一种单脉冲天线跟踪校相方法与流程
1.本发明属于和差双通道或单通道单脉冲跟踪天线领域,具体涉及一种单脉冲天线跟踪校相方法。
背景技术:
2.单脉冲跟踪技术从20世纪50年代开始应用。大口径抛物面天线跟踪动态目标时,为了达到指定的跟踪精度,一般采用和差比幅式单脉冲跟踪。早期单脉冲跟踪采用多喇叭馈源,再通过合成网络输出和信号与差信号。随着微波技术的发展,圆波导多模自跟踪馈源替代了多喇叭馈源,在单脉冲跟踪天线中广泛使用。由于和信号与差信号的传输路径不同,相位延迟不同,需要对角度指向误差电压解调器的参考信号移相,抵消和差通道相位延迟差值,这样才能准确解调天线跟踪目标的角度指向误差电压。角度指向误差电压解调器的参考信号移相值求解过程简称跟踪校相。
3.第一种是经典的校相方法,天线指向标校源(包括标校塔、射电源、同步卫星等),在方位或俯仰轴偏离特定的角度,以激励差通道信号。接收机参考信号相位以步进方式移相,读取方位或俯仰误差电压,再通过曲线拟合,计算出参考信号移相值。天线指向标校源信号,校相精度高,可适用于多种频段。这种校相方法的缺点是依赖标校源,需存储多种设备组合移相值以备调用,准备时间长,效率低。
4.第二种是快速校相方法,由轨道预报数据引导天线跟踪目标,再设置特定的角度偏移量,分别记录移相90度、180度、270度时角度差解调器输出电压的变化值,再用曲线拟合求解和差通道相位延迟差值完成跟踪校相。该方法不依赖标校源,对跟踪目标实时校相,校相精度满足天线跟踪要求。这种快速校相方法在s频段和c频段应用比较好,在x、ku、ka等频段还没有成功应用的案例。这种快速校相方法的前提条件是在天线主波束内差信号方向图的差斜率线性度良好。在毫米波高频段,波束主瓣更窄,受天线面板表面精度误差和大口径天线重力形变等因素影响,导致天线差方向图近轴特性变差,差斜率有明显的非线性波动,拟合计算移相值偏差大,校相结果不能满足天线跟踪要求。
5.第三种方法是数据比对修正法,在有标校源可用的条件下完成跟踪校相并存储,再通过定向耦合器给跟踪链路注入信号,测试注入信号相位差并存储。在无标校源可用时,测试注入信号相位差的变化,修正早期存储的相位值。采用该方法校相精度不高,额外增加设备和工作量。
6.针对上述三种校相方法的缺点,本发明专利提出一种新型单脉冲跟踪校相技术。使用新型t21模信号合成器,在校相时隔离方位误差信号或俯仰误差信号,避免了交叉耦合,可以对跟踪目标实时快速校相。在天线跟踪目标过程中,依据天线归一化零深数据以及差信号电平变化,判决单脉冲跟踪状态。
技术实现要素:
7.针对现有技术中存在的上述技术问题,本发明提出了一种新型单脉冲天线跟踪校
相方法,设计合理,克服了现有技术的不足,具有良好的效果。
8.为了实现上述目的,本发明采用如下技术方案:
9.一种单脉冲天线跟踪校相方法,采用内置微波开关的t21模信号合成器,通过相位差测量技术实现单脉冲跟踪快速校相,具体包括如下步骤:
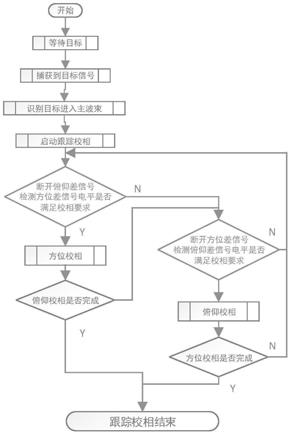
10.步骤1:等待目标;
11.步骤2:通过接收机捕获目标信号;
12.步骤3:识别目标进入主波束;
13.步骤4:启动跟踪校相程序;
14.步骤5:断开俯仰差信号,检测方位差信号电平是否满足校相要求;
15.若:方位差信号电平满足校相要求,则执行步骤6;
16.或方位差信号电平不满足校相要求,则执行步骤8;
17.步骤6:进行方位跟踪校相;
18.步骤7:判断俯仰校相是否完成;
19.若:俯仰校相已经完成,则执行步骤11;
20.或俯仰校相没有完成,则执行步骤8;
21.步骤8:断开方位差信号,检测俯仰差信号电平是否满足校相要求;
22.若:俯仰差信号电平满足校相要求,则执行步骤9;
23.或俯仰差信号电平不满足校相要求,则执行步骤5;
24.步骤9:进行俯仰跟踪校相;
25.步骤10:判断方位跟踪校相是否完成;
26.若:方位跟踪校相已经完成,则执行步骤11;
27.或方位跟踪校相没有完成,则执行步骤5;
28.步骤11:跟踪校相结束。
29.优选地,t21模信号合成器的内部设置有微波开关,通过微波开关隔离方位差信号或俯仰差信号,避免了二者的交叉耦合。
30.优选地,在步骤3中,接收机检测和、差信号电平,依据天线的和、差方向图数据,识别目标是否进入天线主波束。
31.优选地,在步骤6中,在做方位跟踪校相时,接收机控制t21模信号合成器内的微波开关,隔离了俯仰差信号,这样测量和差信号相位差等于和差通道相位延迟差值,完成方位跟踪校相。
32.优选地,在步骤9中,在做俯仰跟踪校相时,接收机控制t21模信号合成器内的微波开关,隔离了方位差信号,这样测量和差信号相位差等于和差通道相位延迟差值,完成俯仰跟踪校相。
33.优选地,在天线处于单脉冲跟踪状态时,接收机检测和信号与差信号电平,依据天线归一化零深数据以及差信号电平变化,判断单脉冲跟踪状态,在单脉冲跟踪异常时输出告警信息,角误差数据输出置零,避免造成天线驱动过冲或明显震荡。
34.本发明所带来的有益技术效果:
35.1、不依赖标校源,接收机捕获目标信号后能识别目标进入天线主波束,快速完成跟踪校相;
36.2、可根据跟踪目标特性不同,选择不同的相位差测量技术,提高快速校相精度;
37.3、在天线单脉冲跟踪过程中,实时监测和差两路信号电平变化,为单脉冲跟踪异常预警。
附图说明
38.图1为单一圆极化单脉冲跟踪链路组成框图;
39.图2为双极化跟踪模耦合器组合图;
40.其中,图(a)为耦合器a示意图;图(b)为耦合器b示意图;图(c)为组合的耦合器示意图;
41.图3为双极化差(δ)通道信号合成网络示意图;
42.图4为采用新型te21模合成器的双极化双通道单脉冲跟踪链路设备框图;
43.图5为采用新型te21模合成器的双极化单通道单脉冲跟踪设备组成框图;
44.图6为数字接收机校相流程图。
具体实施方式
45.下面结合附图以及具体实施方式对本发明作进一步详细说明:
46.一、单一极化馈源和(σ)通道信号与差(δ)通道信号相位关联分析
47.单脉冲跟踪天线通常采用圆波导多模馈源,te21模跟踪耦合器(te21 mode coupler)是差信号的源头。单脉冲跟踪天线采用圆极化方式跟踪圆极化目标是最常用的模式。本技术先以单一极化模式论述和差两道通信号的相位传输变化和跟踪校相原理。
48.te21模跟踪耦合器是位于天线馈源焦平面的环形四端口定向耦合器,也称为天线馈源接收波束角度传感器。耦合输出端口te21模信号的相位与馈源和路信号的相位有稳定的关联关系。方位te21模的两个耦合端口输出的信号相位差是180度,两个端口输出信号合成为方位差(δ
‑
xel)信号;同理,俯仰te21模的两个耦合端口输出的信号相位差也是180度,两个端口输出信号相合成为俯仰差(δ
‑
el)信号。方位差信号与俯仰差信号之间的相位差是90度,这两路信号再合成为一路差(δ
‑
channel)信号。图1是单一圆极化单脉冲跟踪链路设备组成框图。trk
‑
d/c是跟踪下变频器,dual
‑
ch dt是双通道数字接收机,acu是天线控制单元,servo是天线驱动伺服设备。
49.以单载波(cw)信号为例,主要是论证和信号与差信号的相位关系。在方位差信号与俯仰差信号合成前,设方位差信号为:
50.u
δxel
(t)=u
δxel
sin(ω0t),ω0为射频角频率,u
δxel
=γθ
δxel
,γ是差斜率。
51.则俯仰差信号为:
52.u
δel
(t)=u
δel
cos(ω0t),ω0为射频角频率,u
δel
=γθ
δel
,γ是差斜率。
53.根据辅助角公式,合成后的差信号为:
[0054][0055]
其中辅助角
[0056][0057]
方位差信号与俯仰差信号两路正交合成为差通道(δ
‑
channel)信号,馈送到低噪声放大器(δ
‑
lna)。和通道(σ
‑
channel)信号经过低噪声放大器输出,在输出端口通过定向耦合器的耦合端口输出。差通道射频(δ
‑
rf)信号与和通道射频(σ
‑
rf)信号都接入至跟踪下变频器(trk
‑
d/c),和、差两路射频信号共用本振源,变频为两路中频(if)70mhz信号。和、差两路中频70mhz信号接入至双通道接收机(dual
‑
ch dtr),和路中频信号经过变频锁相环与参考信号(10.7mhz)相位相关联。差路中频信号在接收机中变频为与参考信号同频的差路10.7mhz信号,差信号相位与参考信号相位有稳定的关联关系。由和路中频信号agc电平同时控制差路中频信号放大器的增益,完成和、差信号幅度归一化。
[0058]
设正交参考信号分别为sin(ω1t)、cos(ω1t),差路10.7mhz信号用公式(2)表达。
[0059][0060]
公式(2)中的参数:g为归一化增益,ω1中频锁相环参考信号角频率,是差信号与参考信号的相位差值。
[0061]
为了准确地分解还原方位差信号幅度和俯仰差信号幅度(线性比例),即要求解调后的信号幅度分别为:
[0062]
k为解调器增益
ꢀꢀꢀ
(3)
[0063]
k为解调器增益
ꢀꢀꢀ
(4)
[0064]
参考信号移相δ,相干解调乘法器三角函数表达式如下:
[0065][0066][0067]
经过低通滤波后,2次谐波被滤除,直流输出为:
[0068][0069][0070]
根据前面论述,当时,即可准确分解出方位差信号幅度和俯仰差信号幅度。可以令定义为和差通道相位延迟差值,这样定义就清晰了,和信号与差信号的相位差是由两个相位值线性叠加的,其中一个是方位差信号与俯仰差信号正交合成的辅助角,另一个是和通道与差通道相位的相位延迟差值。
[0071][0072][0073]
由上述公式(7)、(8)可以看出,只有当时,解调器才能准确分解方位差信号幅度和俯仰差信号幅度。当时,方位差信号幅度与俯仰差信号幅度分解不准确,也称交叉耦合。求解时对应的参考信号移相值δ就是跟踪校相。
[0074]
由于波纹喇叭t21模定向耦合输出端口至合成器之间的传输路径不同,可能会导致方位差信号与俯仰差信号正交性变差,方位差幅度相关解调器的参考信号移相值与俯仰差幅度相关解调器的参考信号移相值不一定是差90度,因此需要分别求解。
[0075]
二、双极化馈源和(σ)通道信号与差(δ)通道信号相位关联分析
[0076]
单脉冲跟踪天线一般要求可以跟踪不同极化的目标信号,馈源σ路输出是双线极化端口/双圆极化端口,线极化/圆极化模式可转换,馈源δ路是右旋圆极化(rhcp)与左旋圆极化(lhcp)二选一切换。单脉冲跟踪要求σ路与δ路极化匹配,接收机从δ路信号解调出方位角度误差和俯仰角度误差,需要σ路信号作参考。
[0077]
在圆波导波纹喇叭馈源的焦平面处,设置两个交错排列的差模耦合器。一个是垂直极化t21模耦合器(te21 mode coupler),另一个是水平极化t21模耦合器,图2为双极化跟踪模耦合器组合图。
[0078]
这两个相互正交的t21模耦合器,分别接入到两个四合一合成器(4:1combiner)。与垂直极化(v
‑
pol)t21模耦合器四个端口连接的是垂直极化t21模信号合成器,与水平极化(h
‑
pol)t21模耦合器四个端口连接的是水平极化t21模信号合成器。这两个不同极化的t21模合路器输出端口接入到微波混合接头组合(hybird junction)输出两路,一路为右旋圆极化波(rhcp),另一路为左旋圆极化波(lhcp)。若是接收线极化波束,微波混合接头把它分解为等幅的右旋圆极化波(rhcp)和左旋圆极化波(lhcp)。若是接收椭圆极化波束,由于椭圆极化波可分解为rhcp分量和lhcp分量,微波混合接头把它按椭圆极化轴比分解为不等幅的右旋圆极化波(rhcp)和左旋圆极化波(lhcp)。
[0079]
微波混合接头对传输信号的相位延迟由接收波束的极化特性决定的,是一个相对稳定值。δ路信号通过微波混合接头的相位延迟,是和、差通道相位延迟差值的一部分,经过跟踪校相移相抵消了,不会影响辅助角值。
[0080]
图3为双极化差(δ)通道信号合成网络示意图。
[0081]
三、新型单脉冲跟踪校相技术
[0082]
从前面的分析及公式(7)和(8)可以看出,和、差信号相位差由两部分组成,一个是
方位差信号与俯仰差信号正交合成的辅助角另一个是和差通道相位延迟差值因为有辅助角的存在,和差信号的相位差不同于和差通道相位延迟差值。
[0083]
本发明采用新型t21模信号合成器,在合成器内设置微波开关,方位差信号与俯仰差信号分合可控。在做方位跟踪校相时,接收机控制合成器内的微波开关,隔离了俯仰差信号,避免了辅助角的形成,这样测量和差信号相位差等于和差通道相位延迟差值,完成方位跟踪校相。同理,在做俯仰跟踪校相时,接收机控制合成器内的微波开关,隔离了方位差信号,避免了辅助角的形成,这样测量和差信号相位差等于和差通道相位延迟差值,完成俯仰跟踪校相。跟踪校相完成后,接收机控制合成器内的微波开关,方位差信号与俯仰差信号都接通,正交合成为差通道信号,接收机可以解调输出方位角误差电压和俯仰角误差电压给天线控制单元(acu)。图4是双极化馈源天线双通道单脉冲跟踪设备组成框图,八个te21模耦合输出端口用等长度的稳相电缆分别接入到两个4:1合路器输入端口。
[0084]
单通道单脉冲跟踪系统,差通道射频信号在跟踪下变频中先经过四相调制(qpsk),再与和通道射频信号合成一路射频信号,单通道射频信号经过一次变频到l频段送给接收机,简化了跟踪链路。其校相方法与双通道单脉冲跟踪系统的校相方法相同,图5是双极化馈源天线单通道单脉冲跟踪设备组成框图。
[0085]
采用这种新型单脉冲跟踪校相技术,不需要标校源辅助,可以对目标实时快速跟踪校相。天线处于等待点或在轨道数据引导下,接收机捕获目标信号。为了保证校相精度,接收机采集分析和差两个通道信号电平,依据天线的和信号接收方向图与差信号接收方向图的变化趋势,判断目标是否进入天线主瓣波束。当识别目标进入天线主瓣波束,启动跟踪校相处理。图6是数字接收机校相流程图。
[0086]
由于差信号与和信号同源,频率变换共本振,相位差测量可以采用数字正交相关积分法或快速傅立叶变换(fft)法。可以根据目标动态大小和信号强弱,设置数字接收机的校相算法。
[0087]
当跟踪目标动态大载噪比高时,采用数字正交相关积分法测量和、差信号相位差。在载波噪声谱密度46dbhz时,积分时间1ms,相位测量误差小于6度,满足单脉冲跟踪要求。
[0088]
当跟踪目标动态小载噪比低时,采用fft法测量和、差信号相位差。在载波噪声谱密度35dbhz时,由于目标动态小,选择n=2
15
,相位测量误差小于8度,满足单脉冲跟踪要求。
[0089]
数字接收机的角误差电压定向灵敏度标定,可以根据天线跟踪链路的差斜率和目标动态大小综合分析,设置不同的系数,采集acu角度偏置增量和对应的角误差电压增量,再通过数据拟合计算给出。
[0090]
在天线处于单脉冲跟踪状态时,接收机检测和信号与差信号电平,依据天线归一化零深数据以及差信号电平变化,判断单脉冲跟踪状态。在单脉冲跟踪异常时输出告警信息,角误差数据输出置零,避免造成天线驱动过冲或明显震荡。
[0091]
当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1