一种大电流手电动一体高压真空永磁断路器的制作方法
1.本发明涉及一种断路器,具体说是一种大电流手电动一体高压真空永磁断路器。
背景技术:
2.真空永磁断路器在配电电路中是最常用的一种控制和保护电器,应用范围广泛,广泛应用于配电系统的各级出线和终端系统中。传统结构的真空永磁断路器需要电能供给,在缺电或失电情况下,无法高效、稳定接通和分断电路,存在使用安全隐患。
技术实现要素:
3.本发明提供了一种在手动、电动控制的基础上,有效兼顾到安全、稳定作业的大电流手电动一体高压真空永磁断路器。
4.本发明采用的技术方案是:一种大电流手电动一体高压真空永磁断路器,包括设置在外壳内的永磁机构、真空断路机构和手动驱动机构,永磁机构下接永磁驱动杆,永磁驱动杆下铰接驱动拐臂一端,驱动拐臂中部经拐臂轴穿接在外壳内,驱动拐臂另一端接真空断路器绝缘拉杆下端,其特征在于:所述手动驱动机构包括手动主动轴、手动从动轴、手动驱动链轮组、手动驱动凸轮、挂杆、棘爪、棘轮、复位弹簧、拉紧弹簧、拉紧座、拉紧摆臂、张紧弹簧、复位扳手、复位驱动轴、复位拉板、复位拉杆、复位驱动臂,手动主动轴、手动从动轴、复位驱动轴与拐臂轴平行穿接在壳体内,所述手动主动轴、手动从动轴上接手动驱动链轮组,手动从动轴上穿接手动驱动凸轮,手动驱动凸轮贴合在驱动拐臂一端上;所述手动主动轴上固定穿接椭圆凸轮或设置椭圆截面轴段,椭圆凸轮或椭圆轴段穿接在挂杆的垂直腰孔内,挂杆下端铰接棘爪一端,棘爪一端经复位弹簧拉接在外壳上,棘爪另一端铰接在外壳上,棘爪中部下对应设置穿接在手动从动轴上的棘轮;所述复位驱动轴外接复位扳手,复位驱动轴内段铰接复位拉板上端,复位拉板下端旋转穿接复位调整柱,复位调整柱上穿接复位拉杆,复位拉杆活动穿接在复位驱动臂一端,复位驱动臂另一端连接驱动拐臂一端;所述手动从动轴上穿接拉紧摆臂一端,拉紧摆臂另一端铰接拉紧座下端,拉紧座上端钩接拉紧弹簧下端,拉紧弹簧上端钩接在外壳内;所述张紧弹簧下端钩接拐臂轴、上端钩接在外壳内。
5.进一步地,所述拉紧座上端两侧分别钩接两拉紧弹簧的下端,两拉紧弹簧上端钩接在外壳内。
6.进一步地,所述永磁驱动杆上设置驱动导向槽,手动从动轴穿接驱动导向槽,手动驱动凸轮贴合在驱动拐臂与永磁驱动杆铰接销轴外侧上。
7.进一步地,所述驱动拐臂与永磁驱动杆铰接销轴穿接复位驱动臂另一端。
8.进一步地,还包括手动限位摆臂、手动限位柱、手动限位复位弹簧,手动主动轴上接手动限位摆臂上端,外壳上设置限位手动限位摆臂过量旋转的手动限位柱,手动限位摆臂下端经手动限位复位弹簧接在外壳上。
9.进一步地,所述永磁机构包括电源控制模块、缸体、上驱动线圈、下驱动线圈、中间
磁铁圈结构、动铁芯、电磁驱动轴,电源控制模块设置在外壳内,电源驱动模块接缸体内的上、下驱动线圈,上、下驱动线圈之间设置中间磁铁圈结构,动铁芯穿接在电磁驱动轴上呈在上驱动线圈、中间磁铁圈结构、下驱动线圈内升降驱动状态,电磁驱动轴下接永磁驱动杆。
10.本断路器在电动工作状态下时,电源控制模块供给下驱动线圈驱动动铁芯带动电磁驱动轴下行,永磁驱动杆下行驱动驱动拐臂一端,使驱动拐臂绕拐臂轴旋转,驱动拐臂另一端抬起由绝缘拉杆上升合闸真空断路器;反之,电源控制模块供给上驱动线圈驱动动铁芯带动电磁驱动轴上行,从而完成驱动拐臂另一端下降断开真空断路器。
11.在断路器手动作业时,采用外部、外置的扳手驱动手动主动轴旋转,手动主动轴旋转经手动驱动链轮组带动手动从动轴旋转,手动从动轴上手动驱动凸轮随转驱动驱动拐臂与永磁驱动杆铰接的销轴,下压驱动拐臂一端完成合闸;同时,椭圆凸轮或设置椭圆截面轴段随手动主动轴在垂直腰孔内旋转,椭圆凸轮或设置椭圆截面轴段的椭圆长边转到短边朝上支撑垂直腰孔,挂杆下行放下棘爪一端,手动从动轴上的棘轮同步旋转,棘爪中部爪结构钩接锁紧棘轮,限位手动驱动到位,此时手动驱动凸轮正好处于最远端下压驱动拐臂销轴状态,防止过量旋转,在合闸状态下,复位驱动臂随驱动拐臂下转,复位拉杆末端拉接到复位驱动臂上。手动主动轴在手动限位复位弹簧经手动限位摆臂作用下反向旋转,椭圆凸轮或设置椭圆截面轴段的椭圆短边转到长边朝上支撑垂直腰孔使得挂杆带动棘爪克服复位弹簧作用力抬起松开与棘轮卡接,同步带动手动从动轴反转。
12.手动作业需要断开作业时,按下复位扳手,由复位驱动轴旋转带动复位拉板经复位调整柱拉动复位拉杆,复位拉杆拉动复位驱动臂,在张紧弹簧的回复力作用下,快速带动驱动拐臂一端向上旋转,从而完成断开作业。手动从动轴的旋转经其端部拉紧摆臂旋转拉紧座,由拉紧座上端两拉紧弹簧确保旋转到位后的定位拉紧,使得手动驱动凸轮的抵紧稳定。
附图说明
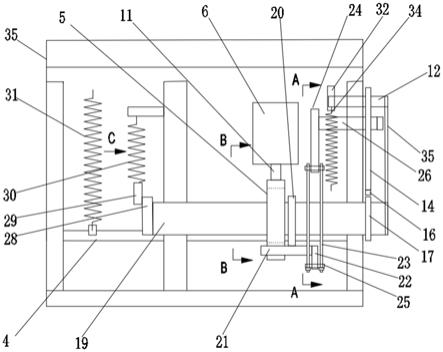
13.图1为本发明结构示意图;图2为图1右视图;图3为图1中a-a视图;图4为图1中b-b视图;图5为图1中c向视图;图6为本发明永磁机构结构示意图。
14.图中:真空断路机构1、绝缘拉杆2、驱动拐臂3、拐臂轴4、永磁驱动杆5、缸体6、上驱动线圈7、下驱动线圈8、中间磁铁圈结构9、动铁芯10、电磁驱动轴11、手动主动轴12、椭圆轴段13、挂杆14、垂直腰孔15、棘爪16、棘轮17、复位弹簧18、手动从动轴19、手动驱动凸轮20、拐臂销轴21、复位驱动臂22、复位拉杆23、复位拉板24、复位拉杆销25、复位驱动轴26、驱动导向槽27、拉紧摆臂28、拉紧座29、拉紧弹簧30、张紧弹簧31、手动限位摆臂32、手动限位柱33、手动限位复位弹簧34、外壳35、手动驱动链轮组36。
具体实施方式
15.以下结合附图和实施例作进一步说明。
16.图1-6所示:一种大电流手电动一体高压真空永磁断路器,包括真空断路机构1、绝缘拉杆2、驱动拐臂3、拐臂轴4、永磁驱动杆5、缸体6、上驱动线圈7、下驱动线圈8、中间磁铁圈结构9、动铁芯10、电磁驱动轴11、手动主动轴12、椭圆轴段13、挂杆14、垂直腰孔15、棘爪16、棘轮17、复位弹簧18、手动从动轴19、手动驱动凸轮20、拐臂销轴21、复位驱动臂22、复位拉杆23、复位拉板24、复位拉杆销25、复位驱动轴26、驱动导向槽27、拉紧摆臂28、拉紧座29、拉紧弹簧30、张紧弹簧31、手动限位摆臂32、手动限位柱33、手动限位复位弹簧34、壳体35。
17.永磁机构设置在外壳35内,如图6永磁机构包括电源控制模块、缸体6、上驱动线圈7、下驱动线圈8、中间磁铁圈结构9、动铁芯10、电磁驱动轴11,电源控制模块设置在外壳内,电源驱动模块接缸体6内的上、下驱动线圈7、8,上、下驱动线圈之间设置中间磁铁圈结构9,动铁芯10穿接在电磁驱动轴11上呈在上驱动线圈、中间磁铁圈结构、下驱动线圈内升降驱动状态,电磁驱动轴下接永磁驱动杆5。
18.如图4所示,永磁驱动杆5上开设驱动导向槽27,手动从动轴19穿过驱动导向槽27穿接在外壳内,手动从动轴19上套接手动驱动凸轮20,永磁驱动杆5下端经拐臂销轴21销接驱动拐臂3前端,驱动拐臂3中部的拐臂轴4穿接在外壳内,驱动拐臂后端铰接真空断路机构1的绝缘拉杆2,拐臂销轴21还接复位驱动臂22一端,复位驱动臂22另一端上穿接复位拉杆销25,复位拉杆销25两端穿接两复位拉杆23下端,复位拉杆可在复位拉杆销内滑动且复位拉杆底部限位防脱出,两复位拉杆23上端穿接复位拉板24上复位拉杆销两端,复位拉板24铰接在穿接外壳上的复位驱动轴26上,复位驱动轴26外伸外壳外接复位扳手。结合图1,驱动拐臂上经连接座连接张紧弹簧31下端,张紧弹簧31上端连接外壳内。
19.如图2所示,外壳上还穿接平行于手动从动轴19上方的手动主动轴12,手动主动轴12,手动主动轴12和手动从动轴19经手动驱动链轮组36绕接传动,手动主动轴12上设置一端截面为椭圆的椭圆轴段13,椭圆轴段13挂接挂杆14的垂直腰孔15内,挂杆14下端铰接棘爪16一端,棘爪16一端还经复位弹簧18拉接外壳,棘爪16另一端铰接在外壳上,棘爪16下设有与其对应卡接配合的棘轮17,棘轮17穿接在手动从动轴19上。
20.如图3所示,外壳内壁上的手动主动轴12内连接手动限位摆臂32一端,手动限位摆臂32另一端拉接手动限位复位弹簧34上端,手动限位复位弹簧34下端连接外壳内壁,外壳内壁上还设置对应限位手动限位摆臂32的手动限位柱33。
21.如图5所示,手动从动轴19的内端部穿接拉紧摆臂28一端,拉紧摆臂28另一端铰接拉紧座29下端,拉紧座29上端两侧分别拉紧两拉紧弹簧30下端,两拉紧弹簧30上端钩接在外壳内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1