一种半导体晶圆DIE分布的获取方法与流程
一种半导体晶圆die分布的获取方法
技术领域
1.本发明涉及一种半导体晶圆die分布的获取方法,属于半导体缺陷检测/光刻技术领域。
背景技术:
2.目前半导体光刻/缺陷检测过程中,需要生成 die 的分布图,用于后续的缺陷检测。
3.现有技术一般是根据晶圆和 die 的尺寸手工创建 die 的分布图,这种方式有如下问题:1、创建 die 的分布比较困难,特别是晶圆上的 die 比较多的情况下(如一片晶圆有几万个甚至更多的 die )。
4.创建的 die 分布与实际情况不符,需要手工进行增加、删除等繁琐的操作。
技术实现要素:
5.本发明所要解决的技术问题是克服现有技术的缺陷,提供一种半导体晶圆die分布的获取方法,它实现了自动扫描晶圆 die 分布图,消除了繁杂的手工创建 die 分布的操作,缩短了晶圆缺陷检测的总体时间。
6.为了解决上述技术问题,本发明的技术方案是:一种半导体晶圆die分布的获取方法,方法的步骤中含有:s01:选取晶圆上某个die作为基测die和将基测die相邻斜角上的die作为邻近die,对晶圆构建坐标系,获取基测die的尺寸及邻近die和基测die之间的间隔尺寸以及获取晶圆的中心坐标;s02:根据晶圆的尺寸、晶圆的中心坐标、基测die的尺寸以及邻近die和基测die之间的间隔尺寸在晶圆上预排列出 die的分布,并获得每个预排列的die的位置坐标和得到die预排列图;s03:在die中指定多个特征模板,并获取特征模板相对于die的位置坐标;其中,特征模板为die中的某一区域;s04:根据获得的预排列的die的位置坐标及特征模板相对于die中的位置坐标设定扫描路径对晶圆进行光学扫描;其中,扫描晶圆的过程中,每个die对应扫描该die上特征模板位置对应的特征图像;s05:对光学扫描得到的特征图像和相应特征模板进行匹配,根据每个die匹配的特征模板的个数判断对应的die是否存在,并将不存在的die剔除出die预排列图,得最终die分布图。
7.进一步,在步骤s01中,通过光学扫描设备定位到晶圆上选取的基测die,采集基测die和邻近die的图像,分别获取基测die的左上角、右下角、相邻die靠基测die的角部的坐标,计算得到基测die的尺寸及邻近die和基测die之间的间隔尺寸。
8.进一步,获取晶圆的中心坐标的方法为:通过光学扫描设备获取晶圆的图像,从晶圆的图像中获取晶圆边缘的切线,根据切线和切点的坐标,计算得出晶圆的中心坐标。
9.进一步,在步骤s03中,在die中指定的特征模板的图案分别不同。
10.进一步,在步骤s05中,对光学扫描得到的特征图像和相应特征模板进行匹配具体为:设定匹配阈值,对光学扫描得到的特征图像和相应特征模板进行匹配,在每个die中,匹配结果大于匹配阈值,则匹配成功,否则匹配失败,不计入每个die匹配的特征模板的个数。
11.进一步,在步骤s05中,设定个数阈值, 每个die中匹配的特征模板≥设定的个数阈值时,则相应die存在,反之则相应die不存在。
12.采用了上述技术方案后,通过本发明的获取方法,并借助光学扫描设备可高效快速准确的生成 die 的分布,极大提高了操作的自动化。
附图说明
13.图1为本发明的光学扫描设备的控制原理图;图2为本发明的die预排列图;图3为本发明获取基测die的左上角、右下角、相邻die靠基测die的角部的坐标的示意图;图4为本发明的获取晶圆的中心坐标的示意图;图5为本发明预排列出 die的分布的过程图一;图6为本发明预排列出 die的分布的过程图二;图7为本发明的指定的特征模板的示意图;图8为本发明的光学扫描设备的扫描路径图;图9为本发明的最终die分布图。
具体实施方式
14.为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明。
15.一种半导体晶圆die分布的获取方法,方法的步骤中含有:s01:选取晶圆上某个die作为基测die和将基测die相邻斜角上的die作为邻近die,对晶圆构建坐标系,获取基测die的尺寸及邻近die和基测die之间的间隔尺寸以及获取晶圆的中心坐标;s02:根据晶圆的尺寸、晶圆的中心坐标、基测die的尺寸以及邻近die和基测die之间的间隔尺寸在晶圆上预排列出 die的分布,并获得每个预排列的die的位置坐标和得到die预排列图;具体参见图5和图6;s03:在die中指定多个特征模板,并获取特征模板相对于die的位置坐标;其中,特征模板为die中的某一区域;s04:根据获得的预排列的die的位置坐标及特征模板相对于die中的位置坐标设定扫描路径对晶圆进行光学扫描,具体扫描路径可采用蛇形扫描,具体见图8;其中,扫描晶
圆的过程中,每个die对应只需扫描该die上特征模板位置对应的特征图像,不需要对无关部分(不包含特征模板的部分)进行扫描;s05:对光学扫描得到的特征图像和相应特征模板进行匹配,根据每个die匹配的特征模板的个数判断对应的die是否存在,并将不存在的die剔除出die预排列图,得最终die分布图,具体见图9。
16.具体地,在步骤s01中,通过光学扫描设备定位到晶圆上选取的基测die,采集基测die和邻近die的图像,分别获取基测die的左上角、右下角、相邻die靠基测die的角部的坐标,计算得到基测die的尺寸及邻近die和基测die之间的间隔尺寸;具体如图3所示,基测die的左上角为图3中标记的a、基测die的右下角为图3中标记的b,相邻die靠基测die的角部的坐标具体为相邻die的左上角的坐标,相邻die的左上角具体为图3中标记的c。
17.具体地,获取晶圆的中心坐标的方法为:通过光学扫描设备获取晶圆的图像,从晶圆的图像中获取晶圆边缘的切线,根据切线和切点的坐标,计算得出晶圆的中心坐标,具体参见图4。
18.在本实施例中,在步骤s03中,在die中指定的特征模板的图案分别不同;特征模板是 die 中具有唯一性的图案,可以指定任意个数的特征模板,图7 中给出了左上、右上、左下、右下 4 个特征模板的例子。
19.在步骤s05中,对光学扫描得到的特征图像和相应特征模板进行匹配具体为:设定匹配阈值,对光学扫描得到的特征图像和相应特征模板进行匹配,在每个die中,匹配结果大于匹配阈值,则匹配成功,否则匹配失败,不计入每个die匹配的特征模板的个数。
20.在步骤s05中,设定个数阈值, 每个die中匹配的特征模板≥设定的个数阈值时,则相应die存在,反之则相应die不存在。
21.在本实施例中,光学扫描设备具体可以采用下面的结构形式:如图1所示,光学扫描设备包括控制模块5、定位模块、同步模块6、采集模块和聚焦模块8;其中,定位模块包括运动平台1和平台控制器7,采集模块包括光路系统3和相机4;控制模块5完成定位模块的控制、图像的采集和缺陷的检测,控制模块5中可插入多块gpu计算卡,用于对大量数据进行实时处理。
22.运动平台1包括同步轴x,步进轴y和垂直轴z,平台控制器7控制各轴的移动并将步进轴y 在移动时生成的位置脉冲向外输出。同步模块6接收平台控制器7输出的位置脉冲,并将位置脉冲发送给相机4,相机收到位置脉冲后,触发拍照并将图像发送到控制模块5。控制模块5负责控制同步模块6、平台控制器7和聚焦模块8的动作。
23.光路系统3包含5x、10x、20x、50x、100x的镜头,采用不同的镜头可以检测出不同分辨率的缺陷。相机4收到同步模块6发送的位置脉冲后,采集待测物体2(本实施例中为晶圆)在光路系统3在镜头的视场中的图像,并将图像发送到控制模块5进行处理。
24.聚焦模块8用于在运动平台1的同步轴x的运动过程中,实时检测并调整运动平台1的垂直轴z的高度,使待测物体2(本实施例中为晶圆)一直保持在相机4的焦面上,使得相机4能够采集到待测物体2(本实施例中为晶圆)的清晰的图像。
25.在本实施例中,在控制模块5中,输入计算晶圆 die 分布的相关参数,相关参数包括晶圆的尺寸(2、4、5、6、8、12寸等)、运动平台运动速度等级和聚焦模块焦面参数。调整光
路系统镜头,采用相应倍率的镜头,然后启动自动扫描任务。控制模块5向平台控制器7发送运动轨迹、运动速度、位置脉冲参数。
26.运动平台1在收到控制模块5发送的运动轨迹、平台运动速度、位置脉冲参数后,开始沿指定的运动轨迹匀速运动,到达位置脉冲间隔后,向同步模块6发送位置脉冲。
27.聚焦模块8收到控制模块5发送的焦面参数后,检测聚焦模块8与运动平台1的z轴的距离是否偏离了焦面,如发生偏离,聚焦模块8向平台控制器7发送调整z轴距离命令,平台控制器7收到调整z轴距离命令后,调整z轴到焦面位置,保证相机4能够拍摄到清晰的图像。
28.相机4收到同步模块6发送的位置脉冲后,将待测物体2(本实施例中为晶圆)经由光路系统3的镜头的视场进行成像,将采集到的图像发送给控制模块5进行 die 分布扫描。
29.控制模块5收到相机4发送的图像后,将收到图像与采集到的 die 的模板进行匹配,随着扫描和步进的进行,控制模块5扫描出整个晶圆区域的 die 的分布。
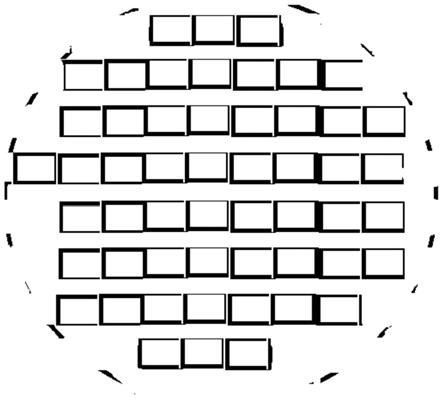
30.晶圆 die 分布示意图参见图2。
31.以上所述的具体实施例,对本发明解决的技术问题、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1