一种全自动低粘性双面胶带贴附热压设备的制作方法
1.本发明涉及电池贴胶技术领域,具体涉及一种全自动低粘性双面胶带贴附热压设备。
背景技术:
2.电池指盛有电解质溶液和金属电极以产生电流的杯、槽或其他容器或复合容器的部分空间,能将化学能转化成电能的装置。具有正极、负极之分。随着科技的进步,电池泛指能产生电能的小型装置。如太阳能电池。电池的性能参数主要有电动势、容量、比能量和电阻。利用电池作为能量来源,可以得到具有稳定电压,稳定电流,长时间稳定供电,受外界影响很小的电流,并且电池结构简单,携带方便,充放电操作简便易行,不受外界气候和温度的影响,性能稳定可靠,在现代社会生活中的各个方面发挥有很大作用。
3.现有技术存在以下不足:目前本领域内存在的此产品产能低,胶带贴附精度低,贴附效果褶皱,气泡多,良品率低,当前产品是为了解决电池芯在跌落后与外壳发生位移,引起短路自燃,同时在电池贴胶作业时,电池稳定性不好,传统设备通过对电池进行长时间的夹持作业来保证电池稳定,容易造成电池的损坏,影响使用。
4.因此,发明一种全自动低粘性双面胶带贴附热压设备很有必要。
技术实现要素:
5.为此,本发明提供一种全自动低粘性双面胶带贴附热压设备,以解决目前本领域内存在的此产品产能低,胶带贴附精度低,贴附效果褶皱,气泡多,良品率低,当前产品是为了解决电池芯在跌落后与外壳发生位移,引起短路自燃的问题。
6.为了实现上述目的,本发明提供如下技术方案:一种全自动低粘性双面胶带贴附热压设备,包括支撑板,所述支撑板上设有热压机构;所述热压机构包括入料输送机,所述入料输送机设于支撑板上并延伸出支撑板一侧,所述支撑板上位于入料输送机一侧设有入料翻转组件,所述支撑板上位于入料输送机另一侧设有设有上料机器人,所述支撑板上位于上料机器人一侧设有转盘组件,所述支撑板上位于所述转盘组件周向依次设有除尘组件、第一胶带贴附组件、第二胶带贴附组件、热压组件、撕膜组件、外观检查组件和下料翻转组件,所述下料翻转组件外侧设有下料移栽组件,所述下料移栽组件外侧设有排出移栽组件,所述转盘组件包括由伺服电机驱动的转盘主体,所述转盘主体上开设有若干个与电池相配合的加工槽,所述加工槽内设有用于定位电池的定位机构。
7.优选的,所述定位机构包括开设在所述加工槽内与电池贴合面的若干个吸附孔,所述吸附孔底部设有导风管,所述导风管与抽风机连接,位于所述加工槽内设有与抽风机和除尘组件、第一胶带贴附组件、第二胶带贴附组件、热压组件与撕膜组件电性连接的距离传感器。
8.优选的,所述导风管包括与所述抽风机连接的第一导流结构,以及与所述第一导
流结构连接的第二导流结构;所述第一导流结构包括与所述抽风机连接的第一导流管,与所述第一导流管连接的第二导流管,以及与所述第二导流管连接的第三导流管;用于连接第一导流管与第二导流管和第二导流管与第三导流管的两个连接弯管;所述第一导流结构与第二导流结构结构相同;所述第一导流管与第二导流管和第二导流管与第三导流管之间具有预定的角度a,所述第一导流管与第三导流管平行设置;所述连接弯管弯曲部呈圆弧状结构,所述连接弯管一端沿着第一导流管管道方向与第一导流管连通,另一端与第二导流管连通,所述连接弯管和第二导流管连通部与第二导流管之间具有预定的角度b,且a+b=180
°
。
9.优选的,所述除尘组件安装于支撑板上。
10.优选的,所述第一胶带贴附组件安装于支撑板上。
11.优选的,所述第二胶带贴附组件安装于支撑板上。
12.优选的,所述热压组件安装于支撑板上。
13.优选的,所述撕膜组件安装于支撑板上。
14.优选的,所述外观检查组件安装于支撑板上。
15.优选的,所述下料翻转组件安装于支撑板上。
16.本发明的有益效果是:1.本发明通过入料输送机将上一工序生产的电池流入到本设备中,入料翻转组件将入入料输送机上的电池进行180度翻转,翻转后电池将通过上料机器人放入到转盘组件上,转盘组件转动将电池移动到下一工位,通过除尘组件进行表面离子除尘,转盘组件再转动将电池移动到下一工位,通过第一胶带贴附组件进行双面胶贴附,通过第二胶带贴附组件进行可以对下一个电池进行双面胶贴附,即第一胶带贴附组件和第二胶带贴附组件分别对不同的电池进行贴胶,从而可以提高电池贴胶的速度,转盘组件转动再将电池移动到下一工位,通过热压组件进行表面热压,转盘组件转动将电池移动到下一工位,通过撕膜组件进行撕膜,转盘组件转动将电池移动到下一工位,通过外观检查组件进行检查贴附后胶带相对电池边框的位置和贴附后胶带表面是否有气泡、褶皱等,转盘组件转动将电池移动到下一工位,通过下料翻转组件进行下料翻转度,通过下料移栽组件将电池从转盘上抓取到排出移栽组件上,最后通过排出移载将电池送到下一道工序设备内,使得本发明具有高产能,高贴附精度,性价比高,全自动的特点,本设备解决了大量人员成本的投入,提高了产品整体的合格率,贴附完成后有ccd检查,对操作人员的主观意识判断的依赖性低,能够确保生产的统一性,进而提高了胶带贴附精度的问题,解决了贴附效果褶皱,气泡多,良品率低等一系列的问题;2.通过距离传感器对除尘组件、第一胶带贴附组件、第二胶带贴附组件、热压组件和撕膜组件在工作时与电池的距离进行检测,当到达对电池加工作业距离时,抽风机进行抽风,配合导风管和吸附孔,使得加工槽内形成负压,进而使得电池贴合紧密,同时在导风时,通过设置的第一导流结构和第二导流结构,抽风作业的气流大部分从第一导流管导向第二导流管,剩下部分从连接弯管导向第二导流管,第二导流管导出的气流大部分从第二导流管导向第三导流管,剩下部分从另一连接弯管导向第三导流管,由于第一导流管与第二导流管和第二导流管与第三导流管之间具有预定的角度a,连接弯管和第二导流管连通部与第二导流管之间具有预定的角度b,且a+b=180
°
,使得两个连接弯管导向第二导流管和
第三导流管的气流推动第一导流管导向第二导流管和第二导流管导向第三导流管的气流,进而提高气流的流速,通过高流速的气流来保证电池吸附稳定,进而不需要通过夹持工件来保证电池稳定,不易造成电池的损坏,方便使用。
附图说明
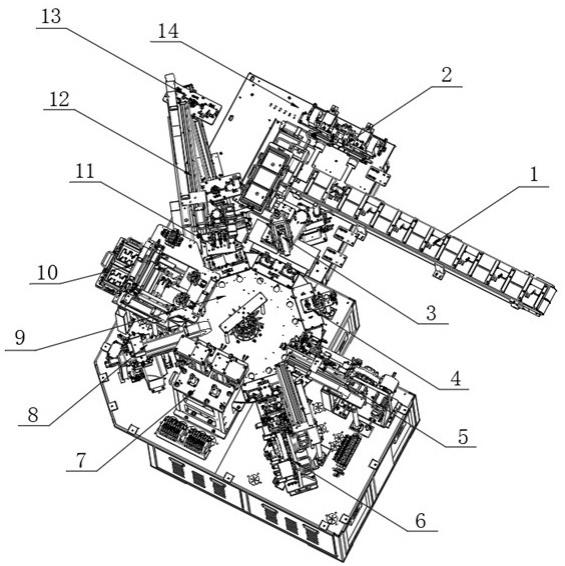
17.图1为本发明提供的整体结构示意图。
18.图中:1、入料输送机;2、入料翻转组件;3、上料机器人;4、除尘组件;5、第一胶带贴附组件;6、第二胶带贴附组件;7、热压组件;8、撕膜组件;9、转盘组件;10、外观检查组件;11、下料翻转组件;12、下料移栽组件;13、排出移栽组件;14、支撑板。
具体实施方式
19.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
20.参照附图1,本发明提供的一种全自动低粘性双面胶带贴附热压设备,包括支撑板14,支撑板14上设有热压机构;热压机构包括入料输送机1,入料输送机1设于支撑板14上并延伸出支撑板14一侧,支撑板14上位于入料输送机1一侧设有入料翻转组件2,支撑板14上位于入料输送机1另一侧设有设有上料机器人3,支撑板14上位于上料机器人3一侧设有转盘组件9,支撑板14上位于转盘组件9周向依次设有除尘组件4、第一胶带贴附组件5、第二胶带贴附组件6、热压组件7、撕膜组件8、外观检查组件10和下料翻转组件11,下料翻转组件11外侧设有下料移栽组件12,下料移栽组件12外侧设有排出移栽组件13,转盘组件9包括由伺服电机驱动的转盘主体,转盘主体上开设有若干个与电池相配合的加工槽,加工槽内设有用于定位电池的定位机构。
21.进一步地,定位机构包括开设在加工槽内与电池贴合面的若干个吸附孔,吸附孔底部设有导风管,导风管与抽风机连接,位于加工槽内设有与抽风机电和除尘组件4、第一胶带贴附组件5、第二胶带贴附组件6、热压组件7与撕膜组件8电性连接的距离传感器。
22.进一步地,导风管包括与抽风机连接的第一导流结构,以及与第一导流结构连接的第二导流结构;第一导流结构包括与抽风机连接的第一导流管,与第一导流管连接的第二导流管,以及与第二导流管连接的第三导流管;用于连接第一导流管与第二导流管和第二导流管与第三导流管的两个连接弯管;第一导流结构与第二导流结构结构相同;第一导流管与第二导流管和第二导流管与第三导流管之间具有预定的角度a,第一导流管与第三导流管平行设置;连接弯管弯曲部呈圆弧状结构,连接弯管一端沿着第一导流管管道方向与第一导流管连通,另一端与第二导流管连通,连接弯管和第二导流管连通部与第二导流管之间具有预定的角度b,且a+b=180
°
。
23.进一步地,除尘组件4安装于支撑板14上。
24.进一步地,第一胶带贴附组件5安装于支撑板14上。
25.进一步地,第二胶带贴附组件6安装于支撑板14上。
26.进一步地,热压组件7安装于支撑板14上。
27.进一步地,撕膜组件8安装于支撑板14上。
28.进一步地,外观检查组件10安装于支撑板14上。
29.进一步地,下料翻转组件11安装于支撑板14上。
30.本发明的使用过程如下:在使用本发明时,通过入料输送机1将上一工序生产的电池流入到本设备中,入料翻转组件2将入入料输送机1上的电池进行180度翻转,翻转后电池将通过上料机器人3放入到转盘组件9上,转盘组件9转动将电池移动到下一工位,通过除尘组件4进行表面离子除尘,转盘组件9再转动将电池移动到下一工位,通过第一胶带贴附组件5进行双面胶贴附,通过第二胶带贴附组件6进行可以对下一个电池进行双面胶贴附,即第一胶带贴附组件5和第二胶带贴附组件6分别对不同的电池进行贴胶,从而可以提高电池贴胶的速度,转盘组件9转动再将电池移动到下一工位,通过热压组件7进行表面热压,转盘组件9转动将电池移动到下一工位,通过撕膜组件8进行撕膜,转盘组件9转动将电池移动到下一工位,通过外观检查组件10进行检查贴附后胶带相对电池边框的位置和贴附后胶带表面是否有气泡、褶皱等,转盘组件9转动将电池移动到下一工位,通过下料翻转组件11进行下料翻转180度,通过下料移栽组件12将电池从转盘上抓取到排出移栽组件13上,最后通过排出移载将电池送到下一道工序设备内;通过距离传感器对除尘组件4、第一胶带贴附组件5、第二胶带贴附组件6、热压组件7和撕膜组件8在工作时与电池的距离进行检测,当到达对电池加工作业距离时,抽风机进行抽风,配合导风管和吸附孔,使得加工槽内形成负压,进而使得电池贴合紧密,同时在导风时,通过设置的第一导流结构和第二导流结构,抽风作业的气流大部分从第一导流管导向第二导流管,剩下部分从连接弯管导向第二导流管,第二导流管导出的气流大部分从第二导流管导向第三导流管,剩下部分从另一连接弯管导向第三导流管,由于第一导流管与第二导流管和第二导流管与第三导流管之间具有预定的角度a,连接弯管和第二导流管连通部与第二导流管之间具有预定的角度b,且a+b=180
°
,使得两个连接弯管导向第二导流管和第三导流管的气流推动第一导流管导向第二导流管和第二导流管导向第三导流管的气流,进而提高气流的流速,通过高流速的气流来保证电池吸附稳定,进而不需要通过夹持工件来保证电池稳定,不易造成电池的损坏,方便使用。
31.以上所述,仅是本发明的较佳实施例,任何熟悉本领域的技术人员均可能利用上述阐述的技术方案对本发明加以修改或将其修改为等同的技术方案。因此,依据本发明的技术方案所进行的任何简单修改或等同置换,尽属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1