一种激光光束位置和角度控制系统及控制方法与流程
1.本发明涉及激光器技术领域,尤其涉及一种激光光束位置和角度控制系统及控制方法。
背景技术:
2.激光器在微加工、物理学、生物学、化学控制反应和光通讯等领域都具有广泛应用。激光器的输出光束的指向稳定性是激光器在实际应用中的一个重要指标。在微加工领域中,激光光束的指向稳定性会影响加工精度与效果;在远距离通讯或探测领域中,激光光束的位置偏差会直接影响通讯或探测结果;在高精度的物理学实验中,也需要激光光束精确、稳定的与目标靶持续发生物理效应,不能因为指向性漂移而导致脱靶。
3.激光器即使工作在环境相对稳定的实验室条件中,其激光光束指向性也不能做到完全不变;在户外、车载、机载等实际应用环境中,其激光光束指向性变化将严重影响使用效果。另外,激光器在实际使用中,也有对功率等参数进行实时调节的需求,在激光器参数调节时,其激光光束指向性通常也会发生变化。因此,解决激光器激光光束指向不稳定的技术问题,具有重要意义。
技术实现要素:
4.本发明旨在提出一种激光光束位置和角度控制系统及控制方法,能够有效地调整激光光束的位置和角度,解决激光器光束指向不稳定的技术问题。
5.本发明提供一种激光光束位置和角度控制系统,包括:激光器、第一楔形石英玻璃片、第二楔形石英玻璃片、调节机构、相机和控制器;
6.所述第一楔形石英玻璃片和所述第二楔形石英玻璃片依次设置在所述激光器的光路上;所述第一楔形石英玻璃片与所述第二楔形石英玻璃片配合,用于调节所述激光器的输出光束的指向;
7.所述调节机构与所述第一楔形石英玻璃片连接,用于调整所述第一楔形石英玻璃片的位置和/或偏转角度;
8.所述相机用于监测所述第二楔形石英玻璃片入射面和出射面反射的所述输出光束的第一光斑和第二光斑在所述相机中的位置;
9.所述控制器分别与所述调节机构和所述相机电性连接,用于根据所述第一光斑和所述第二光斑在所述相机中的位置与预定位置的偏差,解算施加给所述调节机构的驱动信号,以实时调整所述第一楔形石英玻璃片的位置和/或偏转角度,使得所述第一光斑和所述第二光斑在所述相机中的位置与所述预定位置重合。
10.进一步地,所述激光器为固体激光器、光纤激光器、半导体激光器或者气体激光器。
11.进一步地,所述激光器的输出光束为连续输出光或者脉冲输出光。
12.进一步地,所述激光器的输出光束的波长范围为紫外光波段、可见光波段或者红
外光波段。
13.进一步地,所述第一楔形石英玻璃片的楔形角为1~45度。
14.进一步地,所述第一楔形石英玻璃片的入射面和出射面均镀有增透膜。
15.进一步地,所述第一楔形石英玻璃片和所述第二楔形石英玻璃片的材质分别为紫外熔融石英、n-bk7、jgs1或者k9。
16.进一步地,所述第二楔形石英玻璃片的楔形角为1~45度。
17.进一步地,所述第二楔形石英玻璃片的入射面和出射面均镀有增透膜。
18.本发明还提出一种采用上述激光光束位置和角度控制系统的控制方法,包括如下步骤:
19.监测所述第二楔形石英玻璃片入射面和出射面反射的所述输出光束的第一光斑和第二光斑在所述相机中的位置;
20.根据所述第一光斑和所述第二光斑在所述相机中的位置与预定位置的偏差,解算施加给所述调节机构的驱动信号,以实时调整所述第一楔形石英玻璃片的位置和/或偏转角度,使得所述第一光斑和所述第二光斑在所述相机中的位置与所述预定位置重合。
21.本发明的实施例提供的技术方案带来的有益效果是:本发明实施例中激光光束位置和角度控制系统包括激光器、第一楔形石英玻璃片、第二楔形石英玻璃片、调节机构、相机和控制器;通过将所述第一楔形石英玻璃片和所述第二楔形石英玻璃片依次设置在所述激光的光路上,将所述控制器分别与所述调节机构和所述相机电性连接,并通过所述调节机构调节所述第一楔形石英玻璃片的位置和/或偏转角度;使用时,利用所述第二楔形石英玻璃片对所述激光器的输出光束进行采样,将所述第二楔形石英玻璃片入射面和出射面反射的所述激光器的输出光束的第一光斑和第二光斑分别成像在所述相机上;根据将所述第一光斑和所述第二光斑在所述相机中的位置与预定位置的偏差,解算施加给所述调节机构的驱动信号;所述调节机构根据所述驱动信号实时调整所述第一石英玻璃片的位置和/或偏转角度,使得所述第一光斑和所述第二光斑的位置与所述预定位置重合,所述第二石英玻璃片配合所述第一楔形石英玻璃片使得所述激光器的输出光束在目标点的位置及入射角度保持不变,实现对所述激光器的输出光束的指向调节,达到对所述激光器输出光的输出位置及角度锁定的目的;同时,通过使用一个相机同时监测所述第二楔形石英玻璃片入射面和出射面反射的所述第一光斑和所述第二光斑两个位置,降低了器件成本与光路复杂度;另外,通过使用透射式调节系统对所述激光器的输出光束的指向进行调节,所述输出光不需反射折叠,不需要增加光程,缩小了所述激光光束位置和角度控制系统的体积。
附图说明
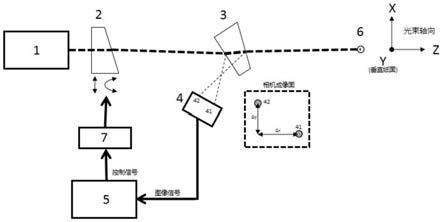
22.图1为本发明某一实施例中激光光束位置和角度控制系统的结构示意图;
23.图2为图1激光光束位置和角度控制系统中调节机构7的立体结构示意图;
24.其中,1、激光器;2、第一楔形石英玻璃片;3、第二楔形石英玻璃片;4、相机;41、第一光斑;42、第二光斑;5、控制器;6、目标点;7、调节机构;701、机械夹具;702、压电陶瓷。
具体实施方式
25.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并
与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
26.请参考图1,本发明的实施例提供了一种激光光束位置和角度控制系统,包括:激光器1、第一楔形石英玻璃片2、第二楔形石英玻璃片3、调节机构7、相机4和控制器5;
27.第一楔形石英玻璃片2和第二楔形石英玻璃片3依次设置在激光器1的光路上;第一楔形石英玻璃片2与第二楔形石英玻璃片3配合,用于调节激光器1的输出光束的指向;
28.所述调节机构7与第一楔形石英玻璃片2连接,用于调整第一楔形石英玻璃片2的位置和/或偏转角度;
29.相机4用于监测第二楔形石英玻璃片3入射面和出射面反射的所述输出光束的第一光斑41和第二光斑42在相机4中的位置;
30.控制器5分别与所述调节机构7和相机4电性连接,用于根据第一光斑41和第二光斑42在相机4中的位置与预定位置的偏差,解算施加给所述调节机构7的驱动信号,以实时调整第一楔形石英玻璃片2的位置和/或偏转角度,使得第一光斑41和第二光斑42在相机4中的位置与所述预定位置重合。
31.进一步地,相机4使用ccd或cmos传感器,探测直径大于1毫米,像素数量大于1mpixel,可实时输出图像信息;控制器5包括pc控制器或者单片机控制器。
32.进一步地,激光器1为固体激光器、光纤激光器、半导体激光器或者气体激光器;激光器1的输出光束为连续输出光或者脉冲输出光;激光器1的输出光束的波长范围为紫外光波段、可见光波段或者红外光波段。
33.进一步地,第一楔形石英玻璃片2和第二楔形石英玻璃片3的楔形角为1~45度;第一楔形石英玻璃片2和第二楔形石英玻璃片3的入射面和出射面均镀有增透膜;第一楔形石英玻璃片2和第二楔形石英玻璃片3的材质分别为紫外熔融石英、n-bk7、jgs1或者k9。
34.采用本实施例中激光光束位置和角度控制系统的控制方法,包括如下步骤:
35.相机4监测第二楔形石英玻璃片3入射面和出射面反射的所述输出光束的第一光斑41和第二光斑42在相机4中的位置;
36.控制器5根据第一光斑41和第二光斑42在相机4中的位置与预定位置的偏差,解算施加给所述调节机构7的驱动信号,以实时调整第一楔形石英玻璃片2的位置和/或偏转角度,使得第一光斑41和第二光斑42在相机4中的位置与所述预定位置重合。
37.示例性地,在本实施例中,激光器1为飞秒脉冲激光器,具体指标为脉冲重复频率为100khz,中心波长为1030nm,脉冲能量为1mj;激光器1可以通过软件操作调节泵浦电流来实现功率调节,功率调节范围为0~100w;激光器1还可以通过软件操作移动激光器1内部的光学器件来实现脉冲调节,脉冲宽度调节范围为400飞秒至10皮秒;第一光斑41和第二光斑42的直径为2mm,偏振态为水平方向。
38.激光器1的输出光束首先经过第一楔形石英玻璃片2;第一楔形石英玻璃片2的直径为12.7mm,材质为紫外熔融石英,厚度为5mm,楔形角为10度,楔形角的方向如图1所示;第一楔形石英玻璃片2与激光器1的距离为50mm,第一楔形石英玻璃片2的入射面与激光器1的输出光束垂直;第一楔形石英玻璃片2的入射面与出射面分别镀设有透射率大于99%的增透膜,以减少激光器1的功率损耗;第一楔形石英玻璃片2固定在相对于激光器1的输出光束传输方向z的位置与偏转角度可调的调节机构7上,调节轴包括x方向的移动量,y方向的移动量,x方向的偏转角度,y方向的偏转角度;所述调节机构7通过四个压电陶瓷对上述四轴
分别进行调节。
39.需要说明的是,只要是能够实现第一楔形石英玻璃片2在x方向的移动量,y方向的移动量,x方向的偏转角度,y方向的偏转角度的调节机构7均可应用于本发明。
40.示例性地,参考图2,在本实施例中,调节机构7包括机械夹具701和四个压电陶瓷702;压电陶瓷702和第一楔形石英玻璃片2均设置在机械夹具701上;通过压电陶瓷702能够实现第一楔形石英玻璃片2在x方向的移动量,y方向的移动量,x方向的偏转角度,y方向的偏转角度的调节;所述机械夹具和所述压电陶瓷均为现有技术,故不在此赘述其具体结构。
41.经过第一楔形石英玻璃片2后的激光器1的输出光束再经过第二楔形石英玻璃片3;第二楔形石英玻璃片3的直径为12.7mm,材料为紫外熔融石英,厚度为5mm,楔形角为10度,楔形角方向如图1所示;第二楔形石英玻璃片3与第一楔形石英玻璃片2的距离为50mm,位置固定不动;第二楔形石英玻璃片3的入射面与出射面均镀设有透射率大于99%的增透膜;在第二楔形石英玻璃片3的入射面,激光器1的输出光束的入射角为30度,反射角为30度;入射光束与反射光束都在xz平面内,入射面反射的光束成像在相机4上,为第一光斑41;第二楔形石英玻璃片3以入射面与所述入射光束的交点为中心绕z轴旋转45度;由于楔形角的存在,第二楔形石英玻璃片3的出射面反射的光束不在xz平面内,成像在相机4上,为第二光斑42;第一光斑41与第二光斑42的直径为2mm,水平(x)方向的间距δx为10mm,垂直(y)方向的间距δy为10mm;第一光斑41和第二光斑42的功率小于1w;经过第二楔形石英玻璃片3的激光器1的输出光束继续传输至目标点6。
42.示例性地,在本实施例中,相机4为带功率衰减片的ccd相机,有效探测尺寸36
×
24mm,像素数为15.7mpixel,通讯方式为firewire;相机4与第二楔形石英玻璃片3的距离为20mm,使得第二楔形石英玻璃片3的入射面与出射面的反射所述输出光束的第一光斑41和第二光斑42分别成像在相机4的有效探测尺寸内;相机4将图像信号传送给控制器5。
43.示例性地,在本实施例中,控制器5为基于arm架构的微处理器模块,该模块包含图像处理功能,负责接收相机4的图像信号,对图像进行分析,计算出第一光斑41和第二光斑42的位置,并通过对图像的重复采集,获取第一光斑41和第二光斑42的位置实时变化量信息,激光器1的输出光束经过目标点6时的第一光斑41和第二光斑42的初始位置为预定位置;根据将移动后的第一光斑41与第二光斑42的位置与所述预定位置偏差,得到第一光斑41和第二光斑42的位置变化量信息,并通过控制器5计算出第一楔形石英玻璃片2的四个移动轴所需的移动量;控制器5包含压电陶瓷驱动功能,将计算出的第一楔形石英玻璃片2的移动量对应的电压发送给所述调节机构7,通过所述调节机构7控制第一楔形石英玻璃片2移动。
44.激光器1的输出光束最后传输至目标点6;目标点6需要的光束直径为2mm,在激光器1持续工作过程中,需要激光器1的输出光束的移动变化范围小于5μm;目标点6需要的激光器1的输出光束的入射角为0度,在激光器1持续工作过程中,需要激光器1的输出光束的角度变化范围小于100μrad。
45.当激光器1进行脉冲宽度调节时,由于激光器1内光学器件的移动,输出光束不可避免地会产生位置及角度偏移,在没有所述激光光束位置和角度控制系统的情况下,激光器1的输出光束会偏离目标点6,不满足使用要求;当激光器1进行功率调节时,特别是当激光器1处于户外、车载、机载等不稳定的工作环境中,激光器1的输出光束的指向稳定性问题
将更加严重。
46.当所述激光光束位置和角度控制系统处于工作状态下,当激光器1的输出光束产生x方向的位置偏移时,相机4探测到的第一光斑41与第二光斑42将会同时产生x方向的变化,且变化量相同或接近相同;控制器5根据此时第一光斑41和第二光斑42的位置相对于所述预定位置的变化量调节输出到控制第一楔形石英玻璃片2的x方向位移的所述调节机构7中的压电陶瓷的电压,改变第一楔形石英玻璃片2的位置,补偿激光器1的输出光束在x方向产生的位置偏移,使得激光器1的输出光束在目标点6的位置与入射角度不变。
47.举例说明,首先激光器1处于稳定状态,激光器1的输出光束在目标点6的位置与入射角度满足使用要求,相机4探测到第一光斑41和第二光斑42,并记录其位置;保持第二楔形石英玻璃片3的位置不变,控制第一楔形石英玻璃片2在x方向位移量的压电陶瓷电压为50v;使用的压电陶瓷电压调节范围为0-150v,对应移动范围为2mm;当激光器1变得不稳定,产生移动,光束往x方向移动5μm时,相机4探测到的第一光斑41和第二光斑42将会同时产生x方向的变化为10μm,激光器1的输出光束在目标点6的位置移动5μm;根据公式,第一楔形石英玻璃片2的移动量=70
×
光斑移动量,得到第一楔形石英玻璃片2需要移动700μm;需要将控制第一楔形石英玻璃片2在x方向位移量的压电陶瓷的电压从50v增加到102.5v;相机4探测到的第一光斑41和第二光斑42将会与所述预定位置重合;激光器1的输出光束在目标点6的位置与入射角度也恢复原位;上述描述同样适用于y方向的调节。
48.当激光器1的输出光束产生x方向的角度偏移时,相机4探测到的第一光斑41和第二光斑42将会同时产生x方向的变化,且变化量不同;控制器5根据第一光斑41和第二光斑42的变化量调节输出到控制第一楔形石英玻璃片2的x方向的倾斜角的压电陶瓷的电压,改变第一楔形石英玻璃片2的角度,补偿激光器1的输出光束在x方向产生的角度偏移;调节角度的同时,也需要调节输出到控制第一楔形石英玻璃片2的x方向位移的压电陶瓷的电压;同时改变第一楔形石英玻璃片2的角度与位置,使得激光器1的输出光束在目标点6的位置与入射角度不变。
49.举例说明,首先激光器1处于稳定状态,光束在目标点6的位置与入射角度满足使用要求,相机4探测到第一光斑41和第二光斑42,并记录其位置;保持第二楔形石英玻璃片3的位置不变,控制第一楔形石英玻璃片2在x方向位移量的压电陶瓷与控制第一楔形石英玻璃片2在x方向角度的压电陶瓷电压都为50v;当激光器1变得不稳定,产生移动,激光器1的输出光束往x方向角度偏移100μrad时,相机4探测到的第一光斑41将会产生x方向的变化为14.4μm,相机4探测到的第二光斑42将会产生x方向的变化为13.1μm,激光器1的输出光束在目标点6的位置偏移为13.1μm,角度偏移100μrad;先调节第一楔形石英玻璃片2在x方向位移量进行位置补偿,根据公式,第一楔形石英玻璃片2移动量=63
×
第二光斑42移动量,得到第一楔形石英玻璃片2需要移动830μm;需要将控制楔形石英玻璃片x方向位移量的压电陶瓷的电压从50v增加到112.25v;此时,相机4探测到的第二光斑42将会恢复原位,与所述预定位置重合;相机4探测到的第一光斑41移动13.1μm,还需移动1.3μm才能恢复原位;再调节第一楔形石英玻璃片2在x方向倾斜角进行角度补偿,根据公式,第一楔形石英玻璃片2的倾斜角=200
×
第一光斑41的剩余移动量,得到第一楔形石英玻璃片2需要倾斜260μrad;需要控制第一楔形石英玻璃片2在x方向位移量的压电陶瓷的电压从50v增加到52.4v;相机4探测到的第一光斑41和第二光斑42将会恢复原位,与所述预定位置重合;激光器1的输出光
束在目标点6的位置与入射角度也恢复原位;上述描述同样适用于y方向的调节。
50.以上未涉及之处,适用于现有技术。
51.在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本技术请求保护的范围。
52.在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
53.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1