连接装置、连接元件以及电子设备的制作方法
1.本发明涉及一种用于连接电导体的连接装置。此外,本发明涉及一种具有这种连接装置的连接元件以及一种电子设备。
背景技术:
2.用于连接电导体的连接装置通常具有电流条以及用于将待连接的导体夹紧在电流条上的夹紧弹簧。夹紧弹簧通常构造为螺旋扭力弹簧,该螺旋扭力弹簧具有位置固定地支承的保持腿和相对于保持腿可摆动地布置的夹紧腿。夹紧腿可以通过摆动运动转移到打开位置和夹紧位置,其中,在打开位置,导体可以插入夹紧弹簧的夹紧腿和电流条之间的导体连接室中并且从该导体连接室中引出,并且其中,在夹紧腿的夹紧位置,插入导体连接室的导体相对于电流条夹紧。
技术实现要素:
3.本发明的目的在于,提供一种连接装置、一种连接元件以及一种电子设备,其特征在于在尽可能紧凑的结构的同时可靠地连接导体。
4.根据本发明,该目的通过独立权利要求的特征来实现。本发明的有利的设计方案和有利的改进方案在从属权利要求中给出。
5.根据本发明的连接装置具有电流条和用于将待连接的导体夹紧在电流条上的夹紧弹簧,其中夹紧弹簧具有可转移到打开位置和夹紧位置的夹紧腿和保持腿,其中夹紧腿将待连接的导体夹紧在电流条的下侧上,并且其中保持腿具有第一腿区段,该第一腿区段弯曲地构造并且在形成线接触的情况下支撑在电流条的与下侧对置的上侧上。
6.根据本发明,夹紧弹簧以其保持腿至少局部地支撑和支承在电流条上。夹紧弹簧至少通过保持腿的第一腿区段支撑在电流条的上侧上,并且待连接的导体借助夹紧弹簧的夹紧腿夹紧在与上侧对置的下侧上,从而构成自稳定的系统,该系统能够实现待连接的导体的可靠和稳定的夹紧。第一腿区段弯曲地构造,保持腿利用该第一腿区段放置或支撑在电流条的上侧上。因此,保持腿的第一腿区段恰好不是笔直或平坦地构造,并且也不是整面地放置在电流条的上侧上。相反,通过弯曲的形状,第一腿区段仅以比第一腿区段的总面积小的第一腿区段的子面贴靠在电流条的上侧上。第一腿区段的其余部分优选地与电流条间隔布置,特别是与电流条的上侧间隔布置。在第一腿区段与电流条的上侧贴靠的位置处,在电流条与第一腿区段之间构造线接触,这意味着,第一腿区段线形地并且因此沿着优选窄的线贴靠在电流条上。线接触优选沿着电流条的宽度或沿着第一腿区段的宽度延伸并且因此横向于电流条的长度或横向于第一腿区段的长度延伸。因此,该线接触需要非常小的面积,使得连接装置可以更紧凑地构造。在电流条上也可以设置两个这种夹紧弹簧,从而可以连接两个导体。
7.优选地,第一腿区段s形弯曲地构造。第一腿区段通过s形具有足够的稳定性。在s形腿区段的指向电流条方向的弯曲部的区域内,第一腿区段优选与电流条构成线接触。第
一腿区段通过s形具有两个沿着第一腿区段的长度彼此间隔开地构造的弯曲部,其中两个弯曲部中的一个贴靠在电流条上,以便构造线接触,并且两个弯曲部中的另一个与电流条,尤其是与电流条的上侧尽可能远地间隔开。
8.保持腿优选被分成多个腿区段,其中,这些腿区段可分别彼此成角度地取向。优选地,除了第一腿区段之外,保持腿还具有第二腿区段和第三腿区段,其中第二腿区段可以布置在第一腿区段与第三腿区段之间,并且其中第三腿区段可以布置在第二腿区段与夹紧腿之间。因此,第一腿区段能够构成保持腿的、以及因此夹紧弹簧的自由端部区段,因为第一腿区段借助其两个端部中的一个连接到第二腿区段上并且在两个端部中的另一个上是自由的。通过具有保持腿的三个腿区段和夹紧腿的这种夹紧弹簧的设计方案,夹紧弹簧能够具有环形形状(schlaufenform)。第二腿区段可以基本上垂直于第三腿区段取向。第一腿区段可以利用弯曲部成形在第二腿区段上,其中,该弯曲部可以这样设计,即第一腿区段可以朝夹紧弹簧的夹紧腿的方向弯曲。夹紧腿可以通过弧形区段连接在第三腿区段上。通过这种设计方案,夹紧弹簧可以大致构成三角形。夹紧弹簧可以通过该造型而构成为自支撑的。
9.优选地,第一腿区段可以弯曲地构造并且连接到第二腿区段,使得第一腿区段从第二腿区段开始首先延伸超过电流条的上侧,并且在进一步的走向中朝向电流条的上侧的方向弯曲。因此,第一腿区段能够直接与第一腿区段在第二腿区段上的连接处相邻地与电流条间隔开地延伸。然后,在第一腿区段的沿着第一腿区段的长度远离在第二腿区段上的连接处的走向中才实现第一腿区段与电流条的接触,更确切地说是线接触。因此,第一腿区段和电流条之间的线接触优选与第一腿区段在第二腿区段上的连接处或连接部位间隔地构造。
10.夹紧弹簧可以挂在电流条上。为了实现这一点,第二腿区段能够具有开口,电流条能够引导穿过所述开口。开口例如可以以窗形开口的形式构造在第二腿区段中,从而开口可以全面地被包围。在开口的区域中,夹紧弹簧因此可以放置于电流条上,特别是放置于电流条的上侧上。
11.为了能够实现夹紧弹簧在电流条上布置的高稳定性,该第二腿区段可以具有止动钩,该止动钩可以伸入该开口中并且可以通过其端棱支撑在电流条上。止动钩优选横向于电流条的纵向延伸,从而止动钩以直角与电流条相汇并支撑。止动钩支撑在电流条的上侧上。止动钩的端棱优选直线地构造,从而止动钩可以以其端棱面状地贴靠在电流条上。
12.此外,连接装置优选地具有用于操纵夹紧弹簧的夹紧腿的操纵元件,其中,操纵元件可以具有第一操纵腿和与第一操纵腿间隔地布置的第二操纵腿,其中,在第一操纵腿和第二操纵腿之间可以构造有自由空间,夹紧弹簧的第一腿区段可以布置在该自由空间中。这两个操纵腿优选彼此平行地延伸。这两个操纵腿可以直接压到夹紧弹簧的夹紧腿上,以便操纵夹紧弹簧。通过在两个操纵腿之间的自由空间和保持腿的第一腿区段在该自由空间中的布置,可以实现夹紧弹簧和操纵元件布置的特别紧凑的设计方案。
13.在第一操纵腿上可以构造第一滑动面,并且在第二操纵腿上可以构造第二滑动面,其中,两个操纵腿利用第一滑动面和第二滑动面贴靠在夹紧弹簧的第二腿区段上,并且在操纵夹紧腿时可以沿着滑动。由此,在紧凑的设计方案的同时实现操纵元件在夹紧弹簧上的可靠的引导。这两个滑动面优选平行于夹紧弹簧的第二腿区段的纵向延伸,从而这两个操纵腿能够以其滑动面沿着第二腿区段的长度滑动并且因此被引导。通过操纵腿以及因
此操纵元件在保持腿的第二腿区段上的直接贴靠,导体连接室(导体被插入和夹紧在其中)尤其可以侧向限定或封闭,从而可以防止导体从导体连接室侧向偏移。这两个操纵腿优选横向于保持腿的第二腿区段延伸。这两个滑动面优选构造在两个操纵腿的指向第二腿区段方向的棱边面上。
14.操纵元件还可以具有用于插入待连接导体的导体插入井,其中导体插入井可以分别通过第一操纵腿和第二操纵腿侧向限定。操纵元件的操纵腿因此可以在导体插入导体连接室时就已经对其侧向引导,从而在此已经可以防止导体侧向偏移。
15.操纵元件优选可线性运动地引导。操纵元件的操纵方向优选横向于导体插入导体连接室的插入方向构造。
16.此外,根据本发明的目的的解决方案借助于一种连接元件来实现,该连接元件具有壳体,在该壳体中可以布置如前所述地构造和改进的连接装置。连接元件例如可以是连接端子,如接线盒(reihenklemme)或电路板连接端子。
17.此外,根据本发明的目的的解决方案借助一种电子设备来实现,该电子设备具有至少一个如前所述构造和改进的连接装置和/或至少一个如前所述构造和改进的连接元件。
附图说明
18.下面参照附图根据优选的实施方式详细阐述本发明。其中,
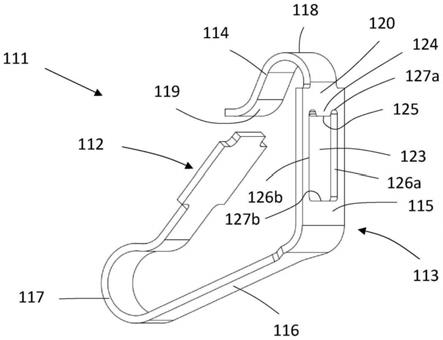
19.图1示出了根据本发明的连接装置的夹紧弹簧的示意图,
20.图2示出了根据本发明的连接装置的示意性剖视图,
21.图3示出了根据本发明的连接元件的示意性剖视图,以及
22.图4示出了根据本发明的连接装置的示意图,该连接装置具有两个布置在电流条上的夹紧弹簧和两个操纵元件。
具体实施方式
23.图1示出了一个夹紧弹簧111,借助于该夹紧弹簧可以将待连接的电导体夹紧在电流条110上并由此连接,例如图2中所示。
24.夹紧弹簧111是冲压弯曲件。夹紧弹簧111具有夹紧腿112和保持腿113。保持腿113位置固定地设置,而夹紧腿112可相对保持腿113偏转,从而夹紧腿112可以转移到打开位置和夹紧位置。
25.保持腿113在此具有三个腿区段,即第一腿区段114、第二腿区段115和第三腿区段116。第一腿区段114形成夹紧弹簧111的自由端部。第二腿区段115设置在第一腿区段114和第三腿区段116之间。第三腿区段116设置在第二腿区段115和夹紧腿112之间。夹紧腿112通过弧形区段117连接到第三腿区段116上并且由此连接到保持腿113上。
26.这些腿区段114、115、116分别相互成角度地构造。第二腿区段115与第三腿区段116成大约90
°
的角度地取向。夹紧弹簧111以其夹紧腿112和其保持腿113这样弯曲,使得夹紧弹簧111在从夹紧弹簧111的初始位置侧面观察的俯视图中(如图1所示)具有三角形形状。
27.第二腿区段115和第三腿区段116分别构造成直线。相反,第一腿区段114不是直线
地构造,而是第一腿区段114弯曲地构造。第一腿区段114在此s形弯曲地构造。
28.通过第一腿区段114的这种s形弯曲,该第一腿区段具有第一弯曲部118和第二弯曲部119。第一弯曲部118比第二弯曲部119更靠近第一腿区段114与第二腿区段115的连接部位120地构造。第一弯曲部118在此直接连接到连接部位120上。
29.如在图2中可以看到的,第一腿区段114通过第二弯曲部119贴靠在电流条110的上侧121上,使得第一腿区段114通过其第二弯曲部119支撑在电流条110上。第一腿区段114在此以其第二弯曲部119这样支撑在电流条110的上侧121上,使得在第一腿区段114和电流条110之间构成线接触。线接触在电流条110的宽度和第一腿区段114的宽度上延伸,从而线接触横向于电流条110的纵向延伸并且横向于第一腿区段114的纵向延伸地构造。在第二弯曲部119的区域中,第一腿区段114与电流条110的唯一的接触部位以线接触的形式构造。
30.在第一腿区段114的第二弯曲部119的区域中,第一腿区段114具有到电流条110、尤其到电流条110的上侧121的尽可能大的间距。因此,第一腿区段114这样弯曲地构造并且连接在第二腿区段115上,使得第一腿区段114从第二腿区段115出发首先延伸超过电流条110的上侧121并且在进一步的走向中朝电流条110的上侧121的方向弯曲地构造。
31.在电流条110的与上侧121对置的下侧122上借助夹紧弹簧111的夹紧腿112实现待连接的导体的夹紧。
32.第二腿区段115具有窗形开口123,电流条110引导穿过该窗形开口。夹紧弹簧111由此悬挂在电流条110上。在开口123的区域中,第二腿区段115具有止动钩124,该止动钩延伸到开口123中并且以其端棱125置于电流条110的上侧121上并且由此支撑在电流条110上。端棱125直线地构造,从而端棱125在其整个长度上贴靠在电流条110的上侧121上。止动钩124在第二腿区段115的纵向方向上延伸,使得止动钩124横向于电流条110的纵向延伸而延伸。
33.开口123通过第二腿区段115的两个彼此平行延伸的纵向棱边面126a、126b和两个彼此平行延伸的横向棱边面127a、127b限定,所述纵向棱边面沿第二腿区段115的纵向方向延伸,所述横向棱边面横向于第二腿区段115的纵向方向延伸。在横向棱边面127a处构造有止动钩124并且止动钩124从横向棱边面127a出发延伸到开口123中。
34.图2示出了连接装置100的截面。该连接装置除了电流条110和夹紧弹簧111以外还具有操纵元件128。操纵元件128能沿着操纵方向b线性运动,以便将夹紧弹簧111的夹紧腿112转移到打开位置和夹紧位置。
35.图2示出了处于打开位置的夹紧腿112,在打开位置,夹紧腿112与电流条110的下侧122间隔开,并因此释放导体连接室129,以便能将待连接的导体引入到在夹紧弹簧111的夹紧腿112和电流条110之间的该导体连接室129中。
36.如尤其在图4中也可看到的,操纵元件128具有两个彼此平行延伸的操纵腿130a、130b。两个操纵腿130a、130b贴靠在夹紧弹簧111的夹紧腿112上,以便操纵该夹紧腿。两个操纵腿130a、130b分别在侧面延伸经过电流条110。
37.在两个操纵腿130a、130b之间形成自由空间131,保持腿112的第一腿区段114定位在该自由空间中。
38.在两个操纵腿130a、130b上分别构造有滑动面132a、132b,借助于该滑动面,两个操纵腿130a、130b贴靠在保持腿112的第二腿区段115上,从而操纵腿130a、130b可以沿着第
二腿区段115滑动并且由此被引导。两个滑动面132a、132b平行于夹紧弹簧111的第二腿区段115的纵向延伸而延伸,使得两个操纵腿130a、130b以其滑动面132a、132b沿着第二腿区段115的长度滑动进而被引导。通过操纵腿130a、130b以及操纵元件128直接贴靠在保持腿113的第二腿区段115上,导体连接室129(导体被插入并夹紧在该导体连接室129中)至少在夹紧腿112的打开位置是侧向限定或封闭的,从而能够防止导体从导体连接室129侧向偏移。这两个操纵腿130a、130b横向于保持腿113的第二腿区段115延伸。两个滑动面132a、132b构造在两个操纵腿130a、130b的指向第二腿区段115方向的棱边面上。
39.通过这两个操纵腿130a、130b也侧向限定了构造在操纵元件128上的导体插入井133,待连接的导体通过该导体插入井插入导体连接室129中。导体插入井133汇入到导体连接室129中。
40.图3以剖视图示出了连接元件200。连接元件200具有壳体210,如在图2中示出的连接装置100布置在所述壳体中。壳体210具有导体插入开口211,待连接的导体经由该导体插入开口插入到壳体210中。导体插入开口211汇入导体插入井133中并且因此汇入导体连接室129中。待连接的导体的插入方向e横向于操纵元件128的操纵方向b构造。
41.壳体210优选由绝缘材料构造。
42.在图3中示出了在夹紧位置的夹紧弹簧111的夹紧腿112。
43.图4示出了连接装置100,其具有一个电流条110、两个布置在电流条110上的夹紧弹簧111和两个操纵元件128。电流条110、夹紧弹簧111和操纵元件128根据图1和图2中示出的构造方案构造。
44.图4中所示的连接装置110实现了两个导体的同时连接。
45.附图标记说明
46.100 连接装置
47.110 电流条
48.111 夹紧弹簧
49.112 夹紧腿
50.113 保持腿
51.114 第一腿区段
52.115 第二腿区段
53.116 第三腿区段
54.117 弧形区段
55.118 第一弯曲部
56.119 第二弯曲部
57.120 连接部位
58.121 上侧
59.122 下侧
60.123 开口
61.124 止动钩
62.125 端棱
63.126a、126b 纵向棱边面
64.127a、127b 横向棱边面
65.128 操纵元件
66.129 导体连接室
67.130a、130b 操纵腿
68.131 自由空间
69.132a、132b 滑动面
70.133 导体插入井
71.200 连接元件
72.210 壳体
73.211 导体插入开口
74.b 操纵方向
75.e 插入方向
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1