搬送装置和基板的搬送方法与流程
1.本发明涉及对基板进行搬送的搬送装置和基板的搬送方法。
背景技术:
2.在基板处理单元中,在对基板进行搬送时,为了防止在基板上附着异物或产生损伤,要求不与进行了处理的面或形成有器件的区域接触地进行搬送。
3.因此,开发了利用伯努利效应非接触地进行搬送的方式、仅夹持基板的外周部而进行搬送的边缘夹持方式等。但是,存在如下的问题:在基于伯努利效应的非接触搬送中,保持力较弱,并且在边缘夹持方式中,当基板的尺寸增大时,基板产生挠曲。
4.另外,为了不与进行了处理的面或形成有器件的区域接触地进行搬送,还开发了如下的搬送装置:在基板与保持垫之间设置间隙,在该间隙中夹设水的层,利用水的表面张力而借助保持垫对基板进行保持、搬送(例如参照专利文献1)。
5.专利文献1:日本特开2009-252877号公报
6.另外,在具有在利用搬送单元保持着基板的状态下将海绵按压至相反侧的面并使海绵旋转而进行清洗的机构的装置中,需要增强保持力。但是,在通过利用了伯努利效应的搬送垫、边缘夹持方式或者水的表面张力将基板保持于保持垫而进行搬送的搬送装置中,存在如下的问题:伴随着清洗用的海绵的旋转,所保持的基板也会旋转,从而无法正常地清洗基板。
7.此外,在边缘夹持方式中,还存在如下的问题:进行夹持的夹持部件成为障碍而无法清洗基板的整个外周部。
技术实现要素:
8.因此,本发明的目的在于提供搬送装置和基板的搬送方法,能够提高保持力,并且能够不与实施了处理的区域直接接触地搬送基板。
9.根据本发明的一个方式,提供搬送装置,其具有对基板的被保持面进行保持并搬送的保持面,其中,该搬送装置具有:保持垫,其与该基板的该被保持面的外周部或该基板的侧面接触,在该基板的该被保持面与该保持面之间形成填充水的空间;移动单元,其使该保持垫在相对于该被保持面接近或远离的方向上移动;水提供单元,其向该空间提供水;以及吸引单元,其对填充到该空间的水进行吸引而提高对该基板进行保持的力,该搬送装置借助该水而利用该保持垫对该基板进行保持并搬送。
10.也可以为,所述吸引单元具有吸引泵,该吸引泵与吸引源和该空间连接,包含按照吸引一定量的填充到该空间的水的方式进行控制的开闭阀。
11.在所述搬送装置中,也可以为,该移动单元具有:臂,其经由吸引泵而与该保持垫连接;以及升降单元,其使该臂升降,该吸引单元伴随着该臂的升降而对该吸引泵进行驱动,从而对填充到该空间的水进行吸引。
12.在所述搬送装置中,也可以为,该基板的被该保持垫保持的该被保持面具有形成
于中央的凹部和围绕该凹部的凸部,该保持垫与该凸部接触。
13.在所述搬送装置中,也可以为,该保持垫具有与该被保持面对置的该保持面,该保持面具有形成于中央的凹部和围绕该凹部的凸部,该凸部与该基板的该被保持面的外周部或该基板的侧面接触,在该保持面与该基板之间形成填充水的该空间。
14.也可以为,所述搬送装置还具有对该水赋予振动的超声波振子。
15.在所述搬送装置中,也可以为,在该保持垫的外周部具有与吸引源连通且对该被保持面的外周部进行吸引保持的一个或多个吸引孔。
16.根据本发明的另一方式,提供基板的搬送方法,利用保持垫的保持面对基板的被保持面进行保持并搬送,其中,该基板的搬送方法具有如下的步骤:水提供步骤,向该基板的该被保持面提供水;保持垫接触步骤,使该基板的该被保持面的外周部或该基板的侧面与该保持面接触而形成填充水的空间;以及吸引步骤,对填充到该空间的水进行吸引而提高对该基板进行保持的力。
17.根据本发明的一个方式和另一方式,起到如下的效果:能够提高保持力,并且能够不与实施了处理的区域直接接触地搬送基板。
附图说明
18.图1是示出具有作为第1实施方式的搬送装置的搬出单元的加工装置的结构例的立体图。
19.图2是示出图1所示的加工装置的加工对象的基板的立体图。
20.图3是示出图2所示的基板的加工后的立体图。
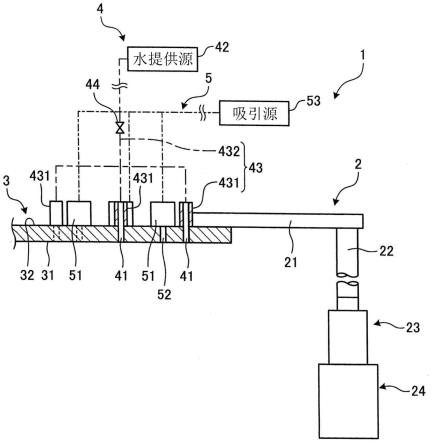
21.图4是以局部剖面示意性地示出作为第1实施方式的搬送装置的搬出单元的结构例的侧视图。
22.图5是图4所示的搬出单元的保持垫的俯视图。
23.图6是图5所示的搬出单元的保持垫的立体图。
24.图7是示出第1实施方式的基板的搬送方法的流程的流程图。
25.图8是示意性地示出图7所示的基板的搬送方法的保持垫接触步骤的将保持垫定位于基板的上方的状态的剖视图。
26.图9是示意性地示出使图8所示的保持垫下降而使保持垫与基板的环状凸部接触的状态的剖视图。
27.图10是示意性地示出图7所示的基板的搬送方法的水提供步骤的剖视图。
28.图11是示意性地示出图7所示的基板的搬送方法的吸引步骤的剖视图。
29.图12是示意性地示出图7所示的基板的搬送方法的搬送步骤后的基板等的剖视图。
30.图13是示出第2实施方式的基板的搬送方法的流程的流程图。
31.图14是示意性地示出图13所示的基板的搬送方法的水提供步骤的剖视图。
32.图15是示意性地示出图13所示的基板的搬送方法的保持垫接触步骤的使定位于基板的上方的保持垫下降的状态的剖视图。
33.图16是示意性地示出使图15所示的保持垫下降而使保持垫与基板的环状凸部接触的状态的剖视图。
34.图17是示意性地示出图13所示的基板的搬送方法的吸引步骤的剖视图。
35.图18是示意性地示出图13所示的基板的搬送方法的搬送步骤后的基板等的剖视图。
36.图19是示出第1实施方式和第2实施方式的第1变形例的搬出单元的主要部分的立体图。
37.图20是沿着图19中的xx-xx线的剖视图。
38.图21是示意性地示出第1实施方式和第2实施方式的第1变形例的基板的搬送方法的保持垫接触步骤和水提供步骤这两个步骤之后的状态的剖视图。
39.图22是示意性地示出第1实施方式和第2实施方式的第1变形例的基板的搬送方法的吸引步骤的使吸引泵的活塞下降的状态的剖视图。
40.图23是示意性地示出使图22所示的吸引泵的活塞上升而对空间内的水进行吸引的状态的剖视图。
41.图24是示意性地示出第1实施方式和第2实施方式的第2变形例的搬出单元的剖视图。
42.图25是示意性地示出第1实施方式和第2实施方式的第3变形例的搬出单元的剖视图。
43.图26是示意性地示出第1实施方式和第2实施方式的第4变形例的搬出单元的剖视图。
44.图27是第1实施方式和第2实施方式的第5变形例的搬出单元的保持垫的立体图。
45.图28是示意性地示出第1实施方式和第2实施方式的第5变形例的搬出单元的剖视图。
46.图29是示意性地示出第1实施方式和第2实施方式的第6变形例的搬出单元的剖视图。
47.图30是示意性地示出第1实施方式和第2实施方式的第7变形例的搬出单元的剖视图。
48.图31是从下方观察图30所示的搬出单元的弹性部件的立体图。
49.标号说明
50.1、1-1、1-2、1-3、1-4、1-5、1-6、1-7:搬出单元(搬送装置);2:移动单元;3、3-2、3-3、3-4:保持垫;4:水提供单元;5:吸引单元;6:水;7:超声波振子;8:吸引孔;21:搬送臂(臂);23:升降单元;31:保持面;33:第2凹部;34:第2凸部;51、51-1:吸引泵;53:吸引源;81:第2吸引源(吸引源);200:基板;205:背面(被保持面);206:圆形凹部(凹部);207:环状凸部(外周部、凸部);209:底面(实施了处理的区域);212:外侧面(侧面);220:空间;311:外周部;1001、1001-2:保持垫接触步骤;1002、1002-2:水提供步骤;1003:吸引步骤。
具体实施方式
51.以下,参照附图对本发明的实施方式进行说明。本发明并不被以下的实施方式所记载的内容限定。另外,在以下所记载的构成要素中包含有本领域技术人员能够容易想到的、实质上相同的内容。此外,以下所记载的结构能够适当组合。另外,能够在不脱离本发明的主旨的范围内进行结构的各种省略、置换或变更。
52.[第1实施方式]
[0053]
根据附图对作为本发明的第1实施方式的搬送装置的搬出单元1进行说明。图1是示出具有作为第1实施方式的搬送装置的搬出单元的加工装置的结构例的立体图。图2是示出图1所示的加工装置的加工对象的基板的立体图。图3是示出图2所示的基板的加工后的立体图。图4是以局部剖面示意性地示出作为第1实施方式的搬送装置的搬出单元的结构例的侧视图。图5是图4所示的搬出单元的保持垫的俯视图。图6是图5所示的搬出单元的保持垫的立体图。
[0054]
(基板)
[0055]
第1实施方式的搬出单元1构成图1所示的加工装置100。在第1实施方式中,加工装置100是对图2所示的基板200进行磨削的磨削装置。作为图1所示的加工装置100的加工对象的基板200是以硅、蓝宝石、镓等作为基材201的圆板状的半导体晶片或光器件晶片等晶片。如图2所示,基板200在基材201的正面202上具有器件区域210和围绕器件区域210的外周剩余区域211。
[0056]
器件区域210具有呈格子状地设定于基材201的正面202的分割预定线203以及形成于由分割预定线203划分出的各区域的器件204。
[0057]
器件204例如是ic(integrated circuit:集成电路)或lsi(large scale integration:大规模集成电路)等集成电路、ccd(charge coupled device:电荷耦合器件)或cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)等图像传感器、或者mems(micro electro mechanical systems:微机电系统)。外周剩余区域211是在整周范围内围绕器件区域210且在基材201的正面202上未形成器件204的区域。
[0058]
另外,在第1实施方式中,在通过加工装置100实施磨削加工之前,在器件区域210和外周剩余区域211的整个范围内,基板200的厚度形成为恒定,在器件区域210和外周剩余区域211的整个范围内,基板200的正面202和正面202的背面侧的背面205(相当于被保持面)分别形成为相同的平面。
[0059]
另外,在第1实施方式中,对于基板200,通过加工装置100对器件区域210的背面205进行磨削而如图3所示那样形成为所谓的taiko(注册商标)晶片,该taiko(注册商标)晶片在器件区域210的背面205侧形成有圆形凹部206(相当于凹部),外周剩余区域211形成有比器件区域210厚的环状凸部207(相当于凸部)。圆形凹部206形成于背面205的与器件区域210在厚度方向上重叠的区域,环状凸部207形成于背面205的与外周剩余区域211在厚度方向上重叠的区域。另外,在本说明书中,将背面205的与器件区域210在厚度方向上重叠的区域记载为背面205的器件区域210,将背面205的与外周剩余区域211在厚度方向上重叠的区域记载为背面205的外周剩余区域211。
[0060]
这样,基板200的背面205具有形成于中央的圆形凹部206和围绕圆形凹部206的环状凸部207,在器件区域210与外周剩余区域211之间形成有台阶208。另外,基板200的正面202在器件区域210和外周剩余区域211的整个范围内形成为同一平面。另外,圆形凹部206的底面209是通过加工装置100实施了磨削加工等处理的区域。
[0061]
在第1实施方式中,对于基板200,通过加工装置100对背面205实施磨削加工而形成圆形凹部206和环状凸部207,在圆形凹部206的底面209上通过镀金等形成由金属构成的膜。对于基板200,在圆形凹部206的底面209上形成有由金属构成的膜之后,沿着分割预定
线203分割成各个器件204,并且沿着圆形凹部206的外缘切断,从而将器件区域210和外周剩余区域211分离,即,将圆形凹部206和环状凸部207分离。
[0062]
(加工装置)
[0063]
接着,对加工装置100进行说明。加工装置100是对基板200的背面进行磨削而将基板200薄化至规定的完工厚度的磨削装置。如图1所示,加工装置100具有:装置主体101、粗磨削单元102、精磨削单元103、磨削进给单元104、转台105、设置在转台105上的多个(在第1实施方式中为三个)保持工作台106、盒107、对位单元108、搬入单元109、清洗单元110、搬出搬入单元111、控制单元112、以及作为搬送装置的搬出单元1。
[0064]
转台105是设置于装置主体101的上表面的圆盘状的工作台,设置成能够在水平面内绕与z轴方向平行的轴心进行旋转,在规定的时机进行旋转驱动。在该转台105上例如以120度的相位角等间隔地配设有例如三个保持工作台106。这三个保持工作台106是具有保持面与未图示的吸引源连接的真空卡盘的保持工作台构造,将基板200的正面202侧载置在保持面上,通过吸引源进行吸引而将基板200吸引保持于保持面。
[0065]
这些保持工作台106在磨削加工时通过旋转驱动机构在水平面内绕与铅垂方向即z轴方向平行的轴心进行旋转驱动。保持工作台106通过转台105的旋转而依次移动至搬入搬出区域301、粗磨削区域302、精磨削区域303、搬入搬出区域301。
[0066]
另外,搬入搬出区域301是相对于保持工作台106搬入搬出基板200的区域,粗磨削区域302是利用粗磨削单元102对保持工作台106所保持的基板200进行粗磨削(相当于磨削)的区域,精磨削区域303是利用精磨削单元103对保持工作台106所保持的基板200进行精磨削(相当于磨削)的区域。
[0067]
粗磨削单元102是安装有粗磨削用的磨削磨轮114而对粗磨削区域302的保持工作台106的保持面所保持的基板200的背面205的器件区域210进行粗磨削的磨削单元,该粗磨削用的磨削磨轮114呈环状地配设有对保持工作台106所保持的基板200的向上方露出的背面205的器件区域210进行粗磨削的粗磨削用的磨削磨具113。精磨削单元103是安装有精磨削用的磨削磨轮116而对精磨削区域303的保持工作台106的保持面所保持的基板200的背面205的器件区域210进行精磨削的磨削单元,该精磨削用的磨削磨轮116呈环状地配设有对保持工作台106所保持的基板200的背面205的器件区域210进行精磨削的精磨削用的磨削磨具115。
[0068]
磨削单元102、103通过电动机118使磨削磨轮114、116绕轴心进行旋转,并且一边将磨削水提供至磨削区域302、303的保持工作台106所保持的基板200的背面,一边通过磨削进给单元104使磨削磨具113、115以规定的进给速度靠近保持工作台106,由此对基板200的背面205的器件区域210进行粗磨削或精磨削,在背面205上形成圆形凹部206和环状凸部207。
[0069]
磨削进给单元104使磨削单元102、103在z轴方向上移动而使磨削单元102、103相对于保持工作台106远离和接近。在第1实施方式中,磨削进给单元104设置于从装置主体101的与水平方向平行的y轴方向的一端部竖立设置的立设柱117。磨削进给单元104具有:公知的滚珠丝杠,其设置成绕轴心旋转自如;公知的电动机,其使滚珠丝杠绕轴心进行旋转;以及公知的导轨,其将各磨削单元102、103的主轴壳体支承为在z轴方向上移动自如。
[0070]
另外,在第1实施方式中,对于粗磨削单元102和精磨削单元103,作为磨削磨轮
114、116的旋转中心的轴心与作为保持工作台106的旋转中心的轴心相互在水平方向上隔开间隔而平行地配置,磨削磨具113、115在保持工作台106所保持的基板200的背面的中心上通过。
[0071]
盒107具有多个插槽,是用于收纳多个基板200的收纳容器。如图1所示,盒107收纳多张磨削加工前后的基板200。在第1实施方式中,盒107设置有一对,分别设置于盒设置台。盒设置台使盒107在z轴方向上升降。对位单元108是用于暂放从盒107中取出的基板200而进行其中心对位的工作台。
[0072]
搬入单元109具有对基板200进行吸附的吸附垫。搬入单元109对利用对位单元108进行了对位的磨削加工前的基板200进行吸附保持而搬入至位于搬入搬出区域301的保持工作台106上。清洗单元110对磨削后的基板200进行清洗,将附着于磨削后的背面的磨削屑等污染物去除。
[0073]
搬出搬入单元111将磨削加工前的基板200从盒107中取出而将基板200搬送至对位单元108,并且将磨削加工后的基板200从清洗单元110取出而搬送至盒107中。搬出搬入单元111例如是具有u字型手臂119的机器人拾取器,通过u字型手臂119对基板200进行吸附保持而进行搬送。
[0074]
控制单元112分别控制构成加工装置100的上述各结构单元。即,控制单元112使加工装置100执行针对基板200的加工动作。控制单元112是计算机,该控制单元112具有:运算处理装置,其具有cpu(central processing unit:中央处理器)那样的微处理器;存储装置,其具有rom(read only memory:只读存储器)或ram(random access memory:随机存取存储器)那样的存储器;以及输入输出接口装置。
[0075]
控制单元112的运算处理装置按照存储于存储装置的计算机程序实施运算处理,将用于控制加工装置100的控制信号经由输入输出接口装置而输出至加工装置100的上述构成要素。另外,控制单元112与由显示加工动作的状态或图像等的液晶显示装置等构成的显示单元、操作者登记加工内容信息等时使用的输入单元以及向操作者进行通知的通知单元连接。输入单元由设置于显示单元的触摸面板和键盘等中的至少一个构成。通知单元发出声、光以及触摸面板上的信息中的至少任意一者而向操作者进行通知。
[0076]
(搬出单元)
[0077]
在第1实施方式中,搬出单元1对位于搬入搬出区域301的保持工作台106的保持面上的磨削加工后的基板200的实施了处理的区域即背面205进行吸引保持而将基板200搬送至清洗单元110。如图4所示,搬出单元1具有移动单元2、保持垫3、水提供单元4以及吸引单元5。
[0078]
移动单元2使保持垫3在图1所示的与水平方向平行的x轴方向、与水平方向平行且与x轴方向垂直的y轴方向以及与x轴方向和y轴方向这两个方向垂直且与铅垂方向平行的z轴方向上移动。在第1实施方式中,移动单元2使保持垫3在相对于位于搬入搬出区域301的保持工作台106所保持的基板200接近或远离的方向上移动。移动单元2使保持垫3沿着z轴方向移动,由此使保持垫3在相对于位于搬入搬出区域301的保持工作台106所保持的基板200接近或远离的方向上移动,并且使保持垫3从位于搬入搬出区域301的保持工作台106朝向清洗单元110沿着水平方向移动。
[0079]
在第1实施方式中,如图4所示,移动单元2具有:搬送臂21(相当于臂),其在一端部
安装有保持垫3;转动轴22,其与z轴方向平行且上端部安装于搬送臂21的另一端部;升降单元23,其与转动轴22的下端连结而使搬送臂21升降;以及旋转单元24,其使升降单元23绕与z轴方向平行的轴心进行旋转。搬送臂21由适当的金属材料形成,一端部例如通过未图示的紧固螺栓安装于保持垫3。
[0080]
升降单元23例如由气缸等构成,与安装于搬送臂21的另一端部的转动轴22连结,借助转动轴22而使搬送臂21沿着z轴方向升降。旋转单元24包含能够正转和反转的脉冲电动机,借助升降单元23和转动轴22而使搬送臂21以转动轴22为中心进行旋转。因此,升降单元23和旋转单元24能够将安装于搬送臂21的一端部的保持垫3定位于载置在位于搬入搬出区域301的保持工作台106的保持面上的基板200的背面205的上方。
[0081]
如图5和图6所示,保持垫3形成为外径为基板200的外径以上的较厚的圆板状。在第1实施方式中,保持垫3的外径与基板200的外径相等,但也可以形成为比基板200的外径大。保持垫3比基板200的外径大具有如下的效果:即使在保持垫3的定位时相对于基板200的位置发生偏移的情况下,也能够容易地将保持垫3与作为被保持面的背面205之间的空间220密闭而发挥保持力。保持垫3的厚度形成为恒定,在第1实施方式中,由peek等硬质的树脂构成。在本发明中,保持垫3例如也可以由氧化钛、玻璃、铝等亲水性较高的材料构成。
[0082]
另外,保持垫3具有保持面31,该保持面31与位于搬入搬出区域301的保持工作台106的保持面上的基板200的背面205对置,对基板200的背面205进行保持而进行搬送。在第1实施方式中,保持面31是保持垫3的下表面。当保持垫3的保持面31与基板200的环状凸部207的上表面接触时,使保持垫3的保持面31与环状凸部207的上表面之间保持液密。在本发明中,保持垫3也可以利用橡胶等具有弹性的树脂包覆保持面31上,从而能够使保持面31与基板200的背面205之间进一步保持液密。另外,如上所述,保持垫3具有对基板200的背面205进行保持的保持面31,因此基板200的背面205是基板200的被保持垫3保持的被保持面。
[0083]
保持垫3在通过移动单元2定位于位于搬入搬出区域301的保持工作台106的保持面的基板200的背面205的上方之后,进行下降而与保持工作台106的保持面上的基板200的背面205的外周部即环状凸部207的上表面接触,在与基板200的背面205的一部分即圆形凹部206的底面209之间形成填充水6(图10所示)的空间220(图9所示)。
[0084]
水提供单元4向上述空间220提供水6。如图4所示,水提供单元4具有提供孔41、水提供源42、提供管43以及开闭阀44。提供孔41是在z轴方向上贯穿保持垫3的孔。在第1实施方式中,如图5所示,提供孔41设置在保持垫3的中心和保持垫3的外缘部,在保持垫3的外缘部沿周向隔开间隔而设置有多个(在第1实施方式中为三个)。
[0085]
水提供源42经由提供孔41等而向上述空间220提供水6(在第1实施方式中为纯水)。提供管43是圆筒状的配管,在第1实施方式中,由具有挠性的树脂等构成。在第1实施方式中,提供管43具有:多个支管431,它们的一端与各提供孔41连接,另一端相互连结;以及一个主管432,其与多个支管431的另一端和水提供源42连接。在第1实施方式中,提供管43的支管431的一端安装于保持垫3的保持面31的背面侧的上表面32。
[0086]
开闭阀44设置于主管432,当打开时,将来自水提供源42的水6提供至空间220,当关闭时,停止从水提供源42向空间220提供水6。水提供单元4在保持垫3的保持面31与基板200的环状凸部207接触的状态下向空间220中填充水6,由此在保持面31不与圆形凹部206的底面209接触的情况下,通过填充到空间220的水6的表面张力而将基板200保持于保持垫
3的保持面31。
[0087]
吸引单元5对填充到空间220的水6进行吸引而提高对基板200进行保持的力。吸引单元5具有吸引一定量的包含开闭阀的吸引泵51。吸引一定量的包含开闭阀的吸引泵51与吸引源53和空间220连接,通过贯穿保持垫3的贯通孔52而与空间220连接,对填充到空间220内的水6进行吸引。在第1实施方式中,吸引一定量的包含开闭阀的吸引泵51是所谓的定量排出泵(也称为回吸阀),通过吸引源53进行吸引而从空间220内吸引预先确定的规定量的水6,并且当从空间220吸引规定量的水6时,停止水6的吸引。如果过度吸引填充到空间220的水6,则基板200会产生挠曲,因此需要选定符合基板200的尺寸、圆形凹部206的深度及直径的吸引泵51。
[0088]
在第1实施方式中,吸引泵51安装于保持垫3的上表面32。在第1实施方式中,如图5和图6所示,吸引泵51设置于保持垫3的上表面32的中心与设置于外缘部的提供孔41之间,在保持垫3的周向上隔开间隔地设置有多个(在第1实施方式中为三个)。即,在第1实施方式中,吸引单元5具有多个(在第1实施方式中为三个)吸引泵51。通过隔开间隔而具有多个吸引泵51,在多个部位均等地进行吸引,因此具有在进行吸引时使基板200偏向一部分而被吸引、变形的可能性为最小限度而吸引到保持垫3的效果。
[0089]
(基板的搬送方法)
[0090]
接着,对第1实施方式的基板的搬送方法进行说明。图7是示出第1实施方式的基板的搬送方法的流程的流程图。基板的搬送方法是利用保持垫3的保持面31对基板200的背面205进行保持而进行搬送的方法。在第1实施方式中,基板的搬送方法是上述搬出单元1利用保持垫3的保持面31对位于搬入搬出区域301的保持工作台106的保持面31上的磨削加工后的基板200的背面205进行保持而搬送至清洗单元110的方法。
[0091]
如图7所示,第1实施方式的基板的搬送方法具有保持垫接触步骤1001、水提供步骤1002、吸引步骤1003以及搬送步骤1004。
[0092]
(保持垫接触步骤)
[0093]
图8是示意性地示出图7所示的基板的搬送方法的保持垫接触步骤的将保持垫定位于基板的上方的状态的剖视图。图9是示意性地示出使图8所示的保持垫下降而使保持垫与基板的环状凸部接触的状态的剖视图。保持垫接触步骤1001是使基板200的背面205的环状凸部207与保持垫3的保持面31接触而形成填充水6的空间220的步骤。
[0094]
在保持垫接触步骤1001中,控制单元112使位于搬入搬出区域301且对实施了磨削加工的基板200进行保持的保持工作台106的吸引保持停止。在保持垫接触步骤1001中,控制单元112对搬出单元1的移动单元2进行控制,使保持垫3上升,如图8所示,将上升状态的保持垫3定位在位于搬入搬出区域的保持工作台106的保持面上的基板200的上方。
[0095]
在保持垫接触步骤1001中,控制单元112对搬出单元1的移动单元2进行控制,使保持垫3下降,如图9所示,使保持垫3的保持面31与位于搬入搬出区域的保持工作台106的保持面上的基板200的环状凸部207接触,使保持垫3的保持面31与基板200的环状凸部207的上表面之间保持液密,形成上述空间220。
[0096]
(水提供步骤)
[0097]
图10是示意性地示出图7所示的基板的搬送方法的水提供步骤的剖视图。水提供步骤1002是向基板200的背面205提供水6的步骤。在第1实施方式中,水提供步骤1002是在
保持垫接触步骤1001之后向空间220填充水6的步骤。
[0098]
在第1实施方式中,在水提供步骤1002中,控制单元112将开闭阀44打开,如图10所示,向形成于背面205的圆形凹部206的底面209与保持垫3的保持面31之间的空间220填充水6。在第1实施方式中,在水提供步骤1002中,当在空间220内充满水6时,控制单元112将开闭阀44关闭。于是,通过填充到空间220内的水6的表面张力而将基板200保持于保持垫3。
[0099]
(吸引步骤)
[0100]
图11是示意性地示出图7所示的基板的搬送方法的吸引步骤的剖视图。吸引步骤1003是对填充到空间220的水6进行吸引而提高保持垫3对基板200进行保持的力的步骤。
[0101]
在吸引步骤1003中,控制单元112对吸引泵51进行驱动而使各吸引泵51吸引规定量的填充到空间220内的水6,并使该水6排出到水提供源42。于是,填充到空间220内的水6的压力与空间220的外侧的压力相比降低,通过空间220的内外的压力差将基板200按压于保持垫3的保持面31,使保持垫3的保持面31与基板200的环状凸部207的上表面紧贴,从而提高保持垫3对基板200进行保持的力。
[0102]
(搬送步骤)
[0103]
图12是示意性地示出图7所示的基板的搬送方法的搬送步骤后的基板等的剖视图。搬送步骤1004是在吸引步骤1003之后对保持垫3的保持面31所保持的基板200进行搬送的步骤。
[0104]
在第1实施方式中,在搬送步骤1004中,控制单元112对移动单元2进行控制而使保持垫3上升,然后使搬送臂21以转动轴22为中心进行旋转,从而搬出单元1将保持垫3所保持的基板200搬送至清洗单元110。这样,搬出单元1借助填充到空间220内的水6而利用保持垫3对基板200进行保持、搬送。因此,搬出单元1能够在保持垫3不与基板200的圆形凹部206的底面209接触的情况下对基板200进行搬送,能够抑制基板200的圆形凹部206的底面209产生损伤或附着异物。由此,搬出单元1能够抑制由于基板200的圆形凹部206的底面209产生损伤而使器件204的抗弯强度降低的情况。
[0105]
另外,在第1实施方式中,对于搬送至清洗单元110的基板200,如图12所示,绕保持垫3的轴心进行旋转的清洗刷120与正面202接触,通过清洗单元110对正面202等进行清洗。清洗后的基板200通过搬出搬入单元111被搬送至盒107而收纳在盒107内。
[0106]
如以上说明的那样,第1实施方式的搬出单元1通过填充到空间220内的水6的表面张力将基板200保持于保持垫3而进行搬送,并且具有对填充到空间220内的水6进行吸引而提高保持垫3对基板200进行保持的力的吸引泵51,因此能够使基板200的背面205的环状凸部207与保持垫3的保持面31紧贴而对基板200进行保持、搬送。另外,第1实施方式的搬出单元1通过填充到空间220内的水6的表面张力将基板200保持于保持垫3而进行搬送,因此能够在保持垫3的保持面31不与基板200的圆形凹部206的底面209接触的情况下对基板200进行搬送。
[0107]
其结果为,第1实施方式的搬出单元1起到如下的效果:能够提高保持力,并且能够不与实施了磨削加工等处理的圆形凹部206的底面209直接接触地对基板200进行搬送。
[0108]
另外,第1实施方式的搬出单元1通过填充到空间220内的水6的表面张力将基板200保持于保持垫3而进行搬送,并且具有对填充到空间220内的水6进行吸引而提高保持垫3对基板200进行保持的力的吸引泵51,因此通过吸引使空间220内与大气压相比成为负压,
由此产生通过大气压将基板200按压于保持垫3的力,与基于伯努利效应的非接触搬送的保持力相比,能够提高对基板200进行保持的保持力。
[0109]
其结果为,第1实施方式的搬出单元1起到如下的效果:与基于伯努利效应的非接触搬送的保持力相比,能够提高保持力,并且能够不与实施了磨削加工等处理的圆形凹部206的底面209直接接触地对基板200进行搬送。
[0110]
另外,与基于伯努利效应的非接触搬送的保持力相比,第1实施方式的搬出单元1能够提高对基板200进行保持的保持力,因此即使使清洗刷120与基板200的正面202接触而对基板200的正面202进行清洗,也能够抑制基板200与清洗刷120一起联动旋转。第1实施方式的搬出单元1使环状凸部207与保持垫3的保持面31紧贴而对基板200进行保持,因此能够抑制保持垫3妨碍清洗刷120的清洗动作。另外,由于在保持垫3与基板200之间充满水6,因此即使按压清洗刷120,也能够降低基板200产生挠曲或者破裂的可能性。
[0111]
由于上述搬出单元1对基板200进行搬送,因此第1实施方式的基板的搬送方法起到如下的效果:能够提高保持力,并且能够不与实施了磨削加工等处理的圆形凹部206的底面209直接接触地对基板200进行搬送。
[0112]
[第2实施方式]
[0113]
根据附图对本发明的第2实施方式的基板的搬送方法进行说明。图13是示出第2实施方式的基板的搬送方法的流程的流程图。图14是示意性地示出图13所示的基板的搬送方法的水提供步骤的剖视图。图15是示意性地示出图13所示的基板的搬送方法的保持垫接触步骤的使定位于基板的上方的保持垫下降的状态的剖视图。图16是示意性地示出使图15所示的保持垫下降而使保持垫与基板的环状凸部接触的状态的剖视图。图17是示意性地示出图13所示的基板的搬送方法的吸引步骤的剖视图。图18是示意性地示出图13所示的基板的搬送方法的搬送步骤后的基板等的剖视图。另外,在图13、图14、图15、图16、图17以及图18中,对与第1实施方式相同的部分标注相同的标号并省略了说明。
[0114]
在第2实施方式中,与第1实施方式相同,基板的搬送方法是如下的方法:上述搬出单元1利用保持垫3的保持面31对位于搬入搬出区域301的保持工作台106的保持面31上的磨削加工后的基板200的背面205进行保持而搬送至清洗单元110。如图13所示,第2实施方式的基板的搬送方法具有水提供步骤1002-2、保持垫接触步骤1001-2、吸引步骤1003以及搬送步骤1004,除了在水提供步骤1002-2之后实施保持垫接触步骤1001-2以外,与第1实施方式相同。即,在本发明的基板的搬送方法中,也可以先实施水提供步骤1002、1002-2和保持垫接触步骤1001、1001-2中的任意步骤。
[0115]
在第2实施方式中,与第1实施方式相同,水提供步骤1002-2是向基板200的背面205提供水6的步骤。在第2实施方式中,水提供步骤1002-2是在保持垫接触步骤1001-2之前向作为之后的空间220的圆形凹部206内、即空间220填充水6的步骤。在第2实施方式中,在水提供步骤1002-2中,控制单元112使位于搬入搬出区域301且对实施了磨削加工的基板200进行保持的保持工作台106的吸引保持停止。在水提供步骤1002-2中,控制单元112对搬出单元1的移动单元2进行控制而使保持垫3上升,如图14所示,将上升状态的保持垫3定位在位于搬入搬出区域的保持工作台106的保持面上的基板200的上方。
[0116]
在第2实施方式中,在水提供步骤1002-2中,控制单元112将开闭阀44打开,如图14所示,向背面205的圆形凹部206的内侧填充水6。在第2实施方式中,在水提供步骤1002-2
中,当在圆形凹部206内充满水6时,控制单元112将开闭阀44关闭。
[0117]
在第2实施方式中,与第1实施方式相同,保持垫接触步骤1001-2是使基板200的背面205的环状凸部207与保持垫3的保持面31接触而形成填充了水6的空间220的步骤。在第2实施方式中,在保持垫接触步骤1001-2中,控制单元112对搬出单元1的移动单元2进行控制而使保持垫3如图15中箭头所示那样下降。
[0118]
在保持垫接触步骤1001-2中,如图16所示,控制单元112使保持垫3的保持面31与位于搬入搬出区域的保持工作台106的保持面上的基板200的环状凸部207接触,使保持垫3的保持面31与基板200的环状凸部207之间保持液密,形成上述空间220。于是,通过填充到空间220内的水6的表面张力,将基板200保持于保持垫3。
[0119]
在第2实施方式中,在保持垫接触步骤1001-2后,控制单元112与第1实施方式同样地依次实施图17所示的吸引步骤1003、搬送步骤1004,在第2实施方式中,如图18所示,搬送至清洗单元110的基板200与第1实施方式同样地通过清洗单元110的清洗刷120对正面202等进行清洗。
[0120]
与第1实施方式相同,由于上述搬出单元1对基板200进行搬送,因此第2实施方式的基板的搬送方法起到如下的效果:能够提高保持力,并且能够不与实施了磨削加工等处理的圆形凹部206的底面209直接接触地对基板200进行搬送。
[0121]
[第1变形例]
[0122]
根据附图对本发明的第1实施方式和第2实施方式的第1变形例的搬出单元1-1和基板的搬送方法进行说明。图19是示出第1实施方式和第2实施方式的第1变形例的搬出单元的主要部分的立体图。图20是沿着图19中的xx-xx线的剖视图。图21是示意性地示出第1实施方式和第2实施方式的第1变形例的基板的搬送方法的保持垫接触步骤和水提供步骤这两个步骤之后的状态的剖视图。图22是示意性地示出第1实施方式和第2实施方式的第1变形例的基板的搬送方法的吸引步骤的使吸引泵的活塞下降的状态的剖视图。图23是示意性地示出使图22所示的吸引泵的活塞上升而对空间内的水进行吸引的状态的剖视图。另外,在图19、图20、图21、图22以及图23中,对与第1实施方式相同的部分标注相同的标号并省略了说明。
[0123]
如图19所示,第1变形例的搬出单元1-1使移动单元2的搬送臂21借助吸引单元5的吸引泵51-1和圆环状的中间部件25而与保持垫3连接。搬送臂21的一端部安装于中间部件25。即,在第1变形例的搬出单元1-1中,移动单元2具有:搬送臂21,其借助吸引泵51-1而与保持垫3连接;以及中间部件25,其与吸引泵51-1和搬送臂21连接,吸引单元5的吸引泵51-1安装于保持垫3。
[0124]
如图20所示,第1变形例的搬出单元1-1的吸引单元5的吸引泵51-1具有:筒状的气缸511,其安装于保持垫3的上表面32;活塞512,其在气缸511内沿z轴方向移动自如;以及活塞杆513,其与活塞512一起在z轴方向上移动,下端安装于活塞512且上端安装于中间部件25。
[0125]
气缸511形成为筒状,内侧与贯通孔52连通而与空间220连通。在第1变形例中,气缸511通过螺钉514而安装于保持垫3的上表面32。活塞512在外周面上设置有使其与气缸511的内表面之间保持液密的o形环515。
[0126]
活塞杆513的一端与活塞512一体地形成,另一端通过设置于气缸511的上端的通
孔516而安装于中间部件25。在第1变形例中,活塞杆513通过螺钉517而安装于中间部件25。
[0127]
另外,在第1变形例中,吸引单元5具有圆环状的密封部件518,该密封部件518设置于吸引泵51-1的气缸511与保持垫3的上表面之间,使它们之间保持液密。
[0128]
在第1变形例的基板的搬送方法的保持垫接触步骤1001、1001-2和水提供步骤1002、1002-2这两个步骤之后,如图21所示,使保持垫3与基板200的环状凸部207接触而形成空间220,向空间220中填充水6,并且使吸引泵51-1的活塞512位于气缸511的上端部。
[0129]
在第1变形例的基板的搬送方法的吸引步骤1003中,控制单元112对移动单元2进行控制,在保持垫3与基板200的环状凸部207保持接触的状态下,如图22所示,使搬送臂21进一步下降,使中间部件25和吸引泵51-1的活塞512下降。在第1变形例的基板的搬送方法的吸引步骤1003中,使吸引泵51-1的活塞512下降,将气缸511内的空气排出到气缸511外,从而排出气缸511内的空气。另外,由于保持垫3与基板200的环状凸部207的上表面之间在该阶段未被完全密闭,因此气缸511内的空气从它们之间排出到空间220外。
[0130]
在第1变形例的基板的搬送方法的吸引步骤1003中,当吸引泵51-1的活塞512如图22所示那样位于气缸511的下端部时,如图23所示,控制单元112对移动单元2进行控制而使搬送臂21上升,使中间部件25和吸引泵51-1的活塞512上升。于是,吸引泵51-1对填充到空间220内的水6进行吸引,填充到空间220内的水6的压力与空间220的外侧的压力相比降低,通过空间220的内外的压力差将基板200按压于保持垫3的保持面31,使保持垫3的保持面31与基板200的环状凸部207紧贴,从而提高保持垫3对基板200进行保持的力。
[0131]
在第1变形例的搬出单元1-1对基板200进行搬送的基板的搬送方法中,在吸引步骤1003中,在吸引泵51-1的活塞512位于气缸511内的上止点之后,控制单元112继续控制移动单元2而使搬送臂21继续上升,实施搬送步骤1004。这样,在第1变形例中,吸引单元5伴随着搬送臂21的升降而对吸引泵51-1进行驱动,对填充到空间220的水6进行吸引。
[0132]
第1变形例的搬出单元1-1通过填充到空间220内的水6的表面张力而将基板200保持于保持垫3,并且具有对填充到空间220内的水6进行吸引而提高保持垫3对基板200进行保持的力的吸引泵51-1,因此与第1实施方式等同样地起到如下的效果:能够提高保持力,并且能够不与实施了磨削加工等处理的圆形凹部206的底面209直接接触地对基板200进行搬送。
[0133]
另外,在第1变形例的搬出单元1-1中,由于吸引泵51-1伴随着搬送臂21的升降而对填充到空间220的水6进行吸引,因此能够使吸引泵51-1与移动单元2的动作联动而对空间220内的水6进行吸引。如果过度吸引填充到空间220的水6,则基板200会产生挠曲,因此需要根据基板200的尺寸、圆形凹部206的深度及直径来调整吸引量,但在第1变形例中,通过调整使搬送臂21上升的量,能够调整所吸引的水6的量,因此即使在基板200的大小、圆形凹部206的深度及直径改变的情况下,也无需更换吸引泵51-1而能够容易地调整吸引量。
[0134]
[第2变形例]
[0135]
根据附图对本发明的第1实施方式和第2实施方式的第2变形例的搬出单元1-2进行说明。图24是示意性地示出第1实施方式和第2实施方式的第2变形例的搬出单元的剖视图。另外,在图24中,对与第1实施方式相同的部分标注相同的标号并省略了说明。
[0136]
在第2变形例的搬出单元1-2中,如图24所示,保持垫3-2的外径与基板200的外径相比形成为大径,保持垫3-2的保持面31具有:第2凹部33,其形成于中央,外缘部与基板200
的环状凸部207的上表面接触;以及第2凸部34,其围绕第2凹部33,并且朝向位于比第2凹部33靠搬入搬出区域301的位置的保持工作台106形成为凸状。
[0137]
第2变形例的搬出单元1-2的保持垫3-2在保持垫接触步骤1001、1001-2中,保持面31的第2凹部33的外缘部与基板200的背面205的环状凸部207的上表面接触,第2凸部34与基板200的外侧面212(相当于侧面)接触,形成向保持面31与基板200之间提供水6的上述空间220。另外,第2变形例的搬出单元1-2的保持垫3-2在第2凸部34的内表面具有o形环35,该o形环35与基板200的外侧面212接触而使第2凸部34的内表面与外侧面212之间保持液密。在第2变形例中,o形环35由橡胶等具有弹性的树脂构成。
[0138]
第2变形例的搬出单元1-2通过填充到空间220内的水6的表面张力将基板200保持于保持垫3-2,并且具有对填充到空间220内的水6进行吸引的吸引泵51,因此能够使基板200的背面205的环状凸部207与保持面31的第2凹部33紧贴,与第1实施方式等同样地起到如下的效果:能够提高保持力,并且能够不与实施了磨削加工等处理的圆形凹部206的底面209直接接触地对基板200进行搬送。另外,在第2变形例的搬出单元1-2中,由于保持面31的第2凹部33的外缘部与基板200的背面205的环状凸部207的上表面接触,第2凸部34与基板200的外侧面212(相当于侧面)接触而对基板200进行保持,因此能够防止所保持的基板200相对于保持垫3横向偏移。
[0139]
[第3变形例]
[0140]
根据附图对本发明的第1实施方式和第2实施方式的第3变形例的搬出单元1-3进行说明。图25是示意性地示出第1实施方式和第2实施方式的第3变形例的搬出单元的剖视图。另外,在图25中,对与第1实施方式相同的部分标注相同的标号并省略了说明。
[0141]
第3变形例的搬出单元1-3对基材201的厚度在器件区域210和外周剩余区域211的整个范围内恒定且基材201的正面202和背面205这双方平坦的基板200进行保持、搬送。在第3变形例的搬出单元1-3中,如图25所示,保持垫3-3的外径形成为与基板200的外径相等,保持垫3-3的保持面31具有:第2凹部33,其形成于中央,并且与基板200的中央部隔开间隔地对置;以及第2凸部34,其围绕第2凹部33,并且朝向位于比第2凹部33靠搬入搬出区域301的位置的保持工作台106形成为凸状,与基板200的背面205的外周部接触。
[0142]
第3变形例的搬出单元1-3的保持垫3-3在保持垫接触步骤1001、1001-2中,保持面31的第2凸部34与基板200的背面205的上表面的外周部接触,形成向保持面31与基板200之间提供水6的上述空间220。另外,第3变形例的搬出单元1-3的保持垫3-3在第2凸部34具有o形环36,该o形环36与基板200的外周部接触而使第2凸部34与基板200的外周部之间保持液密。在第3变形例中,o形环36由橡胶等具有弹性的树脂构成。
[0143]
第3变形例的搬出单元1-3通过填充到空间220内的水6的表面张力将基板200保持于保持垫3-3,并且具有对填充到空间220内的水6进行吸引的吸引泵51,因此能够使基板200的背面205的外周部与保持面31的第2凸部34紧贴,与第1实施方式等同样地起到如下的效果:能够提高保持力,并且能够不与实施了磨削加工等处理的圆形凹部206的底面209直接接触地对基板200进行搬送。
[0144]
[第4变形例]
[0145]
根据附图对本发明的第1实施方式和第2实施方式的第4变形例的搬出单元1-4进行说明。图26是示意性地示出第1实施方式和第2实施方式的第4变形例的搬出单元的剖视
图。另外,在图26中,对与第1实施方式相同的部分标注相同的标号并省略了说明。
[0146]
第4变形例的搬出单元1-4对基材201的厚度在器件区域210和外周剩余区域211的整个范围内恒定且基材201的正面202和背面205这双方平坦的基板200进行保持、搬送。在第4变形例的搬出单元1-4中,如图26所示,保持垫3-4的外径与基板200的外径相比形成为大径,保持垫3-4的保持面31具有:第2凹部33,其形成于中央,并且与基板200的背面205隔开间隔地对置;以及第2凸部34,其围绕第2凹部33,并且朝向位于比第2凹部33靠搬入搬出区域301的位置的保持工作台106形成为凸状。
[0147]
第4变形例的搬出单元1-4的保持垫3-4在保持垫接触步骤1001、1001-2中,保持面31的第2凹部33与基板200的背面205隔开间隔地对置,第2凸部34与基板200的外侧面212接触,从而形成向保持面31与基板200之间提供水6的上述空间220。另外,第4变形例的搬出单元1-4的保持垫3-4在第2凸部34的内表面上具有o形环35,该o形环35与基板200的外侧面212接触而使第2凸部34的内表面与外侧面212之间保持液密。在第4变形例中,o形环35由橡胶等具有弹性的树脂构成。
[0148]
第4变形例的搬出单元1-4通过填充到空间220内的水6的表面张力将基板200保持于保持垫3-4,并且具有对填充到空间220内的水6进行吸引的吸引泵51,因此能够使保持面31的第2凸部34的内表面与基板200的外侧面212紧贴,与第1实施方式等同样地起到如下的效果:能够抑制挠曲,并且能够不与实施了磨削加工等处理的圆形凹部206的底面209直接接触地对基板200进行搬送。另外,在第4变形例的搬出单元1-4中,由于第2凸部34与基板200的外侧面212(相当于侧面)接触而对基板200进行保持,因此能够防止所保持的基板200相对于保持垫3-4横向偏移。
[0149]
[第5变形例]
[0150]
根据附图对本发明的第1实施方式和第2实施方式的第5变形例的搬出单元1-5进行说明。图27是第1实施方式和第2实施方式的第5变形例的搬出单元的保持垫的立体图。图28是示意性地示出第1实施方式和第2实施方式的第5变形例的搬出单元的剖视图。另外,在图27和图28中,对与第1实施方式相同的部分标注相同的标号并省略了说明。
[0151]
如图27和图28所示,第5变形例的搬出单元1-5除了具有对填充到保持垫3与基板200之间的水6赋予振动的超声波振子7以外,与上述实施方式和变形例相同。另外,图27和图28示出了保持垫3与第1实施方式和第2实施方式相同的情况,但在本发明中,也可以是第2变形例、第3变形例以及第4变形例的保持垫3-2、3-3、3-4。
[0152]
与第1实施方式和第2实施方式相同,第5变形例的搬出单元1-5将基板200保持于保持垫3。超声波振子7设置于保持垫3。在图27和图28所示的例子中,超声波振子7安装于筒状部件71的底面,该筒状部件71的安装于保持垫3的中央的下方被封闭并且在该筒状部件71的上方设置有开口。筒状部件71的下表面与保持面31位于同一平面上。在筒状部件71的上表面上配设有超声波振子7之后,利用任意的板状物72等覆盖上方的开口。在图27和图28所示的例子中,超声波振子7在搬出单元1-5的保持垫3对基板200的搬送中被施加电压而发生振动,通过使水6振动而对作为基板200的被保持面的背面205进行清洗,从而将污染物去除。
[0153]
第5变形例的搬出单元1-5通过填充到空间220内的水6的表面张力将基板200保持于保持垫3,并且具有对填充到空间220内的水6进行吸引的吸引泵51,因此能够使基板200
的背面205的环状凸部207与保持垫3的保持面31紧贴而对基板200进行保持、搬送。另外,由于第5变形例的搬出单元1-5通过填充到空间220内的水6的表面张力将基板200保持于保持垫3而进行搬送,因此能够在保持垫3的保持面31不与基板200的圆形凹部206的底面209接触的情况下对基板200进行搬送。
[0154]
另外,第5变形例的搬出单元1-5在搬送中使填充到保持垫3与基板200之间的水6振动,由此能够将附着于被磨削面即底面209的异物或磨削屑去除。另外,当第5变形例的搬出单元1-5在搬送中实施被磨削面即底面209的清洗时,能够削减以往在将实施了磨削的基板200搬送至清洗单元110之后利用清洗单元110进行的基板200的清洗或者缩短基板200的清洗时间。
[0155]
特别是,第5变形例的搬出单元1-5对作为在背面205侧的中央形成有圆形凹部206且在外周部形成有围绕圆形凹部206的环状凸部207的所谓的taiko(注册商标)晶片的基板200进行搬送。其结果为,虽然存在积存于环状凸部207与圆形凹部206的边界213的异物或磨削屑等污染物不容易在以往的清洗方法中被去除的问题,但由于第5变形例的搬出单元1-5具有使水6振动的超声波振子7,因此能够从上述边界213去除污染物。
[0156]
[第6变形例]
[0157]
根据附图对本发明的第1实施方式和第2实施方式的第6变形例的搬出单元1-6进行说明。图29是示意性地示出第1实施方式和第2实施方式的第6变形例的搬出单元的剖视图。另外,在图29中,对与第1实施方式等相同的部分标注相同的标号并省略了说明。
[0158]
如图29所示,第6变形例的搬出单元1-6除了在保持垫3的与基板200的环状凸部207面对的保持面31的外周部311(相当于保持垫3的外周部)的整周设置有具有规定的厚度的环状的弹性部件37以外,与第5变形例相同。另外,图29示出了保持垫3与第1实施方式和第2实施方式相同的情况,但在本发明中,也可以是第2变形例、第3变形例以及第4变形例的保持垫3-2、3-3、3-4。
[0159]
环状的弹性部件37由橡胶等具有弹性的树脂构成。在第6变形例中,弹性部件37的外径与保持垫3的外径和基板200的外径相等,内径与基板200的环状凸部207的内径相等,但只要能够使环状凸部207与保持垫3之间紧贴,则弹性部件37的宽度可以小于也可以大于环状凸部207。第6变形例的搬出单元1-6使基板200的环状凸部207与设置于外周部311的弹性部件37紧贴,将基板200保持于保持垫3,在搬送中通过超声波振子7使空间220内的水6振动。
[0160]
第6变形例的搬出单元1-6除了第5变形例的效果以外,使作为基板200的外周部的环状凸部207与环状的弹性部件37接触而使填充有水6的空间220密闭,并且通过弹性部件37增大保持垫3相对于基板200的摩擦阻力而防止保持垫3从基板200偏移,能够提高吸附性,能够抑制由于超声波振子7的振动所导致的基板200的横向偏移。
[0161]
[第7变形例]
[0162]
根据附图对本发明的第1实施方式和第2实施方式的第7变形例的搬出单元1-7进行说明。图30是示意性地示出第1实施方式和第2实施方式的第7变形例的搬出单元的剖视图。图31是从下方观察图30所示的搬出单元的弹性部件的立体图。在图30和图31中,对与第1实施方式相同的部分标注相同的标号并省略了说明。
[0163]
如图30所示,第7变形例的搬出单元1-7除了在设置于保持垫3的与基板200的环状
凸部207面对的保持面31的外周部311的整周的环状的弹性部件37上具有与第2吸引源81(相当于吸引源)连通的吸引孔8以外,与第6变形例相同。另外,图30示出了保持垫3与第1实施方式和第2实施方式相同的情况,但在本发明中,也可以是第2变形例、第3变形例以及第4变形例的保持垫3-2、3-3、3-4。第2吸引源81是与上述吸引源53不同的吸引源。
[0164]
如图31所示,吸引孔8在弹性部件37的宽度方向的中央沿厚度方向贯穿弹性部件37而形成,在弹性部件37的周向上等间隔地配置。另外,吸引孔8经由设置于保持垫3的未图示的孔而与第2吸引源81连接。吸引孔8设置于弹性部件37,由此设置于保持垫3的保持面31的外周部311。另外,在本发明中,吸引孔8可以设置一个或多个。
[0165]
第7变形例的搬出单元1-7使基板200的环状凸部207与弹性部件37紧贴,并且通过第2吸引源81对吸引孔8进行吸引,由此将基板200的背面205的环状凸部207吸引保持于弹性部件37。这样,吸引孔8对基板200的环状凸部207进行吸引保持。第7变形例的搬出单元1-7在搬送中通过超声波振子7使空间220内的水6振动。
[0166]
与第6变形例相同,第7变形例的搬出单元1-7使作为基板200的外周部的环状凸部207与环状的弹性部件37接触而使填充有水6的空间220密闭,并且通过弹性部件37增大保持垫3相对于基板200的摩擦阻力而防止保持垫3从基板200偏移,能够提高吸附性,能够抑制由于超声波振子7的振动所导致的基板200的横向偏移。
[0167]
另外,第7变形例的搬出单元1-7即使在形成有圆形凹部206和环状凸部207的基板200发生翘曲的情况下,也能够通过吸引孔8将基板200的环状凸部207吸引保持于弹性部件37,因此弹性部件37吸附并紧贴于基板200的环状凸部207,因此能够矫正(或缓和)基板200的翘曲。其结果为,第7变形例的搬出单元1-7也能够搬送形成有圆形凹部206和环状凸部207而发生翘曲的基板200。
[0168]
另外,第7变形例的搬出单元1-7即使在形成有圆形凹部206和环状凸部207的基板200发生翘曲的情况下,也矫正(或缓和)翘曲而将基板200保持于保持垫3,在搬送中通过超声波振子7使空间220内的水6振动,对圆形凹部206和环状凸部207的内表面进行清洗。其结果为,第7变形例的搬出单元1-7能够抑制基板200的背面205的清洗时的破裂。
[0169]
另外,在本发明中,第2变形例和第3变形例的搬出单元1-2、1-3也可以与第7变形例同样地在o形环35形成与第2吸引源81连通的吸引孔8。
[0170]
另外,在本发明中,第7变形例的搬出单元1-7也可以不设置弹性部件37而在保持垫3的保持面31的外周部311具有吸引孔8。
[0171]
在第5变形例、第6变形例以及第7变形例中,记载了在基板200的搬送中通过超声波振子7使水6振动的方式,但在本发明中,也可以在实施了搬出单元1-5、1-6、1-7从保持工作台106搬送至清洗单元110的搬送步骤以及将基板200载置或吸引保持于清洗单元110的保持步骤之后,在将基板200载置于清洗单元110的保持工作台的状态下,使设置于保持垫3的超声波振子7振动,从而使水6振动。在该方式中,与以往的清洗相比也能够提高清洗力,此外,由于将基板200保持于清洗单元110,因此具有能够可靠地防止基板200落下的效果。
[0172]
在第5变形例、第6变形例以及第7变形例中,以作为taiko(注册商标)晶片的基板200为例进行了说明,但也可以对如下的基板200进行保持、搬送:不像taiko(注册商标)晶片那样形成有圆形凹部206和环状凸部207,除了形成于器件区域210的图案的凹凸以外,基材201的厚度在器件区域210和外周剩余区域211的整个范围内恒定,并且基材201的正面
202和背面205这双方大致平坦。
[0173]
另外,上述的第2变形例、第3变形例、第4变形例、第5变形例、第6变形例以及第7变形例的搬出单元1-2、1-3、1-4、1-5、1-6、1-7的吸引单元5具有与第1实施方式等相同的吸引泵51,但吸引单元5也可以具有与第1变形例相同的吸引泵51-1。
[0174]
另外,本发明并不限定于上述实施方式。即,能够在不脱离本发明的主旨的范围内进行各种变形来实施。另外,在本发明中,加工装置100不限于实施方式所记载的磨削装置,也可以是下述的装置等各种装置:利用卡盘工作台对基板200进行保持并利用切削刀具沿着分割预定线进行切削加工的切削装置;照射对于基板200具有透过性或吸收性的波长的激光束的激光加工装置;对基板200进行研磨加工的研磨装置;对基板200进行车刀切削加工的车刀切削装置;对基板200实施等离子蚀刻等的等离子装置;在基板200上粘贴粘接带的带粘贴装置;或者利用透明体对基板200进行保持并检查基板200的正面202和背面205的检查装置。
[0175]
另外,在本发明中,基板200并不限定于实施方式等所记载的晶片,也可以是具有多个被树脂密封的器件的矩形状的封装基板、陶瓷基板、铁素体基板或者包含镍和铁中的至少一方的基板等。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1