一种动中通天线系统和载体的制作方法
1.本发明涉及通信技术领域,尤其涉及一种动中通天线系统和载体。
背景技术:
2.目前,现有成熟的动中通卫星天线,多是用于与地球同步轨道卫星通信的天线,地球同步轨道卫星的特点是:地面相对于地球同步轨道卫星的指向角是固定不变的,当安装动中通卫星天线的载体如船只或车辆等运动时,只需要隔离载体的运动,保持动中通卫星天线指向不会随着载体运动而偏离目标卫星,以达到实时通信的目的。
3.现在的低轨卫星,多使用x频段(根据ieee 521-2002标准,x波段是指频率在8-12ghz的无线电波波段,在电磁波谱中属于微波)进行测控和数传,天线形式基本都是路基固定站,但固定站建设成本高昂,灵活性差,想要多次测控就需要在不同位置大量建设路基固定站,大大提高了整个系统的成本,难以满足多样化的需求。
4.而且,随着低轨卫星的数量不断增多,以及各国如火如荼的互联网星座计划的建立,对于在茫茫大海中航行的船只,也急需一款能够用于与低轨卫星进行通信的动中通天线系统。
技术实现要素:
5.本发明所要解决的技术问题是针对现有技术的不足,提供了一种动中通天线系统和载体。
6.本发明的一种动中通天线系统的技术方案如下:
7.用于安装在载体上,包括具有天线的天馈系统,以及设有组合惯导系统的伺服控制系统;
8.所述伺服控制系统用于:通过所述组合惯导系统采集所述载体的航向角和姿态,并根据所述载体的航向角和姿态调整所述天线指向目标卫星的指向角至预设指向角范围内;
9.所述天馈系统用于通过所述天线与所述目标卫星进行通讯。
10.本发明的一种动中通天线系统的有益效果如下:
11.伺服控制系统通过组合惯导系统采集载体的航向角和姿态,并根据载体的航向角和姿态调整天线指向目标卫星的指向角至预设指向角范围内,能够保证天线指向准确,进而达到通过天馈系统与目标卫星进行实时通讯的目的,在目标卫星为低轨卫星或地球同步轨道卫星时均适用,可将动中通天线系统快速部署到船只或车辆等移动载体上,更加机动灵活,降低建设成本。
12.在上述方案的基础上,本发明的一种动中通天线系统还可以做如下改进。
13.进一步,所述天线设有方位-俯仰-横滚三轴运动机构,所述伺服控制系统具体用于:
14.根据所述载体的航向角和姿态计算所述载体的方位角度、俯仰角度和横滚角度,
根据所述载体的方位角度、俯仰角度和横滚角度,驱动所述方位-俯仰-横滚三轴运动机构,以调整所述天线指向目标卫星的指向角至预设指向角范围内。
15.进一步,所述伺服控制系统还用于:
16.当所述目标卫星为低轨卫星时,根据所述目标卫星的轨道运动数据,驱动所述方位-俯仰-横滚三轴运动机构,以使所述天线在所述预设指向角范围内进行圆锥渐进式扫描,并控制所述天线指向通讯信号最大值对应的方向。
17.采用上述进一步方案的有益效果是:低轨卫星不同于地球同步轨道卫星,其绕地球运行周期短,再叠加上地球的自转运动,故低轨卫星入境的轨道为一条弧线,按照目标卫星的轨道运动数据驱动天线在所述预设指向角范围内进行圆锥渐进式扫描,不断修正天线跟踪轨道,使天线指向通讯信号最大值对应的方向,从而实现与目标卫星之间的稳定通信。
18.进一步,所述伺服控制系统通过pid控制器驱动所述方位-俯仰-横滚三轴运动机构。
19.进一步,所述天线为抛物面天线。
20.采用上述进一步方案的有益效果是:天线为抛物面天线时,成本低,可靠性强。
21.本发明的一种载体的技术方案如下:包括上述任一项所述的一种动中通天线系统。
附图说明
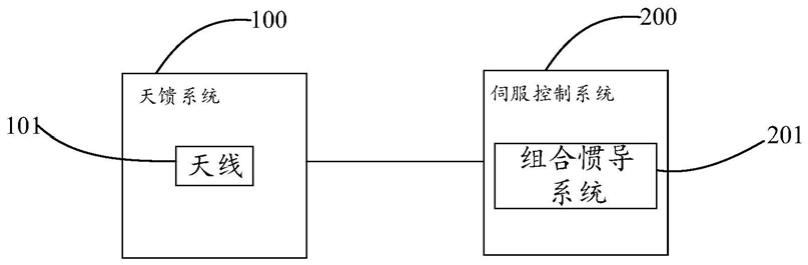
22.图1为本发明实施例的一种动中通天线系统的结构示意图;
23.图2为天馈系统的结构示意图;
24.图3为伺服控制系统的结构示意图;
25.图4为伺服控制系统的工作原理示意图;
26.图5为圆锥渐进式扫描的示意图。
27.附图中,各标号所代表的部件列表如下:
28.100、天馈系统;101、天线;102、馈源喇叭;103、极化旋转关节;104、正交模耦合器;105、发阻滤波器;106、低噪声放大器;200、伺服控制系统;201、组合惯导系统;202、伺服控制器;203、伺服电机;204、零位开关;205、编码器;206、pid控制器;207、方位伺服电机;208、俯仰伺服电机;209、横滚伺服电机。
具体实施方式
29.如图1所示,本发明实施例的一种动中通天线系统,用于安装在载体上,包括具有天线101的天馈系统100,以及设有组合惯导系统201的伺服控制系统200;
30.所述伺服控制系统200用于:通过所述组合惯导系统201采集所述载体的航向角和姿态,并根据所述载体的航向角和姿态调整所述天线101指向目标卫星的指向角至预设指向角范围内;
31.所述天馈系统100用于通过所述天线101与所述目标卫星进行通讯。
32.伺服控制系统200通过组合惯导系统201采集载体的航向角和姿态,并根据载体的航向角和姿态调整天线101指向目标卫星的指向角至预设指向角范围内,能够保证天线101指向准确,进而达到通过天馈系统100与目标卫星进行实时通讯的目的,在目标卫星为低轨
卫星或地球同步轨道卫星时均适用,可将动中通天线系统快速部署到船只或车辆等移动载体上,更加机动灵活,降低建设成本。
33.以目标卫星为低轨卫星为例进行说明,具体地:目前低轨卫星多使用x频段进行测控和数传,因此需要采用x频段的天馈系统100,包括天线101、馈源喇叭102、极化旋转关节103、正交模耦合器104、发阻滤波器105、低噪声放大器106(lna:low noise amplifier)和调制解调器即modem,工作原理如图2所示:
34.接收过程为:天线101的反射面把目标卫星发出的来波信号聚焦到馈源喇叭102内,经过极化旋转关节103到达正交模耦合器104内,耦合到发阻滤波器105,再输入lna,lna对信号进行滤波和放大处理,然后通过射频线传送至modem,进行解调,实现对目标卫星的来波信号的接收;
35.发射过程为:modem调制的信号,经射频线进入正交模耦合器104,再进入极化旋转关节103进入经波导进入馈源喇叭102,并经天线101辐射出去,实现信号的发射,由此实现与与目标卫星之间的实时通讯。
36.较优地,在上述技术方案中,所述动中通天线设有方位-俯仰-横滚三轴运动机构,所述伺服控制系统200具体用于:
37.根据所述载体的航向角和姿态计算所述载体的方位角度、俯仰角度和横滚角度,根据所述载体的方位角度、俯仰角度和横滚角度,驱动所述方位-俯仰-横滚三轴运动机构,以调整所述天线101指向目标卫星的指向角至预设指向角范围内,采用方位-俯仰-横滚的三轴运动机构,可以对天馈系统100的天线101进行更稳定的运动控制,同时也可以很好地解决卫星过顶跟踪问题,防止信号丢失,提高与目标卫星进行通讯的稳定性。
38.其中,方位-俯仰-横滚三轴运动机构的可采用申请号为202110091478.x、主体名称为一种船载动中通天线中所公开的结构转台,或者采用市面上现有的方位-俯仰-横滚三轴运动机构。
39.如图3所示,伺服控制系统200包括伺服电机203、编码器205、零位开关204、组合惯导系统201、伺服控制器202组成。其中,伺服控制器202是整个伺服控制系统200的控制中心,其负责伺服电机203的控制,还负责对组合惯导系统201、编码器205、零位开关204和modem等各部件的数据采集和控制,编码器205用于天线101的方位角度、俯仰角度和横滚角度的采集,组合惯导系统201稳控算法运算和执行等功能。零位开关204为光电传感器,用于系统初始上电寻零功能。组合惯导系统201为双gps组合惯导系统201或bd组合惯导系统201,其中,双gps组合惯导系统201具有两套独立gps天线和接收机,通过对两个gps天线基线向量的解算,得出两个天线连线与真北的夹角,从而可以进一步计算出载体的航向角;以组合惯导系统201为双gps组合惯导系统201为例进行说明,具体地:
40.伺服控制系统200中的组合惯导系统201通过采集双gps信号,即第一gps信号和第二gps信号,可以实时获取载体的航向角,再结合内部陀螺、加速度计等传感器,可以实时解算出载体的方位角度、俯仰角度和横滚角度,伺服控制器202采集这些数据,进行坐标姿态矩阵变换,解算出姿态角度,再经过pid控制器206驱动方位-俯仰-横滚三轴运动机构的伺服电机203,使方位-俯仰-横滚三轴运动机构的方位轴、俯仰轴和横滚轴转动,在此过程中,编码器205实时反馈方位-俯仰-横滚三轴运动机构的方位轴、俯仰轴和横滚轴的实时角度,反馈给伺服控制器202,形成闭环控制,提供控制的实时性和可靠性,进而调整所述天线101
指向目标卫星的指向角至预设指向角范围内,由此隔离本技术的动中通天线系统与载体之间的运动,使天馈系统100的天线101的姿态始终保持稳定,具体控制流程如图4所示。其中,方位-俯仰-横滚三轴运动机构的伺服电机203包括方位伺服电机207、俯仰伺服电机208和横滚伺服电机209,那么:
41.通过驱动方位伺服电机207能够控制方位-俯仰-横滚三轴运动机构的方位轴的转动,进而调整天线101的方位角度;通过驱动俯仰伺服电机208能够控制方位-俯仰-横滚三轴运动机构的俯仰轴的转动,进而调整天线101的俯仰角度;通过驱动横滚伺服电机209能够控制方位-俯仰-横滚三轴运动机构的横滚轴的转动,进而调整天线101的横滚角度;由此能够调整所述天线101指向目标卫星的指向角至预设指向角范围内。
42.较优地,在上述技术方案中,所述伺服控制系统200还用于:
43.当所述目标卫星为低轨卫星时,根据所述目标卫星的轨道运动数据,驱动所述方位-俯仰-横滚三轴运动机构,以使所述天线101在所述预设指向角范围内进行圆锥渐进式扫描,并控制所述天线101指向通讯信号最大值对应的方向。
44.其中,可通过站控软件将目标卫星的轨道运动数据发送至伺服控制系统200,站控软件负责任务管理,人机交互和卫星轨道预报等功能。用户通过站控软件,查看目标卫星的入境时间预报信息、入境时长、最高仰角等信息,及时安排测控和数传任务,站控软件根据用户下达的卫星测控和数传任务,将目标卫星入境轨道信息下达至伺服控制器202,伺服控制器202响应轨道信息并驱动天线101对目标卫星进行跟踪和通信。
45.其中,低轨卫星不同于地球同步轨道卫星,其绕地球运行周期短,再叠加上地球的自转运动,故低轨卫星入境的轨道为一条弧线,站控软件通过目标卫星的tle参数((tle:two-line-orbital element,两行轨道数据)可以预测目标卫星入境轨道的时间和指向角,按照目标卫星的轨道运动数据驱动天线101在所述预设指向角范围内进行圆锥渐进式扫描,不断修正天线101跟踪轨道,使天线101指向通讯信号最大值对应的方向,从而实现与目标卫星之间的稳定通信。具体地:
46.天线101在跟踪过程中,首先通过伺服控制系统200隔离载体运动使天线101保持稳定,同时,天线101按照目标卫星的轨道进行圆锥渐进式扫描,并通过modem反馈信号强度。圆锥渐进式扫描为伺服控制系统200驱动天线101跟踪卫星一种方式,即在动中通天线搜索到卫星信号后,通过在较小范围内转动天线101,采集一圈中的信号强度,取信号最强点,在下一圈运动中围绕再该点做圆锥运动,经过多次调整,使天线101逐渐对准卫星。由于低轨卫星入境轨迹为一条弧线,本系统在进行圆锥扫描时,结合轨道预报数据,围绕预报轨道做圆锥扫描,当发现信号最强点偏离预报轨道时,根据偏离的差值自动修正跟踪轨道,使天馈系统100的天线101始终指向通讯信号最大值对应的方向,从而实现稳定通信。本文中将此运动过程命名为圆锥渐进式扫描跟踪。圆锥渐进式扫描示意图如下图5所示。
47.较优地,在上述技术方案中,所述天线101为抛物面天线。天线101为抛物面天线时,成本低,可靠性强。
48.本发明实施例的一种载体,包括上述任一实施例中的一种动中通天线系统。载体为船只或车辆等。
49.在本发明中,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明
示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
50.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
51.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1