一种清洁机器人的电池组件及清洁机器人的制作方法
1.本实用新型涉及清洁机器人技术领域,尤其涉及一种清洁机器人的电池组件及清洁机器人。
背景技术:
2.传统的清洁机器人的电池装配在电池仓中,并且电池通过电池端子与主板电路的电路端子于电池仓中连接,实现电池与主板电路的电连接。由于在清洁机器人的移动工作过程中,相互连接的电池端子与电路端子会发生移动、晃动,电池端子和电路端子进而与电池仓侧壁发生磕碰,有可能发生漏电起火的危险。
技术实现要素:
3.本实用新型的目的在于提供了一种清洁机器人的电池组件及清洁机器人,能够较好的固定电池端子和电路端子,避免晃动现象的发生,提高安全性。
4.本实用新型第一方面提供一种清洁机器人的电池组件,包括:
5.电池;
6.电池端子,所述电池端子与所述电池电连接,用于与所述清洁机器人的电路板的电路端子连接;
7.电池安装件,用于安装所述电池;
8.固定件,所述固定件设置于电池安装件的外表面,所述固定件用于卡合固定所述电池端子和/或所述电路端子。
9.在本公开的一种示范性实施方式中,所述固定件为卡扣结构,所述固定件与所述电池安装件的外表面配合而卡夹所述电池端子和/或所述电路端子。
10.在本公开的一种示范性实施方式中,所述固定件包括:
11.弹性臂,所述弹性臂包括第一端及第二端,所述第一端固定设于所述电池安装件的外侧,所述弹性臂与所述电池安装件的外表面之间形成用于卡夹所述电池端子和/或所述电路端子的固定位,所述弹性臂在朝向所述电池安装件的方向上可发生弹性形变,以将所述电池端子和/或所述电路端子卡夹固定于所述固定位内。
12.在本公开的一种示范性实施方式中,所述固定件还包括连接部,所述连接部连接所述弹性臂与所述电池安装件,所述连接部与所述弹性臂呈夹角设置。
13.在本公开的一种示范性实施方式中,所述弹性臂靠近所述第二端处设有限位部,所述限位部朝向所述固定位一侧用于与电池端子和/或电路端子相抵持限位。
14.在本公开的一种示范性实施方式中,所述限位部背向所述固定位的一侧设有导向部。
15.在本公开的一种示范性实施方式中,所述固定件与所述电池安装件为一体成型结构。
16.在本公开的一种示范性实施方式中,所述固定件为多个,且相对设置,多个所述固
定件分别用于卡合固定所述的电池端子及电路端子。
17.在本公开的一种示范性实施例中,所述弹性臂背向所述固定位的一侧设有加强筋。
18.在本公开的一种示范性实施方式中,所述电池安装件为电池盒,包括下壳和盖合在所述下壳上的上盖,所述电池安置于所述电池盒内,所述固定件设置在所述下壳或所述上盖上。
19.在本公开的一种示范性实施方式中,所述上盖与所述下壳接合的一端端面设有向内凹陷的第一凹槽或向外凸出的第一凸条,所述下壳与所述上盖接合的一端端面设有向外凸出的第二凸条或向内凹陷的第二凹槽,所述上盖和所述下壳通过所述第一凸条卡入所述第一凹槽或者所述第二凸条卡入所述第二凹槽的方式连接;
20.所述电池盒上还开设有通孔,所述通孔用于导线从中穿过,所述导线用于连接位于电池盒内的电池及位于电池盒外的电池端子。
21.本实用新型第二方面提供了一种清洁机器人,包括:
22.电池仓,所述电池仓中安装有如上述任一项所述的电池组件,所述电池组件的电池端子与从电池仓中引出的电路端子通过固定件固定;
23.所述电池组件中的固定件位于所述电池仓的内侧壁与电池安装件之间。
24.与现有技术相比,本实用新型具有如下有益效果:
25.本实用新型通过设置于电池安装件外侧的固定件,卡合固定电池端子和/或电路端子,使电池端子及/或电路端子较好的固定,避免了晃动现象的发生,使得电池端子和电路端子不会发生移动,从而不与电池仓侧壁产生磕碰,提高安全性。
附图说明
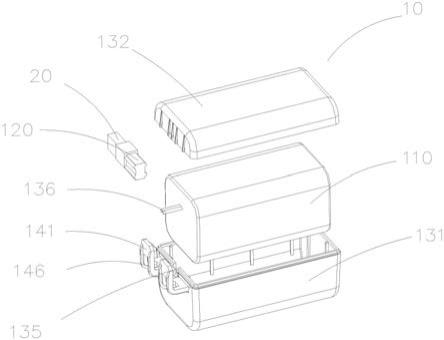
26.图1示出了本公开一实施方式所述的电池组件的爆炸结构示意图;
27.图2示出了本公开一实施方式所述的电池组件的侧视图;
28.图3示出了图2所述的电池组件在a-a方向上的截面示意图;
29.图4示出了本公开一实施方式所述的电池组件的俯视图;
30.图5示出了本公开一实施方式所述的清洁机器人电池仓未封盖时的结构示意图。
31.附图标记:
32.1、清洁机器人;
33.10、电池组件;20、电路端子;30、壳体;
34.110、电池;120、电池端子;130、电池安装件;131、下壳;132、上盖;133、第一凹槽;134、第二凸条;135、通孔;136、导线;140、固定件;141、弹性臂;1411、第一端;1412、第二端;142、固定位;143、连接部;144、限位部;145、导向部;146、加强筋;300、电池仓。
具体实施方式
35.为了进一步说明本实用新型的原理和结构,现结合附图对本实用新型的优选实施方式进行详细说明。
36.以下结合附图,对本实用新型予以进一步地详尽阐述。
37.本公开实施方式提供了一种清洁机器人,清洁机器人是一种特种机器人,主要从
事家庭卫生的清洁、清洗工作,主要种类有扫地机器人、拖地机器人、墙面清洗机器人等。
38.如图5所示,本公开实施方式提供的清洁机器人1包括壳体30、电路主板(图未示)及电池组件10。
39.壳体30为清洁机器人1的外壳。壳体用于装配电池组件10及电路主板,并且,电池组件10与电路主板收容于壳体30内。
40.电路主板用于承载电子元器件,如清洁机器人所需的各种芯片。电路主板与电池组件10电连接,以通过电池组件对电路主板供电。电路主板设有电路端子20,以方便电路主板与电池组件10进行电连接。该电路端子20可以为插接接头,也可以为接触弹片等。此处不对电路端子20的具体结构形式做限定。
41.具体地,壳体30开设有用于安装电池组件10的电池仓300。电池仓300包括设于壳体30的外表面的凹槽,以便于将电池组件10拆装操作。并且,该电池仓300还设有用于封盖该凹槽的盖板,以将电池组件10封闭于凹槽内,避免电池组件10裸露。
42.电池组件10为对清洁机器人1的供电装置。可以理解,该清洁机器人1还可以设有电源插头,以兼容市电供电。
43.如图1所示,本公开实施方式的电池组件10包括电池110、电池端子120、电池安装件130及固定件140。
44.电池110用于存储电能。电池110还可以为锂电池或碱性电池等。
45.电池端子120为从电池110的一端引出的电连接接口。电池端子120与电池110电连接,用于和清洁机器人的电路端子101连接,以便于将电池110的电能输送给电路主板进行供电。具体在本实施方式中,电池端子120为插接式接线端子,则电路端子101为与电池端子适配的接线端子。电池端子120和电路端子101均为条状,两者通过插接的方式连接在一起。
46.电池安装件130用于安装电池110。电池安装件130可为电池盒、框架结构或者固定板等,只要能够将电池安装固定即可。
47.具体在本实施方式中,如图1及图3所示,电池安装件130包括下壳131和上盖132。上盖132盖合在下壳131上以形成电池盒,电池110安置于电池盒内。这样的话,既能对电池110进行安置,又通过电池盒将电池与电池端子120和电路端子20进行了物理隔绝,避免电池端子120和电路端子20连接处的带电体与电池110接触,造成危害。通过设置电池盒,将电池安装于电池盒中,电池盒还可以作为单独的零件,将其进行出售。
48.具体地,下壳131与上盖132接合的一端端面设有向外凸出的第二凸条134或向内凹陷的第二凹槽。上盖132与下壳131接合的一端端面设有向内凹陷的第一凹槽133或向外凸出的第一凸条。上盖132和下壳131通过第一凸条卡入第二凹槽或者第二凸条134卡入第一凹槽133的方式连接,通过凸条卡入凹槽的方式可以快速安装固定上盖132和下壳131。
49.举例而言,上盖132与下壳131还可以通过粘接的方式连接,但不限于此。
50.示例地,如图1所示,电池盒上还开设有通孔135,通孔135用于导线136从中穿过,导线136用于连接位于电池盒内的电池110及位于电池盒外的电池端子120。通孔135开设的位置位于电池盒上设置固定件140的一侧侧壁上,这样可以节约导线的长度,当然,通孔135也可以开设在电池盒其他侧壁上。
51.具体在本实施方式中,如图1和图5所示,固定件140设置在下壳131或上盖132上,用于卡合固定电池端子120和/或电路端子20。通过采用固定件140卡合固定的方式,对电池
端子120和/或电路端子20进行了较好的固定,避免了晃动现象的发生,使得电池端子120和电路端子20不会发生移动,从而不与电池仓300侧壁产生磕碰,提高安全性。将电池组件10安装到电池仓300里后,固定件140位于电池仓300的内侧壁与电池安装件130之间,便于控制固定件140在电池仓300内的位置,使得电池端子120和/或电路端子20通过固定件140固定后,与电池仓300的内壁间能够有一定安全距离,在本实施方式中,该安全距离为大于等于3mm,该距离可以通过改变固定件140的壁厚、增大电池仓300的尺寸及特别设置固定件140在电池安装件130上的位置等方式来实现。
52.结合图3所示,固定件140包括弹性臂141,弹性臂141包括第一端1411及第二端1412,第一端1411固定设置于电池安装件130的外侧,弹性臂141与电池安装件130的外表面之间形成用于卡夹电池端子120和/或电路端子20的固定位142。弹性臂141在朝向电池安装件130的方向上可发生弹性形变,以将电池端子120和/或电路端子20卡夹固定于固定位142内。
53.举例而言,固定件140还可以为与电池端子120及电路端子20形状适配的筒体,筒体配有筒盖,筒盖具有容许电池端子及电路端子连接导线穿过的开口,固定时,将电路端子和电池端子刚好装入筒体中,电池端子和电路端子与筒体内壁紧配合,并由筒盖封闭,实现对电池端子和/或电路端子的卡合固定。
54.示例地,如图3所示,固定件140还包括连接部143,连接部143连接弹性臂141与电池安装件130,连接部143与弹性臂141呈夹角设置。可选地,连接部143与弹性臂141的第一端连接,夹角范围为45
°
至90
°
,比如60
°
、75
°
、90
°
等等,使得固定件140大致呈l形,利用弹性臂141的弹性特性,与电池安装件130的外侧壁配合将电池端子120和/或电路端子20卡合固定。
55.示例地,如图3所示,为了加强固定效果,使电池端子120和/或电路端子20不易脱离固定位142,弹性臂141靠近第二端处1412设有限位部144,限位部144朝向固定位142一侧用于与电池端子120和/或电路端子20相抵持限位。限位部144可以为弹性臂141靠近第二端处朝向固定位一侧延续形成的凸块,凸块与弹性臂141、连接部143形成卡扣结构,并与电池安装件130配合形成卡夹电池端子120及/或电路端子20的固定位142。
56.示例地,如图3所示,限位部144背向固定位142的一侧设有导向部145,导向部145可以方便将电池端子120和/或电路端子20插入固定位142的时候对其进行导向。该导向部145可以为斜面,斜面靠近连接部143的一端相较于斜面远离连接部143的一端更靠近电池安装件130。
57.示例地,如图3所示,为了简化制造工艺,降低装配难度,固定件140为一体成型结构。为了进一步降低装配难度,固定件140还可与电池安装件130一体成型而成。当然,固定件140也可为分体式结构,固定件140与电池安装件130还可以采用粘接的方式进行连接。
58.示例地,如图2、图3及图4所示,固定件140为多个,且相对设置,多个固定件140分别用于卡合固定电池端子120及电路端子20。可选地,固定件140为两个,分别用于卡合固定电池端子120及电路端子20,即可取得较好的固定效果。
59.示例地,如图1所示,弹性臂141背向固定位142的一侧设有加强筋146,用于加强固定件140的强度,使其不容易掰断。可选地,加强筋146为两个,两者相对设置,分别位于弹性臂141背向固定位142的一侧的两边沿,两加强筋146均沿第一端1411至第二端1412的方向
设置。
60.以上仅为本实用新型的较佳可行实施例,并非限制本实用新型的保护范围,凡运用本实用新型说明书及附图内容所作出的等效结构变化,均包含在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1