附近的状态对晶圆100进行支撑的最小的倾斜时的、前端f的位置与另一端g的位置的差。也就是说,支撑部222a具有即使在发生了在晶圆100上可设想的最大的歪斜的情况下,也能够在支撑晶圆100时抑制晶圆100的松动的最小的倾斜时的、前端f的位置与另一端g的位置的差。
124.如上所述,为了抑制在输送晶圆100时发生晶圆100的松动,旋转臂222构成为,支撑部222a具有倾斜。支撑部222a具有倾斜,因此与现有的水平姿态的旋转臂相比,会导致在
从晶圆100的非载置状态起到载置状态为止的旋转臂222的上下方向的移动空间较大。
125.如果旋转臂222的上下方向的移动空间较大,则会导致处理室201内的旋转臂222的移动空间的高度h(参照图4)也较大。如果旋转臂222的移动空间的高度h较大,则会导致各处理空间209a~209d的处理气体等发生混合,在上述基板处理工序中产生不良情况。
126.在本方式中,为了避免处理气体等的混合,使得弯曲部222b的前端f的位置、与旋转臂222的另一端g的位置的差在上述范围内。即,根据本方式的旋转臂222,能够将处理室201内的旋转臂222的移动空间的高度h抑制为最小限度,因此能够提高各处理空间209a~209d内的压力,从而使各气体分离并适当地进行处理。
127.(4)本方式的效果
128.根据本方式,获得以下所示的一个或者多个效果。
129.(a)本方式的旋转臂222构成为,支撑部222a具有倾斜。由此,在输送晶圆100时,当旋转臂222支撑歪斜的晶圆100时,能够限制支撑部222a与晶圆100的接触的方向,因此能够抑制在对晶圆100进行支撑时晶圆100发生松动。从而旋转臂222能够防止晶圆100的落下。
130.(b)在本方式中构成为,当旋转臂222对晶圆100进行支撑时,以倾斜的上端侧位于晶圆100的端缘附近的状态对晶圆100进行支撑。由此,能够以倾斜的上端侧与晶圆100的端缘附近为接触开始点,并以维持接触开始点的接触的状态,朝向倾斜的下侧增加支撑部222a与晶圆100的下表面的接触点。这样,旋转臂222能够限制支撑部222a与晶圆100接触的方向,因此能够抑制在支撑晶圆100时发生晶圆100的松动。从而旋转臂222能够可靠地抑制晶圆100的落下。
131.(c)本方式的旋转臂222构成为,在支撑部222a的下端部分具有朝向上方弯曲的弯曲部222b。弯曲部222b具有以从支撑部222a的下端部分朝向上方升高的方式弯曲的弯曲部分w(参照图11)。该弯曲部分w阻挡晶圆100向弯曲部222b的移动,从而能够限制晶圆100向弯曲部222b的移动。由此,旋转臂222能够可靠地抑制晶圆100的落下。
132.(d)在本方式中构成为,旋转臂222的弯曲部222b具有不与晶圆100的外周侧壁部c接触的曲率半径。由此,在输送晶圆100时,能够避免外周侧壁部c与弯曲部222b的结构面接触。因此,能够避免在晶圆100的外周侧壁部c上附着的剩余膜的剥离,因此能够防止在处理室201内产生颗粒。
133.(e)在本方式中构成为,当旋转臂222支撑晶圆100时,外周侧壁部c的最向上述弯曲部侧突出的部分e的位置与弯曲部222b的前端部d的位置相比位于上方。由此,在利用旋转臂222输送晶圆100时,能够避免弯曲部222b的前端部d与外周侧壁部c的突出部分e接触。即使晶圆100向弯曲部222b移动,也能够避免前端部d与突出部分e的接触,从而将剩余膜的剥离抑制为最小限度。
134.(f)在本方式中构成为,旋转臂222的弯曲部222b的前端f的位置、与旋转臂222的另一端的位置g的差成为预定的范围的差。由此,能够将处理室201内的旋转臂222的移动空间的高度h抑制为最小限度,因此能够提高各处理空间209a~209d内的压力,从而使各气体分离并适当地进行处理(参照图14)。
135.<本发明的其它方式>
136.以上对本发明的方式具体地进行了说明,本发明不限于上述的方式,能够在不脱离其要旨的范围内进行多种变更。
137.(a)在上述方式中,举出了支撑部222a从旋转轴221侧朝向下方具有倾斜的例子,但是本发明不限于此。例如也可以构成为,支撑部222a从旋转轴221侧朝向上方具有倾斜。此时,旋转臂222能够抑制在对晶圆100进行支撑时发生晶圆100的松动,防止晶圆100的落下。
138.(b)另外,在上述方式中,举出了支撑部222a构成为其一部分倾斜且该倾斜的斜率整齐一致的例子,但是本发明不限于此。例如,支撑部222a也可以构成为整体倾斜,也可以构成为倾斜的斜率发生变化。在支撑部222a整体倾斜的情况下,支撑部222a的上端和倾斜的上端一致。在这些情况下,旋转臂222也能够抑制在对晶圆100进行支撑时发生晶圆100的松动,防止晶圆100的落下。
139.(c)另外,在上述方式中,举出了支撑部222a形成为在俯视视角下,直线状的棒部件具有多个角部且连续的例子,但是本发明不限于此。例如,支撑部222a只要具有对晶圆100进行支撑的区域,则也可以形成为在俯视视角下呈曲线状。此时,旋转臂222也能够抑制在对晶圆100进行支撑时发生晶圆100的松动,抑制晶圆100的落下。
140.(d)另外,在上述方式中,以旋转臂222为例进行了说明,但是本发明不限于此。例如,机械臂240也可以具有上述的结构。此时,机械臂240能够抑制在对晶圆100进行支撑时发生晶圆100的松动,防止晶圆100的落下。
141.(e)此外,在上述方式中构成为,在输送晶圆100时,避免在外周侧壁部c附着的剩余膜的剥离,以弯曲部222b具有不与外周侧壁部c接触的曲率半径的情况、和外周侧壁部c的突出部分e的位置与弯曲部222b的前端部d的位置相比位于上方的情况为例进行了说明。这不限于仅在具备两种情况时才具有效果。满足其中一种情况即可获得效果。
142.(f)另外,在上述方式中,作为晶圆100发生歪斜的原因,以在层叠膜的绝缘膜102(sio膜)与牺牲膜112(sin膜)之间产生的应力差为例进行了说明,但是本发明不限于此。例如,对晶圆100不均匀地进行加热的情况也可能成为晶圆100发生歪斜的原因。即,不论是怎样的发生原因,对于发生了歪斜的晶圆100,都能够应用通过上述方式说明的旋转臂222,从而抑制在对晶圆100进行支撑时发生的晶圆100的松动,防止晶圆100的落下。
143.(g)另外,在上述方式中,以在晶圆100上形成sio膜与sin膜的层叠膜的情况为例进行了说明,但是本发明不限于此。例如,也可以在晶圆100上分别单独地形成sio膜、sin膜。即,不论晶圆100上形成的膜是否为层叠膜,对于发生了歪斜的晶圆100,都能够应用通过上述方式说明的旋转臂222,从而抑制在对晶圆100进行支撑时发生晶圆100的松动,防止晶圆100的落下。
144.另外,在上述方式中,以在晶圆100上形成sio膜、sin膜为例进行了说明,但是本发明不限于此。作为所形成的膜,例如也可以是含有ti等金属成分的膜。另外,虽然作为与si或金属成分等耦合的例子对o或n等进行了说明,但是本发明不限于此。例如也可以是碳或其它金属等。
145.<本发明的优选方案>
146.以下对本发明的优选方案进行附记。
147.[附记1]
[0148]
根据本发明的一个方案,提供一种基板处理装置,其具有:
[0149]
处理室,其对基板进行处理;
[0150]
气体供给部,其向上述处理室内供给气体;
[0151]
基板载置部,其配置在上述处理室内且具有载置基板的基板载置面;以及
[0152]
臂,其支撑基板的下表面并向上述基板载置面输送该基板,
[0153]
上述臂构成为,支撑基板的支撑部具有倾斜。
[0154]
[附记2]
[0155]
优选,提供附记1所述的基板处理装置,其中,
[0156]
上述支撑部构成为,以上述倾斜的上端侧位于基板的端缘附近的状态支撑该基板。
[0157]
[附记3]
[0158]
优选,提供附记1或者2所述的基板处理装置,其中,
[0159]
上述臂安装于旋转轴,
[0160]
以上述旋转轴为中心呈围绕状配置有多个上述基板载置部,
[0161]
上述旋转轴进行旋转,从而上述臂在多个上述基板载置面之间输送基板。
[0162]
[附记4]
[0163]
优选,提供附记1~3中任一方案所述的基板处理装置,其中,
[0164]
上述臂构成为,在上述支撑部的下端部分还具有朝向上方弯曲的弯曲部。
[0165]
[附记5]
[0166]
优选,提供附记4所述的基板处理装置,其中,
[0167]
上述弯曲部具有不与基板的外周侧壁部接触的曲率半径。
[0168]
[附记6]
[0169]
优选,提供附记5所述的基板处理装置,其中,
[0170]
当上述臂对基板进行支撑时,上述外周侧壁部的最向上述弯曲部侧突出的部分的位置位于比上述弯曲部的前端部的位置靠上方。
[0171]
[附记7]
[0172]
优选,提供附记4~6中任一方案所述的基板处理装置,其中,
[0173]
上述臂的上述弯曲部的前端的位置与上述臂的另一端的位置的差成为预定的范围的差。
[0174]
[附记8]
[0175]
根据本发明的另一方案,提供一种半导体装置的制造方法,其具有:
[0176]
在处理室内对基板进行处理的工序;
[0177]
从气体供给部向上述处理室内供给气体的工序;以及
[0178]
支撑基板的下表面并向配置在上述处理室内且具有载置基板的基板载置面的基板载置部输送该基板的输送工序,
[0179]
利用构成为支撑基板的支撑部具有倾斜的臂来进行上述输送工序。
[0180]
[附记9]
[0181]
根据本发明的又一方案,提供一种存储介质,其特征在于,存储利用计算机使基板处理装置执行以下步骤的程序,即:
[0182]
在处理室内对基板进行处理的步骤;
[0183]
从气体供给部向上述处理室内供给气体的步骤;以及
[0184]
利用构成为支撑基板的支撑部具有倾斜的臂,对基板的下表面进行支撑,并向配置在上述处理室内且具有载置基板的基板载置面的基板载置部输送该基板的输送步骤。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1