用于在焊接设备中传送晶粒的装置以及方法、焊接设备与流程
1.本发明涉及用于在焊接设备中传送晶粒的装置以及方法,更具体地提供能够有效地传送具有薄厚度的晶粒的装置以及方法。
背景技术:
2.半导体制造工艺作为在晶圆上制造半导体元件的工艺,例如包括曝光、蒸镀、蚀刻、离子注入、清洗等。可以通过半导体制造工艺对以芯片单位构成的晶粒,执行向用于封装的基板(例:pcb(printed circuit board))焊接各晶粒的工艺。
3.各晶粒在附着于切割胶带的状态下,通过顶推器推举并通过拾取器粘连而传送。另一方面,随着晶粒的厚度变得非常薄,在研究用于最小化施加于晶粒的冲击的同时拾取晶粒的方案。
技术实现要素:
4.因此,本发明的实施例提供能够有效地传送具有薄的厚度的晶粒的装置以及方法。
5.本发明的解决课题不限于以上提及的,本领域技术人员可以从下面的记载明确地理解未提及的其它解决课题。
6.根据本发明的实施例的用于在半导体晶粒焊接设备中传送晶粒的装置包括:顶推器,在下方推举附着于切割胶带的晶粒;顶推器控制部,控制所述顶推器的上升或者下降;气体流动部,位于所述顶推器的内侧并形成用于施加真空压力的气体的流动路径;气流控制部,控制成通过所述气体流动部施加所述真空压力;胶带吸附部,位于所述顶推器的外侧并使用真空压力吸附所述切割胶带;拾取器,在上方吸附并传送所述晶粒;以及拾取器控制部,控制所述拾取器的升降驱动。所述拾取器控制部使所述拾取器下降以使所述拾取器接触于所述晶粒的上端,在所述拾取器接触于所述晶粒的上端的状态下,所述顶推器控制部以及所述拾取器控制部使所述顶推器以及所述拾取器上升第一高度,在通过所述气流控制部向下方施加有真空压力的状态下,所述拾取器控制部使所述拾取器上升第二高度。
7.在一实施例中,可以是,所述气体流动部形成用于向所述晶粒施加空气压力的路径,所述气流控制部控制成通过所述气体流动部施加所述空气压力,并在所述拾取器从所述顶推器隔开的状态下向上方施加空气压力。
8.在一实施例中,可以是,所述气流控制部控制成在所述拾取器下降的期间向下方施加真空压力。
9.在一实施例中,可以是,所述气流控制部控制成当所述拾取器接触于所述晶粒的上端时解除所述真空压力。
10.在一实施例中,可以是,所述气流控制部控制成在所述顶推器以及所述拾取器上升所述第一高度的期间向下方施加真空压力。
11.在一实施例中,可以是,所述顶推器包括:第一顶推器,形成为环绕所述气体流动
部;以及第二顶推器,形成为环绕所述第一顶推器。
12.在一实施例中,可以是,所述顶推器控制部单独控制所述第一顶推器以及所述第二顶推器的上升。
13.在一实施例中,可以是,所述拾取器控制部在所述拾取器接触于所述晶粒的上端并上升的期间,控制所述拾取器对应于所述第一顶推器以及所述第二顶推器中位于上端的顶推器一起上升。
14.在一实施例中,可以是,所述顶推器控制部使所述第一顶推器以及所述第二顶推器上升所述第一高度,并在将所述第一顶推器固定的状态下使所述第二顶推器下降至所述第一高度的中间位置。
15.在一实施例中,可以是,所述顶推器控制部使所述第一顶推器以及所述第二顶推器上升至所述第一高度的中间位置,并在将所述第二顶推器在所述中间位置固定的状态下使所述第一顶推器上升。
16.在一实施例中,可以是,所述第一高度和所述第二高度设定成彼此不同。
17.在一实施例中,可以是,所述第二高度设定成小于所述第一高度。
18.根据本发明的实施例的用于在半导体晶粒焊接设备中传送晶粒的方法包括:使得附着在切割胶带的状态的晶粒位于顶推器的上方的步骤;使拾取器下降以使所述拾取器接触于所述晶粒的上端的步骤;在所述拾取器接触于所述晶粒的上端的状态下使所述顶推器以及所述拾取器上升第一高度的步骤;在向下方施加有真空压力的状态下使所述拾取器上升第二高度的步骤;以及在所述拾取器从所述顶推器隔开的状态下向上方施加空气压力的步骤。
19.在一实施例中,可以是,使所述拾取器下降的步骤包括在所述拾取器下降的期间向下方施加真空压力的步骤。
20.在一实施例中,可以是,使所述拾取器下降的步骤包括当所述拾取器接触于所述晶粒的上端时解除所述真空压力的步骤。
21.在一实施例中,可以是,所述顶推器包括形成为环绕被施加所述真空压力或者空气压力的气体流动部的第一顶推器以及形成为环绕所述第一顶推器的第二顶推器,使所述顶推器以及所述拾取器上升第一高度的步骤包括控制所述拾取器对应于所述第一顶推器以及所述第二顶推器中位于上端的顶推器一起上升的步骤。
22.在一实施例中,可以是,使所述顶推器以及所述拾取器上升第一高度的步骤包括:使所述第一顶推器以及所述第二顶推器上升至所述第一高度的中间位置的步骤;以及在将所述第二顶推器在所述中间位置固定的状态下使所述第一顶推器上升的步骤。
23.在一实施例中,可以是,使所述顶推器以及所述拾取器上升第一高度的步骤包括:使所述第一顶推器以及所述第二顶推器上升所述第一高度的步骤;以及在将所述第一顶推器固定的状态下使所述第二顶推器下降至所述第一高度的中间位置的步骤。
24.根据本发明的实施例的半导体焊接设备包括:晶圆台,支承具备单个化的晶粒的晶圆,并选择性地分离所述晶粒;晶粒传送单元,从所述晶圆台传送所述晶粒;晶粒台,被安放通过所述晶粒传送单元传送的所述晶粒并对所述晶粒执行检查;焊接单元,从所述晶粒台拾取所述晶粒并在基板上焊接所述晶粒;以及焊接台,支承所述基板,并将完成焊接的基板向料盒传递。所述晶圆台包括:顶推器,在下方推举附着于切割胶带的所述晶粒;顶推器
控制部,控制所述顶推器的上升或者下降;气体流动部,位于所述顶推器的内侧并形成施加真空压力或者空气压力的气体的流动路径;气流控制部,控制通过所述气体流动部进行的所述真空压力或者所述空气压力;以及胶带吸附部,位于所述顶推器的外侧并使用真空压力吸附所述切割胶带。所述晶粒传送单元包括:拾取器,在上方吸附并传送所述晶粒;以及拾取器控制部,控制所述拾取器的升降驱动。所述拾取器控制部使所述拾取器下降以使所述拾取器接触于所述晶粒的上端,所述气流控制部控制成在所述拾取器下降的期间向下方施加真空压力,在所述拾取器接触于所述晶粒的上端且向下方施加有所述真空压力的状态下,所述顶推器控制部以及所述拾取器控制部使所述顶推器以及所述拾取器上升第一高度,在通过所述气流控制部向下方施加有真空压力的状态下,所述拾取器控制部使所述拾取器上升第二高度,所述气流控制部在所述拾取器从所述顶推器隔开的状态下向上方施加空气压力而使所述晶粒吸附到所述拾取器。
25.根据本发明的实施例,能够在初始,晶粒以与顶推器和拾取器接触的状态从切割胶带剥离,之后在晶粒与拾取器隔开的状态下以非接触方式拾取晶粒,从而能够在防止晶粒损坏的同时执行拾取。
26.本发明的效果不限于以上提及的,本领域技术人员可以从下面的记载明确地理解未提及的其它效果。
附图说明
27.图1示出根据本发明的实施例的焊接设备的概要结构。
28.图2示出根据本发明的实施例的焊接设备中用于传送晶粒的装置的概要结构。
29.图3是根据本发明的一实施例的顶推器的截面图。
30.图4a以及图4b示出根据本发明的实施例的用于传送晶粒的装置的框图。
31.图5示出根据本发明的实施例的用于传送晶粒的过程的一例。
32.图6以及图7示出根据本发明的一实施例的用于传送晶粒的过程。
33.图8是根据本发明的另一实施例的顶推器的截面图。
34.图9以及图10示出根据本发明的另一实施例的用于传送晶粒的过程。
35.图11示出根据本发明的又另一实施例用于传送晶粒的过程。
36.图12是根据本发明的实施例的用于执行用于传送晶粒的方法的流程图。
具体实施方式
37.以下,参照附图来详细说明本发明的实施例,以使得本发明所属技术领域中具有通常知识的人能够容易地实施。本发明可以以各种不同方式实现,不限于在此说明的实施例。
38.为了清楚地说明本发明,省略了与说明无关的部分,贯穿说明书整体对相同或类似的构成要件标注相同的附图标记。
39.另外,在多个实施例中,对具有相同结构的构成要件,使用相同的附图标记来仅说明代表性实施例,在其余的其它实施例中仅说明与代表性实施例不同的结构。
40.在说明书整体中,当表述某部分与其它部分“连接(或者结合)”时,其不仅是“直接连接(或者结合)”的情况,还包括将其它部件置于中间“间接连接(或者结合)”的情况。另
外,当表述某部分“包括”某构成要件时,只要没有特别相反记载,其意指可以还包括其它构成要件而不是排除其它构成要件。
41.只要没有不同地定义,包括技术或科学术语在内在此使用的所有术语具有与本发明所属技术领域中具有通常知识的人一般所理解的含义相同的含义。通常使用的词典中定义的术语之类的术语应解释为具有与相关技术文脉上具有的含义一致的含义,只要在本技术中没有明确定义,不会理想性或过度地解释为形式性含义。
42.图1示出根据本发明的实施例的焊接设备100的概要结构,图2示出根据本发明的实施例的焊接设备100中用于传送晶粒20的装置的概要结构。焊接设备100可以在用于制造半导体封装体的晶粒焊接工艺中为了在基板30(例:pcb,引线架)上焊接晶粒20而使用。
43.根据本发明的实施例的焊接设备100包括:支承具备单个化的晶粒20的晶圆10并将晶粒20选择性地分离的晶圆台110;从晶圆台110传送晶粒20的晶粒传送单元120;安放通过晶粒传送单元120传送的晶粒20而对晶粒20执行检查的晶粒台124;从晶粒台124拾取晶粒20并在基板30上焊接晶粒20的焊接单元130;以及支承基板30并将完成焊接的基板30向料盒42传递的焊接台200。
44.焊接设备100可以通过切割工艺从具备单个化的晶粒20的晶圆10拾取晶粒20而在基板30上焊接晶粒20。晶圆10可以以附着在切割胶带12上的状态提供,切割胶带12可以安装于大致圆环状的安装架14。从装载埠102投放收纳有多个晶圆10的晶圆盒50。晶圆传送单元104从晶圆盒50取出晶圆10并装载在晶圆台110上,晶圆传送单元104可以沿着设置于晶圆盒50和晶圆台110之间的导轨106移动。
45.在晶圆台110上可以配置圆环状的扩张环112,扩张环112可以支承切割胶带12的边缘部位。另外,在晶圆台110上可以配置用于夹持安装架14的夹具114以及通过在切割胶带12被扩张环112支承的状态下使夹具114下降而扩张切割胶带12的夹具驱动部(未图示)。
46.在支承于晶圆台110上的晶圆10的下方可以配置用于选择性地分离晶粒20的顶推单元116。根据本发明的实施例,如图3以及图4a所示那样的顶推单元116包括:在下方推举附着于切割胶带12的晶粒20的顶推器1161;控制顶推器1161的上升或者下降的顶推器控制部1162;位于顶推器1161的内侧并形成用于施加真空压力的气体的流动路径的气体流动部1163;控制成通过气体流动部1163施加真空压力的气流控制部1164;以及位于顶推器1161的外侧而吸附切割胶带12的胶带吸附部1165。而且,气体流动部1163可以形成用于向晶粒20施加空气压力的路径,气流控制部1164可以控制成空气压力通过气体流动部1163施加。
47.参照图3,气体流动部1163位于顶推单元116的中心部而通过抽吸或者排放气体,从而能够对切割胶带12以及晶粒20施加真空压力或者空气压力。虽未图示,气体流动部可以分别连接于用于抽吸气体的抽吸配管以及用于排放气体的排放配管。另外,可以构成对抽吸配管内部的气体流动进行控制的抽吸阀以及对排放配管内部的气体流动进行控制的排放阀,并提供控制抽吸阀的抽吸开关以及控制排放阀的排放开关。气流控制部1164可以通过控制抽吸开关或者排放开关的接通/断开,控制成通过气体流动部1163抽吸气体从而施加真空压力或排放气体从而施加空气压力。
48.另外,设置有将气体流动部1163的周边环绕形成并通过升降驱动推举晶粒20的顶推器1161。顶推器1161可以由具有一定刚性的主体构成,并可以通过线性马达之类驱动部(未图示)上升或者下降。顶推器控制部1162可以通过控制用于顶推器1161的升降驱动的驱
动部而使顶推器上升或者下降。
49.另外,如图3以及图4b所示,晶粒传送单元120包括在上方吸附晶粒20并传送的拾取器121以及控制拾取器121的升降驱动的拾取器控制部122。拾取器121可以为了拾取晶粒20而在外围部形成用于施加真空压力的孔。向拾取器121的外围部施加一定的真空压力,可以通过真空压力将晶粒20吸附于拾取器121。另一方面,拾取器121可以通过升降驱动部升降驱动,并可以通过另外的驱动装置向水平方向移动从而传送晶粒20。提供用于控制拾取器121的升降驱动的拾取器控制部122,可以控制拾取器121的升降驱动以及升降高度。
50.虽未图示,晶圆台110可以构成为通过台驱动部(未图示)能够向水平方向移动,台驱动部可以为了装载以及卸载晶圆10,向与导轨106的端部相邻的晶圆装载/卸载区域(图1中用虚线表示的区域)移动晶圆台110。另外,台驱动部可以为了选择性拾取晶粒20,移动晶圆台110。即,台驱动部可以调节晶圆台110的位置,以使得晶粒20中要拾取的晶粒20位于顶推单元116的上方。
51.通过顶推单元116分离的晶粒20可以通过配置于晶圆台110的上方的晶粒传送单元120拾取。晶粒传送单元120可以拾取晶粒20后向配置于晶圆台110一侧的晶粒台124上传送晶粒20,焊接单元130可以拾取晶粒台124上的晶粒20并焊接到基板30上。为此,拾取器121可以构成为能够向垂直以及水平方向移动。
52.基板30可以从第一料盒40取出而传送到焊接台200上,完成焊接工艺后可以传送并收纳于第二料盒42。焊接设备100可以包括用于向焊接台200上传送基板30的基板传送单元140。例如,基板传送单元140可以包括:用于在第一料盒40、基板台200以及第二料盒42之间引导基板30的导轨142;用于夹持基板30的一侧端部的夹器144;以及用于使夹器144向水平方向(x轴方向)移动的夹器驱动部146。夹器驱动部146可以通过夹器144夹持基板30的一侧端部后移动夹器144而将基板30装载到所述焊接台200上。虽未图示,基板传送单元140可以还包括在完成焊接工艺后用于将基板30移动到第二料盒42的第二夹器(未图示)。
53.焊接设备100可以包括:为了拾取晶粒台124上的晶粒20并焊接到基板30上而使焊接单元130向垂直方向移动的第一头驱动部132;以及在晶粒台124和焊接台200之间使焊接单元130向相对于水平方向垂直的第二水平方向(例:y轴方向)移动的第二头驱动部134。虽未详细图示,焊接单元130可以包括用于利用真空压力拾取晶粒20的焊接工具以及用于加热晶粒20的加热器。即,焊接单元130可以拾取晶粒台124上的晶粒20而焊接到基板30上。另外,焊接单元130也可以从晶圆10拾取晶粒20而直接焊接到基板30上。
54.另一方面,在焊接台200的上方,为了基板30的位置调节,即对齐,可以配置用于拍摄基板30上的基准标记以及要焊接晶粒20的区域的相机。另外,虽未图示,为了晶圆10上的晶粒20的检测、晶粒台124上的晶粒20的检测、通过焊接单元130拾取的晶粒20的检测等,焊接设备100可以包括多个相机。
55.以下,说明根据本发明的实施例的用于拾取晶粒的装置以及方法。随着电子设备的小型化,晶圆10以及晶粒20的厚度也一起变薄。在薄的晶粒20的情况下,当被顶推器1161推举并被拾取器121吸附时可能发生晶粒20损坏。
56.从而,可以使用如下方式:在通过顶推器1161推举晶粒20且拾取器121与晶粒20不接触而隔开一定距离的状态下,使用来自气体流动部1163的空气压力推举晶粒20,以非接触方式拾取晶粒20。
57.参照图5,首先,顶推器1161从最初位置升降而紧贴于晶粒20下方,拾取器121为了拾取晶粒20而位于上方(图5的(a))。之后,拾取器121从晶粒20隔开间隔而停止(图5的(b)),顶推器1161升降一定高度而推举晶粒20,从晶圆1次剥离晶粒20(图5的(c))。在此,在晶粒20和拾取器121之间存在一定的间隔而处于非接触状态,在该状态下,向下方施加真空压力而切割胶带12紧贴于顶推器1161,从而将晶粒20从切割胶带12进行2次剥离((图5的(d))。之后,施加来自上方的空气压力,晶粒20从切割胶带12完全剥离而吸附于拾取器121(图5的(e))。之后,可以是,拾取器121为了传送晶粒20而上升,顶推器1161下降到最初位置(图5的(f))。
58.另一方面,晶粒20变得更薄(小于30um),变薄的晶粒20产生翘曲(warpage)而不能从切割胶带12剥离晶粒20,晶粒20的拾取可能失败。例如,在非常薄的晶粒20的情况下,重量太轻,当产生翘曲时,即使在图5的步骤(d)中向下方施加真空压力,由于晶粒20的漂浮而切割胶带12不能完全紧贴于顶推器1161,可能不能剥离。
59.从而,本发明的实施例提供能够在抑制晶粒20发生损坏的同时成功地拾取晶粒20的装置以及方法。根据本发明的实施例,可以是,初始,在拾取器121下降而接触于晶粒20的状态下,使拾取器121和顶推器1161同时升降,从切割胶带12剥离晶粒20,之后,在使拾取器121升降而与晶粒20非接触的状态下,使用气体的压力,使得通过拾取器121拾取晶粒20。以下,详细说明根据本发明的实施例的用于拾取晶粒的装置以及方法。
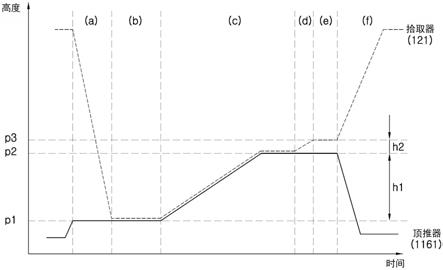
60.图6以及图7示出根据本发明的一实施例的用于拾取晶粒20的过程。图6示出拾取晶粒20时顶推器1161以及拾取器121的位置以及气体的流动方向,图7示出图6的各步骤下的顶推器1161以及拾取器121的高度。
61.根据本发明的实施例,拾取器控制部122使拾取器121下降,以使拾取器121接触于晶粒20的上端。参照图6以及图7的步骤(a),拾取器121为了拾取晶粒20而下降。同时,顶推器1161可以从最初位置升降而紧贴于晶粒20下方。另外,气流控制部1164控制成在拾取器121下降的期间向下方施加真空压力。通过向下方施加真空压力,使得弯曲(warped)的晶粒20平坦地伸直,从而能够预防晶粒20的翘曲引起的拾取失败。
62.在图6以及图7的步骤(b)中,拾取器121接触于晶粒20的上端,拾取器121以接触于晶粒20的状态停止。在此,气流控制部1164可以控制成当拾取器121接触于晶粒20的上端时解除真空压力。
63.之后,如图6以及图7的步骤(c)那样,在拾取器121接触于晶粒20的上端的状态下,顶推器控制部1162以及拾取器控制部122使顶推器1161以及拾取器121上升第一高度h1。在此,气流控制部1164可以控制成在顶推器1161以及拾取器121上升第一高度h1的期间向下方施加真空压力。以晶粒20接触于拾取器121的状态上升,从而能够将晶粒20从切割胶带12进行1次剥离,由于晶粒20以平坦的状态上升,能够在切割胶带12无漂浮的情况下有效地剥离晶粒20。
64.在一实施例中,第一高度h1和第二高度h2可以设定成彼此不同。在此,可以设定成第二高度h2小于第一高度h1。第二高度h2是用于通过空气压力使切割胶带12向上方膨胀而使晶粒20吸附于拾取器121的高度,因此需要将第二高度h2设定成小于第一高度h1,才能够容易地吸附晶粒20。但是,其可以根据用户的意图而不同地设定,也可以根据实施例,设定成第二高度h2大于第一高度h1。
65.之后,如图6以及图7的步骤(d)那样,在通过气流控制部1164向下方施加真空压力的状态下,拾取器控制部122使拾取器121上升第二高度h2。即,使拾取器121从顶推器1161隔开有一定距离。在晶粒20的上升步骤中,当晶粒20从切割胶带12完全剥离时,晶粒20将会吸附于拾取器121。
66.但是,根据情况,晶粒20可能从切割胶带12不完全剥离,因此可能追加使用与非接触方式的拾取相同的方式。如图6以及图7的步骤(e)那样,气流控制部1164在拾取器121从顶推器1161隔开的状态下向上方施加空气压力而使晶粒20吸附于拾取器121。从而,可以使晶粒20从切割胶带12完全分离并使晶粒20吸附于拾取器121。之后,如图6以及图7的步骤(f)那样,可以是,拾取器121上升而传送晶粒20,顶推器1161下降而返回到最初的位置。
67.另一方面,根据本发明的另一实施例,顶推器1161可以提供为多个单位顶推器。即,顶推器1161可以构成为多级。例如,如图8那样,顶推器1161可以包括形成为环绕气体流动部1163的第一顶推器1161a以及形成为环绕第一顶推器1161a的第二顶推器1161b。
68.顶推器控制部1162可以单独控制第一顶推器1161a以及第二顶推器1161b的升降,从而可以使得能够实现顶推器1161的时间上/空间上多级。另一方面,在顶推器1161以单个单位顶推器构成时,也可以使得能够实现时间上多级驱动。
69.在此情况下,拾取器控制部122可以在拾取器121接触于晶粒20的上端而上升的期间,控制拾取器121对应于第一顶推器1161a以及第二顶推器1161b中位于上端的顶推器一起上升。
70.图9以及图10示出根据本发明的另一实施例的用于拾取晶粒20的过程。图9示出拾取晶粒20时顶推器1161以及拾取器121的位置以及气体的流动方向,图10示出图9的各步骤下的顶推器1161以及拾取器121的高度。
71.根据本发明的实施例,拾取器控制部122使拾取器121下降,以使拾取器121接触于晶粒20的上端。参照图9以及图10的步骤(a),拾取器121为了拾取晶粒20而下降。同时,第一顶推器1161a以及第二顶推器1161b可以从最初位置一起上升而紧贴于晶粒20下方。另外,气流控制部1164控制成在拾取器121下降的期间向下方施加真空压力。通过向下方施加真空压力,使得弯曲(warped)的晶粒20平坦地伸直,从而能够预防晶粒20的翘曲引起的拾取失败。
72.在图9以及图10的步骤(b)中,拾取器121接触于晶粒20的上端,拾取器121以接触于晶粒20的状态停止。在此,气流控制部1164可以控制成当拾取器121接触于晶粒20的上端时解除真空压力。
73.之后,如图9以及图10的步骤(c)那样,在拾取器121接触于晶粒20的上端的状态下,顶推器控制部1162以及拾取器控制部122使第一顶推器1161a、第二顶推器1161b以及拾取器121上升至第一高度h1的中间位置。在此,气流控制部1164可以控制成在第一顶推器1161a、第二顶推器1161b以及拾取器121上升至第一高度h1的中间位置的期间向下方施加真空压力。
74.另外,如图9以及图10的步骤(c)那样,可以在将第二顶推器1161b固定在中间位置的状态下使第一顶推器1161a上升。同样地,在此,气流控制部1164可以控制成在第一顶推器1161a以及拾取器121上升的期间向下方施加真空压力。
75.根据本实施例,通过使第一顶推器1161a以及第二顶推器1161b阶段性地上升,能
够使晶粒20从外侧依次从切割胶带12剥离,从而能够更有效地剥离晶粒20。
76.之后,如图9以及图10的步骤(d)那样,在通过气流控制部1164向下方施加真空压力的状态下,拾取器控制部122使拾取器121上升第二高度h2。即,使拾取器121从第一顶推器1161a隔开有一定距离。在拾取器121的上升步骤中,当晶粒20从切割胶带12完全剥离时,晶粒20将会吸附于拾取器121。
77.同样地,如图9以及图10的步骤(e)那样,气流控制部1164在拾取器121从顶推器1161隔开的状态下向上方施加空气压力而使晶粒20吸附于拾取器121。从而,可以使晶粒20从切割胶带12完全分离并使晶粒20吸附于拾取器121。之后,可以是,拾取器121上升而传送晶粒20,顶推器1161下降而返回到最初的位置。
78.另一方面,根据本发明的另一实施例,第一顶推器1161a以及第二顶推器1161b同时上升第一高度h1之后,使得位于外侧的第二顶推器1161b下降,从而能够从切割胶带12将晶粒20从外侧依次剥离。
79.图11示出根据本发明的又另一实施例的用于拾取晶粒20的过程。
80.根据本发明的实施例,拾取器控制部122使拾取器121下降,以使拾取器121接触于晶粒20的上端。参照图11的步骤(a),拾取器121为了拾取晶粒20而下降。同时,第一顶推器1161a以及第二顶推器1161b可以从最初位置一起上升而紧贴于晶粒20下方。另外,气流控制部1164控制成在拾取器121下降的期间向下方施加真空压力。通过向下方施加真空压力,使得弯曲(warped)的晶粒20平坦地伸直,从而能够预防晶粒20的翘曲引起的拾取失败。
81.在图11的步骤(b)中,拾取器121接触于晶粒20的上端,拾取器121以接触于晶粒20的状态停止。在此,气流控制部1164可以控制成当拾取器121接触于晶粒20的上端时解除真空压力。
82.之后,如图11的步骤(c)那样,在拾取器121接触于晶粒20的上端的状态下,顶推器控制部1162以及拾取器控制部122使第一顶推器1161a、第二顶推器1161b以及拾取器121上升第一高度。在此,气流控制部1164可以控制成在第一顶推器1161a、第二顶推器1161b以及拾取器121上升第一高度h1的期间向下方施加真空压力。
83.另外,如图11的步骤(c)那样,可以在将第一顶推器1161a固定的状态下使第二顶推器1161b下降至第一高度h1的中间位置。同样地,在此,气流控制部1164可以控制成在第二顶推器1161b下降的期间向下方施加真空压力。
84.根据本实施例,通过使第一顶推器1161a以及第二顶推器1161b一起上升之后使外侧的第二顶推器1161b下降,能够使晶粒20从外侧依次从切割胶带12剥离,从而能够更有效地剥离晶粒20。
85.之后,如图11的步骤(d)那样,在通过气流控制部1164向下方施加真空压力的状态下,拾取器控制部122使拾取器121上升第二高度h2。即,使拾取器121从第一顶推器1161a隔开有一定距离。在拾取器121的上升步骤中,当晶粒20从切割胶带12完全剥离时,晶粒20将会吸附于拾取器121。
86.同样地,气流控制部1164在拾取器121从第一顶推器1161a隔开的状态下向上方施加空气压力而使晶粒20吸附于拾取器121。从而,可以使晶粒20从切割胶带12完全分离并使晶粒20吸附于拾取器121。之后,可以是,拾取器121上升而传送晶粒20,顶推器1161下降而返回到最初的位置。
87.图12是根据本发明的实施例的用于执行用于传送晶粒20的方法的流程图。图12的各工作可以通过各控制部或者处理器控制并通过焊接设备100的各模组执行。
88.根据本发明的实施例的用于传送晶粒20的方法包括:使得附着在切割胶带12的状态的晶粒20位于顶推器1161的上方的步骤(s1205);使拾取器121下降以使拾取器121接触于晶粒20的上端的步骤(s1210);在拾取器121接触于晶粒20的上端的状态下使顶推器1161以及拾取器121上升第一高度h1的步骤(s1215);在向下方施加有真空压力的状态下使拾取器121上升第二高度h2的步骤(s1220);以及在拾取器121从顶推器1161隔开的状态下向上方施加空气压力而使晶粒20吸附于拾取器121的步骤(s1225)。
89.在一实施例中,使拾取器121下降的步骤(s1210)可以包括在拾取器121下降的期间向下方施加真空压力的步骤。
90.在一实施例中,使拾取器121下降的步骤(s1210)可以包括当拾取器121接触于晶粒20的上端时解除真空压力的步骤。
91.在一实施例中,使顶推器1161以及拾取器121上升的步骤(s1215)可以包括在顶推器1161以及拾取器121上升第一高度h1的期间向下方施加真空压力的步骤。
92.在一实施例中,顶推器1161包括形成为环绕被施加真空压力或者空气压力的气体流动部1163的第一顶推器1161a以及形成为环绕第一顶推器1161a的第二顶推器1161b,使顶推器1161以及拾取器121上升第一高度h1的步骤(s1215)可以包括控制拾取器121对应于第一顶推器1161a以及第二顶推器1161b中位于上端的顶推器一起上升的步骤。
93.使顶推器1161以及拾取器121上升的步骤(s1215)可以包括:使第一顶推器1161a以及第二顶推器1161b上升至第一高度h1的中间位置的步骤;以及在将第二顶推器1161b固定在中间位置的状态下使第一顶推器1161a上升的步骤。
94.使顶推器1161以及拾取器121上升的步骤(s1215)可以包括:使第一顶推器1161a以及第二顶推器1161b上升第一高度h1的步骤;以及在将第一顶推器1161a固定的状态下使第二顶推器1161b下降至第一高度h1的中间位置的步骤。
95.本实施例以及本说明书中所附的附图只不过明确表示包括在本发明中的技术构思的一部分,显而易见由本领域技术人员能够在包括在本发明的说明书以及附图中的技术构思的范围内容易导出的变形例和具体实施例均包括在本发明的权利范围中。
96.因此,本发明的构思不应局限于所说明的实施例,不仅是所附的权利要求书,与其权利要求书等同或等价变形的所有构思属于本发明构思的范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1