一种三维六方向的机械惯性电学开关的制作方法
1.本发明涉及惯性开关领域,尤其涉及一种三维六方向的机械惯性电学开关。
背景技术:
2.以微机电技术为基础的惯性开关具有体积小、重量轻、成本低和易集成等优点,目前广泛应用于民用汽车,军用导弹、火箭等领域。目前机械惯性开关中触发型开关应用较广泛,当安装有惯性开关的本体受到冲击时,惯性开关的质量块因为惯性力的作用产生与冲击加速度方向相反的位移,当加速度大小达到惯性开关阀值后,质量块就会与固定电极接触,完成开关的通断。
3.但是目前机械惯性开关通常只能实现单向、双向或者单一平面内的几个方向加速度感应,当需要同时检测水平和垂直方向上的加速度作用时,单一的机械惯性开关就难以实现,通常需要联合几个惯性开关使用,使用起来不经济也不便利。公开的中国发明专利三维多方向敏感的微机械惯性电学开关(申请号cn201010127247.1)和一种微机械万向碰撞开关(申请号cn201210198176.3)均提供了一种三维多向的惯性开关方案,但是两个专利均是采用蛇形弹簧来实现水平和竖直方向的支撑和往复移动,该方案中质量块在水平面上几个方向移动是在线弹性方向压缩或拉伸弹簧,但是在竖直方向上移动是垂直于弹簧的线弹性方向拉伸或压缩弹簧,该方式存在如下缺陷:一是弹簧在垂直于线弹性方向提供的弹力有限,很容易被拉坏;另一个是弹簧在垂直于线弹性方向提供的弹力不稳定,给标定惯性开关在垂直方向上的阈值带来了难度,而且量产后弹力稳定性较差,导致惯性开关在垂直方向上实际阈值一致性差。部分公开文献中提供一些方式,限定了弹簧非线性方向的受力,但多为单方向的封闭结构,无法实现多方向的加速度感应。
技术实现要素:
4.为解决上述机械惯性开关现有技术上存在的不足,本发明提供一种三维六方向的机械惯性电学开关,主要通过弹簧的线性受力可以同时灵敏的感应来自水平和垂直三维六个方向的加速度冲击作用。
5.本发明是通过以下技术方案实现:
6.一种三维六方向的机械惯性电学开关,包括如下机构:
7.绝缘衬底;
8.固定设置在绝缘衬底上的固定电极;
9.活动设置能够在惯性作用下至少发生水平或竖直位移的惯性块;
10.活动电极,所述活动电极一端固定在绝缘衬底上,另一端能够在惯性块作用下发生线性运动与固定电极接触并连通;
11.所述活动电极和固定电极分别对应成组设置,至少包括位于竖直方向上的一组,位于水平方向且相互之间互相垂直的两组。
12.优选地是,所述惯性块包括环形质量块,所述环形质量块呈倒扣的碗状设置在所
述绝缘衬底上,所述环形质量块的竖直边缘均匀分布有至少四个竖直贯通滑槽,所述竖直贯通滑槽为沿竖直方向延伸的腰型槽,所述环形质量块顶部为平面并设置有四个等间距分布的+型贯通滑槽,所述竖直贯通滑槽内设置有水平移动系统,所述+型贯通滑槽内设置有竖直移动系统。
13.优选地是,所述水平移动系统包括固定设置在绝缘衬底中心的水平弹簧安装底座,所述环形质量块扣合在水平弹簧安装底座上,所述水平弹簧安装底座侧边设置与所述竖直贯通滑槽对应的水平活动电极滑块,所述水平活动电极滑块通过水平弹簧与所述水平弹簧安装底座固定连接,所述水平活动电极滑块在弹簧作用下在所述竖直贯通滑槽内发生位移不会脱出,所述绝缘衬底边缘固定设置至少四个与所述水平活动电极滑块位置一一对应的水平固定电极。
14.优选地是,所述水平活动电极滑块包括位于所述竖直贯通滑槽内的水平滑块,所述水平滑块位于所述竖直贯通滑槽两侧分别有前挡板和后挡板。
15.优选地是,所述竖直移动系统包括竖直活动块,所述竖直活动块放置在所述+型贯通滑槽中并在所述+型贯通滑槽发生位移不会脱出,所述竖直活动块下端通过竖直弹簧与所述绝缘衬底固定连接;所述竖直活动块顶端设置竖直电极安装架,所述竖直电极安装架中部设置垂直上电极,所述垂直上电极下方对应位置固定设置垂直下电极。
16.优选地是,所述竖直活动块包括位于所述+型贯通滑槽内的竖直滑块,所述竖直滑块上下两端位于所述+型贯通滑槽外侧分别设置上挡板和下挡板。
17.优选地是,所述竖直活动块中心设置竖直圆滑道,所述竖直圆滑道内设置导向杆,所述导向杆固定设置在所述绝缘衬底上。
18.优选地是,所述绝缘衬底为圆形平板结构。
19.优选地是,所述惯性块为均匀回转体结构。
20.优选地是,所述活动电极和固定电极均设置有弹性触点。
21.本发明为纯机械结构,结构简单可靠,可以同时灵敏的感应来自水平和垂直三维六个方向的加速度冲击作用,而且结构中的弹簧受力都是主要沿着线性方向,使得出厂时标定惯性阈值简便可靠,弹簧可靠性高。
附图说明
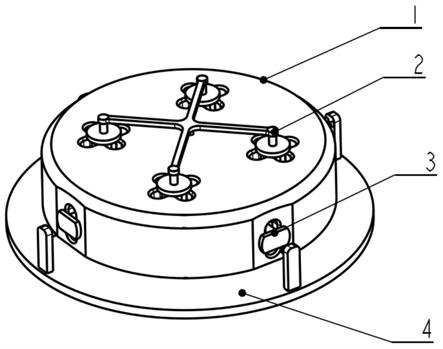
22.图1为本发明中一种三维六方向的机械惯性电学开关优选实施例结构示意图;
23.图2为本发明中一种三维六方向的机械惯性电学开关优选实施例中环形质量块结构示意图;
24.图3为本发明中一种三维六方向的机械惯性电学开关优选实施例中竖直移动系统结构示意图;
25.图4为本发明中一种三维六方向的机械惯性电学开关优选实施例中水平移动系统结构示意图;
26.图5为本发明中一种三维六方向的机械惯性电学开关优选实施例中水平活动电极滑块结构示意图;
27.图6为本发明中一种三维六方向的机械惯性电学开关优选实施例中竖直活动块结构示意图。
28.附图标记如下:
29.1、环形质量块,11、+型贯通滑槽,12、竖直贯通滑槽;2、竖直移动系统,21、垂直上电极,22、垂直下电极,23、竖直弹簧,24、竖直电极安装架,25、竖直活动块,251、上挡板,252、竖直滑块,253、下挡板,254、竖直弹簧安装顶座,255、竖直圆滑道,26、竖直弹簧安装底座,3、水平移动系统,31、水平活动电极滑块,311、前挡板,312、水平滑块,313、后挡板,314、弹簧安装座,32、水平固定电极,33、水平弹簧,34、水平弹簧安装底座,4、绝缘衬底。
具体实施方式
30.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
31.下面结合附图对本发明的具体实施方式作进一步说明。
32.本发明的一种优选实施例中,一种三维六方向的机械惯性电学开关,可以同时灵敏的感应来自水平和垂直三维六个方向的加速度冲击作用,主要包括:
33.绝缘衬底4,一般优选为圆形平板结构;
34.固定设置在绝缘衬底4上的固定电极;
35.活动设置能够在惯性作用下至少发生水平或竖直位移的惯性块,惯性块一般选用回转体结构,在安装前要最好进行动平衡试验;
36.活动电极,活动电极一端固定在绝缘衬底4上,另一端能够在惯性块作用下发生线性运动与固定电极接触并连通;
37.所述活动电极和固定电极分别对应成组设置,至少包括位于竖直方向上的一组,位于水平方向且相互之间互相垂直的两组;
38.参见图1至图6,本实施例中选用三组电极,包括设置在竖直方向的垂直上电极21和垂直下电极22,设置水平方向上的水平活动电极滑块31和水平固定电极32为例进行详细阐述。
39.本发明的一种优选实施例中,如图2所示,惯性块一般选用环形质量块1,最好选用导电性能好且抗冲击磨损能力强的合金块,环形质量块1呈倒扣的碗状设置在绝缘衬底4上,环形质量块1的竖直边缘均匀分布有四个竖直贯通滑槽12,竖直贯通滑槽12为呈沿竖直方向延伸的腰型槽,环形质量块1顶部为平面并设置有四个等间距分布的+型贯通滑槽11,竖直贯通滑槽12内设置有水平移动系统3,+型贯通滑槽11内设置有竖直移动系统2。
40.本发明的一种优选实施例中,如图4所示,水平移动系统3包括固定设置在绝缘衬底4中心的水平弹簧33安装底座,环形质量块1扣合在水平弹簧33安装底座上,水平弹簧33安装底座侧边设置与竖直贯通滑槽12对应的水平活动电极滑块31,水平活动电极滑块31通过水平弹簧33与水平弹簧安装底座34固定连接,水平弹簧33与水平活动电极滑块31连接处设置弹簧安装座314,弹簧安装座314及水平弹簧安装底座34可以保证弹簧安装的稳定性;水平活动电极滑块31包括位于竖直贯通滑槽12内的水平滑块312,如图5所示,水平滑块312截面为大圆角矩形,水平滑块312位于竖直贯通滑槽12两侧分别有前挡板311和后挡板313,因此水平滑块312只能在竖直贯通滑槽12中上下滑动,其他维度移动均被限位,绝缘衬底4边缘固定设置四个水平固定电极32,水平固定电极32位置正对水平活动电极滑块31,每一
个水平活动电极滑块31对应一个水平固定电极32。每一个水平活动电极滑块31对应一个水平固定电极32。当发生水平惯性移动时,环形质量块1移动带动水平活动电极滑块31与水平固定电极32接触连通。
41.本发明的一种优选实施例中,如图3所示,竖直移动系统2包括竖直活动块25,竖直活动块25放置在+型贯通滑槽11中,可以在+型贯通滑槽11内做两个方向的滑移以及竖直方向的位移,竖直活动块25包括位于+型贯通滑槽11内的竖直滑块252,如图6所示,竖直滑块252横截面为圆形,竖直滑块252上下两端位于+型贯通滑槽11外侧分别设置上挡板251和下挡板253,使得竖直滑块252在+型贯通滑槽11只能在水平方向沿+发生位移时,其他维度均被限位;竖直活动块25下端设置竖直弹簧安装顶座254连接竖直弹簧23,竖直弹簧23通过竖直弹簧安装底座26与绝缘衬底4固定连接;竖直活动块25顶端设置竖直电极安装架24,竖直电极安装架24中部设置垂直上电极21,垂直上电极21下方对应位置固定设置垂直下电极22;本实施例中,由于水平移动系统3和竖直移动系统2是交叉设置的,因此垂直下电极22设置在水平弹簧33安装底座的顶部,垂直上电极21通过竖直电极安装架24以及竖直活动块25与导电的环形质量块1连通,使得整个环形质量块1形成竖直方向上的活动电极,当发生竖直惯性移动时,环形质量块1向下移动接触垂直下电极22即触发竖直方形惯性开关。
42.本发明的一种优选实施例中,如图6所示,竖直活动块25中心设置竖直圆滑道255,竖直圆滑道255内设置导向杆,导向杆固定设置在绝缘衬底4上,另一端可以直接与竖直电极安装架24连接。导向杆可以进一步限定竖直活动块25,防止发生水平惯性位移时,竖直弹簧23发生非线性的变形。水平移动系统3中也可以设置相同原理的导向杆。
43.本发明的一种优选实施例中,所述活动电极和固定电极均设置有弹性触点,弹性触点可以避免刚性触点长期使用产生的磨损。
44.当搭载上述实施例的惯性体受到沿绝缘衬底4上表面法线方向向上或向下的冲击时,环形质量块1受到惯性力的作用产生沿绝缘衬底4上表面法线方向上、下移动,因为竖直滑块252放置在环形质量块1的+型贯通滑槽11中,环形质量块1就会带着竖直滑块252上、下移动,环形质量块1上、下移动时就会拉伸或压缩竖直弹簧23。在环形质量块1上、下移动的过程中,水平活动电极滑块31在竖直贯通滑槽12中上下滑动,滑动阻力非常小,可以忽略不计。在标定沿绝缘衬底4上表面法线方向向上或向下的惯性力阈值时只需标定竖直弹簧23即可,因为竖直弹簧23都是沿线弹性方向移动,受力也是线性的,因此标定阈值非常简单、可靠。
45.当搭载本发明机械惯性电学开关的本体受到沿绝缘衬底4上表面水平方向前、后、左、右的冲击时,环形质量块1受到惯性力的作用产生沿绝缘衬底4上表面水平方向前、后、左、右移动,因为水平活动电极滑块31在竖直贯通滑槽12中,环形质量块1就会带着水平活动电极滑块31前、后、左、右移动,环形质量块1前、后、左、右移动时就会拉伸或压缩水平弹簧33。在环形质量块1前、后、左、右移动的过程中,竖直滑块252在环形质量块1的+型贯通滑槽11中沿着滑槽前、后、左、右滑动,滑动阻力非常小,可以忽略不计。本发明机械惯性电学开关在标定沿绝缘衬底4上表面水平方向前、后、左、右的惯性力阈值时只需标定水平弹簧33即可,而且前、后、左、右任何一个方向移动时,沿移动方向上的两个弹簧被线性压缩和拉伸,虽然与移动方向垂直布置的两个弹簧会被斜向拉伸,但是通过简单的三角函数换算也可标定,该种结构避免了所有弹簧都被斜向拉伸,避免弹簧损坏。
46.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1