机械臂和包含其的晶圆传送系统的制作方法
1.本实用新型涉及半导体制造技术领域,具体涉及一种机械臂和包含其的晶圆传送系统。
背景技术:
2.在集成电路制造业中,需要经过数百上千道工序在晶圆的表面形成纳米级别尺度的电子元器件和电路。通常,对晶圆进行的工序包括但不限于清洗、氧化、热处理、沉积、光刻、刻蚀、平坦化以及沉积。在进行上述工序时,往往需要通过机械臂对晶圆进行传送(例如,在对晶圆进行刻蚀时,通过安装于刻蚀设备的转换室和前端模块中的机械臂将晶圆传送至真空反应腔室进行刻蚀)。
3.然而,相关技术中提供的机械臂,在对晶圆进行传送后,容易导致晶圆背部的磨损,进而导致背部对应的区域出现不平整和异常,当晶圆进行光刻对应的工序时,会出现异常区域的聚焦超过设定规格无法补偿的问题,使得产品无法正常流通,需要通过人工进行处理,降低了生产效率;同时,背部的磨损加剧了光刻设备的吸盘(chuck)对应的表面的颗粒污染,增加了产品异常的风险,且会对光刻设备的吸盘表面造成污染,会有一定几率导致宕机。
技术实现要素:
4.本实用新型提供了一种机械臂和包含其的晶圆传送系统,可以解决相关技术中提供的机械臂由于和晶圆的接触面积较小导致晶圆背面容易磨损的问题。
5.一方面,本实用新型提供了一种机械臂,所述机械臂应用于晶圆传送系统中,包括:
6.伸出部,所述伸出部为叉状,所述叉状的伸出部包括第一叉尖、第二叉尖和底部,所述第一叉尖和所述第二叉尖的一端与所述底部的一端连接,所述第一叉尖和所述第二叉尖的长度相等,所述第一叉尖上形成有第一垫部,所述第二叉尖上形成有第二垫部;
7.固定部,所述固定部的一端与所述底部的另一端连接,所述固定部上形成有第三垫部和第四垫部,所述固定部的另一端与所述晶圆传送系统中的传送设备连接;
8.当所述机械臂进行晶圆传送工作时,晶圆放置于所述机械臂上且与所述第一垫部、所述第二垫部、所述第三垫部和所述第四垫部接触,所述晶圆与所述第一垫部、所述第二垫部、所述第三垫部和所述第四垫部的接触面的面积大于50平方毫米。
9.可选的,所述第一叉尖、所述第二叉尖、所述底部和所述固定部一体成型。
10.可选的,所述第一叉尖、所述第二叉尖、所述底部和所述固定部的构成材料为石英。
11.可选的,所述底部形成有孔洞。
12.可选的,所述固定部的宽度大于所述伸出部的宽度。
13.可选的,所述伸出部的长度大于所述固定部的长度。
14.另一方面,本实用新型提供了一种晶圆传送系统,包括如上任一所述的机械臂。
15.本实用新型技术方案,至少包括如下优点:
16.通过在机械臂的伸出部上设置第一垫部和第二垫部,在机械臂的固定部上设置第三垫部和第四垫部,且第一垫部、第二垫部、第三垫部和第四垫部和晶圆的接触为面接触(接触面积大于50平方毫米),从而解决了相关技术中提供的机械臂由于和晶圆的接触面积较小导致晶圆背面容易磨损的问题,提高了生产效率和产品的良率。
附图说明
17.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
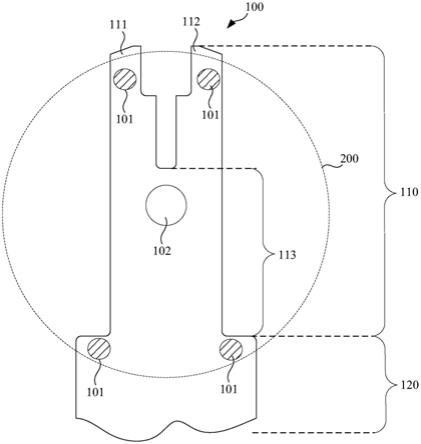
18.图1是本实用新型一个示例性实施例提供的机械臂的俯视示意图。
具体实施方式
19.下面将结合附图,对本发明中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在不做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。
20.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
21.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电气连接;可以是直接相连,也可以通过中间媒介间接相连,还可以是两个元件内部的连通,可以是无线连接,也可以是有线连接。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
22.此外,下面所描述的本实用新型不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
23.参考图1,其示出了本实用新型一个示例性实施例提供的机械臂的俯视示意图,如图1所示,该机械臂100应用于晶圆传送系统中,其包括:
24.伸出部110,其为叉状,该叉状的伸出部110包括第一叉尖111、第二叉尖112和底部113,第一叉尖111和第二叉尖112的一端与底部113的一端连接,第一叉尖111和第二叉尖112的长度相等,第一叉尖111上形成有第一垫部101,第二叉尖112上形成有第二垫部102。其中,第一垫部101和第二垫部102为凸出的结构。
25.固定部120,其一端与底部113的另一端连接,固定部120上形成有第三垫部103和第四垫部104,固定部120的另一端与晶圆传送系统中的传送设备(图1中未示出)连接。其
中,第三垫部103和第四垫部104为凸出的结构。
26.其中,固定部120的宽度大于伸出部110的宽度,伸出部110的长度大于固定部120的长度。可选的,底部113形成有孔洞102(以减轻机械臂的重量)。
27.当机械臂100进行晶圆传送工作时,晶圆200放置于机械臂100上且与第一垫部101、第二垫部102、第三垫部103和第四垫部104接触,晶圆200与第一垫部101、第二垫部102、第三垫部103和第四垫部104的接触面的面积大于50平方毫米(例如,其可以在100平方毫米以上)。
28.可选的,第一叉尖111、第二叉尖112、底部113和固定部120一体成型,一体成型的第一叉尖111、第二叉尖112、底部113和固定部120的构成材料为石英。
29.可选的,第一垫部101、第二垫部102、第三垫部103和第四垫部104与第一叉尖111、第二叉尖112、底部113和固定部120一体成型,一体成型的机械臂的构成材料为石英。
30.综上所述,本实用新型实施例中,通过在机械臂的伸出部上设置第一垫部和第二垫部,在机械臂的固定部上设置第三垫部和第四垫部,且第一垫部、第二垫部、第三垫部和第四垫部和晶圆的接触为面接触(接触面积大于50平方毫米),从而解决了相关技术中提供的机械臂由于和晶圆的接触面积较小导致晶圆背面容易磨损的问题,提高了生产效率和产品的良率。
31.另一方面,本实用新型实施例提供了一种晶圆传送系统,其包括如上任一所述的机械臂。
32.显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1