基板搬送装置和基板搬送方法与流程
1.本公开涉及一种基板搬送装置和基板搬送方法。
背景技术:
2.例如在对作为基板的半导体晶圆(下面也称作“晶圆”)实施处理的装置中,在收容有晶圆的承载件与用于执行处理的晶圆处理室之间进行晶圆的搬送。在进行晶圆的搬送时,利用各种结构的晶圆搬送机构。
3.例如在专利文献1中,记载了一种基板搬送系统,其通过第一平面马达和设置于可垂直移动的第一升降机的第二平面马达来构成共面,使基板承载件在这些平面马达间进行悬浮移动。根据专利文献1的记载,该基板搬送系统构成为通过调节设置于第一平面马达、第二平面马达的多个线圈的配置来使基板承载件在两个平面马达间顺畅地移行。
4.现有技术文献
5.专利文献
6.专利文献1:日本特表2018-504784号公报
技术实现要素:
7.发明要解决的问题
8.本公开提供一种使基板搬送模块更准确地沿预先设定的设定路径移动的技术。
9.用于解决问题的方案
10.本公开是一种向用于进行基板的处理的基板处理室搬送基板的基板搬送装置,所述基板搬送装置具备:移动用区块,其具备移动面和多个第一磁体,所述多个第一磁体设置于从与外部之间交接所述基板的交接位置起至所述基板处理室内的所述基板的处理位置为止的所述基板的搬送区域内,所述多个第一磁体构成为能够改变磁场的状态;基板搬送模块,其保持所述基板,所述基板搬送模块具备第二磁体,所述第二磁体受到作用于该第二磁体与所述第一磁体的磁场之间的斥力和引力中的至少一方的磁力的作用,所述基板搬送模块构成为能够在使用所述磁力从所述移动面浮起的状态下沿所述移动面移动;搬送控制部,其控制通过所述多个第一磁体形成的磁场,以使所述基板搬送模块沿预先设定的设定路径移动;检测部,其检测与通过所述搬送控制部对所述磁场的控制而沿所述移动面移动的所述基板搬送模块的实际的移动路径相对于所述设定路径的偏离的大小对应的指标值;以及计算部,其基于所述指标值,以使偏离的大小减小的方式计算用于校正作用于所述第二磁体的磁力的校正参数,其中,在之后的沿着所述设定路径进行的基板的搬送中,所述搬送控制部进行基于所述校正参数来改变所述磁场的状态的校正。
11.发明的效果
12.根据本公开,能够使基板搬送模块更准确地沿预先设定的设定路径移动。
附图说明
13.图1是实施方式所涉及的晶圆处理系统的俯视图。
14.图2是搬送模块的俯视图。
15.图3是搬送模块和区块的透视立体图。
16.图4是搬送模块的移动路径的校正机构所涉及的块图。
17.图5是表示搬送模块的移动路径的例子的俯视图。
18.图6是搬送晶圆时的搬送模块的侧视图。
19.图7是表示移动路径的偏离与搬送模块的速度、加速度之间的关系的说明图。
20.图8是表示校正参数的计算方法的一例的说明图。
具体实施方式
21.下面,参照图1来说明具备本公开的实施方式的“搬送基板的装置”的晶圆处理系统100的整体结构。
22.在图1中示出具备多个晶圆处理室110的多腔室类型的晶圆处理系统100。晶圆处理室110相当于用于对晶圆w进行处理的基板处理室。
23.如图1所示,晶圆处理系统100具备加载端口141、大气搬送室140、加载互锁室130、真空搬送室120以及多个晶圆处理室110。在以下的说明中,将设置有加载端口141的方向设为晶圆处理系统100的近前侧。
24.在晶圆处理系统100中,加载端口141、大气搬送室140、加载互锁室130、真空搬送室120从近前侧起沿水平方向按照所记载的顺序配置。另外,当从近前侧观察时,多个晶圆处理室110并排地设置于真空搬送室120的左右。
25.加载端口141构成为用于载置承载件c的载置台,所述承载件c用于收容作为处理对象的晶圆w,从近前侧观察,所述加载端口141在左右方向上排列地设置有四个。作为承载件c,例如能够使用foup(front opening unified pod:前开式晶圆传送盒)等。
26.大气搬送室140内为大气压(常压)气氛,例如形成有洁净空气的下降流。另外,在大气搬送室140的内部设置有用于搬送晶圆w的晶圆搬送机构142。晶圆搬送机构142在承载件c与加载互锁室130之间进行晶圆w的搬送。另外,在大气搬送室140的例如左侧面设置有用于进行晶圆w的对准的对准室150。
27.在真空搬送室120与大气搬送室140之间,在左右方向上排列地设置有多个加载互锁室130。加载互锁室130具有升降销131,该升降销131从被搬入的晶圆w的下方举起并保持该晶圆w。本例的升降销131沿周向等间隔地设置有三个,所述升降销131构成为升降自如。加载互锁室130构成为能够在大气气氛与真空气氛之间进行切换。
28.加载互锁室130与大气搬送室140经由闸阀133连接。另外,加载互锁室130与真空搬送室120经由闸阀132连接。
29.真空搬送室120通过未图示的真空排气机构被减压为真空气氛。在图1所示的例子中,在真空气氛下进行晶圆w的搬送的真空搬送室120由在前后方向上长的、俯视观察时为矩形状的壳体构成。在本例的晶圆处理系统100中,在真空搬送室120的左右侧的侧壁部分别设置有两个晶圆处理室110,总共设置有四个晶圆处理室110。从近前侧观察图1所记载的真空搬送室120的内部时,如果划分为前部、后部这两个区域,则晶圆处理室110设置为以从
左右夹住各区域的方式相向。
30.在真空搬送室120的与各晶圆处理室110连接的侧壁部形成有用于与晶圆处理室110之间进行晶圆w的搬入和搬出的开口部,在该开口部设置有构成为开闭自如的闸阀121。
31.各晶圆处理室110经由闸阀121而与真空搬送室120连接。在通过未图示的真空排气机构将各晶圆处理室110减压至真空气氛的状态下,在设置于各晶圆处理室110的内部的载置台111上载置晶圆w,并对该晶圆w实施规定的处理。载置台111上的晶圆w的载置区域相当于该晶圆w的处理位置。晶圆处理室110具有升降销112,该升降销112从被搬入的晶圆w的下方举起并保持该晶圆w。本例的升降销112沿周向等间隔地设置有三个,所述升降销112构成为升降自如。
32.作为对晶圆w实施的处理,能够例示蚀刻处理、成膜处理、清洁处理、灰化处理等。
33.在载置台111设置有例如将晶圆w加热至预先设定的温度的未图示的加热器。在对晶圆w实施的处理是利用处理气体进行的处理的情况下,在晶圆处理室110设置由喷淋头等构成的未图示的处理气体供给部。另外,可以在晶圆处理室110设置用于将处理气体等离子体化的等离子体形成机构。
34.在真空搬送室120内收容有构成为方板状的多个搬送模块20。搬送模块20分别构成为能够通过磁悬浮在真空搬送室120内移动。搬送模块20相当于本实施方式的基板搬送模块。
35.在本例的晶圆处理系统100中,在加载互锁室130与各晶圆处理室110之间使用搬送模块20进行晶圆w的搬送。
36.晶圆处理系统100具备控制部5。控制部5由具备cpu和存储部的计算机构成,所述控制部5对晶圆处理系统100的各部进行控制。在存储部中记录有编入了用于控制搬送模块20、晶圆处理室110的动作等的步骤(命令)组的程序。该程序例如保存于硬盘、光盘、磁光盘、存储卡等存储介质中,并从这些存储介质安装至计算机。
37.下面,参照图2、图3来说明与利用搬送模块20进行的晶圆w的搬送有关的设备的结构。
38.搬送模块20具备用于载置并保持直径为300mm的晶圆w的、作为基板保持部的载置台2。例如,载置台2形成为一个边为300多mm的扁平的方板状。
39.搬送模块20进入晶圆处理室110、加载互锁室130内,来与升降销112、131之间进行晶圆w的交接。在搬送模块20形成有用于避免与升降销112、131之间发生干扰并进行晶圆w的交接的狭缝21。升降销112、131在从晶圆处理室110、加载互锁室130的底面突出的状态下保持晶圆w。狭缝21是沿着在使载置台2相对于被升降销112、131保持的晶圆w的下方位置进入、退出时升降销112、131所通过的轨道形成的。另外,狭缝21形成为还能够使朝向晶圆w的下方位置进入的进入方向反转180
°
。通过上述的结构,能够在搬送模块20与升降销112、131不发生干扰的情况下使搬送模块20与晶圆w以中心对齐的方式在上下方向上配置。
40.如图3中示意性地示出的那样,在加载互锁室130、真空搬送室120以及晶圆处理室110的底面侧设置有多个区块(移动用区块)10。这些区块10设置于从与外部的大气搬送室140之间交接晶圆w的交接位置(升降销131的配置位置)起至晶圆处理室110内的晶圆w的处理位置为止的晶圆w的搬送区域内。
41.在各区块10的内部分别排列有多个移动面侧线圈11。移动面侧线圈11通过被后述
的电源部53供给电力来产生磁场。移动面侧线圈11相当于本实施方式的第一磁体。
42.另一方面,在搬送模块20的内部排列有例如由永久磁体构成的多个模块侧磁体23。在模块侧磁体23与通过移动面侧线圈11生成的磁场之间作用有斥力(磁力)。通过其作用,能够使搬送模块20相对于区块10的上表面侧的移动面磁悬浮(磁浮)。另外,区块10能够通过多个移动面侧线圈11来调节产生磁力的位置、磁力的强度,由此改变磁场的状态。通过该磁场的控制,能够使搬送模块20在移动面上向期望的方向移动、能够调节距移动面的悬浮距离、搬送模块20的朝向。
43.设置于搬送模块20的模块侧磁体23相当于本实施方式的第二磁体。此外,多个模块侧磁体23可以由通过被设置于搬送模块20内的电池供给电力来作为电磁体发挥功能的线圈构成、或者通过设置永久磁体和线圈这两方来构成。
44.在本例的晶圆处理系统100中,图3中示意性地示出的区块10和搬送模块20构成用于搬送晶圆w的装置(晶圆搬送装置101)。
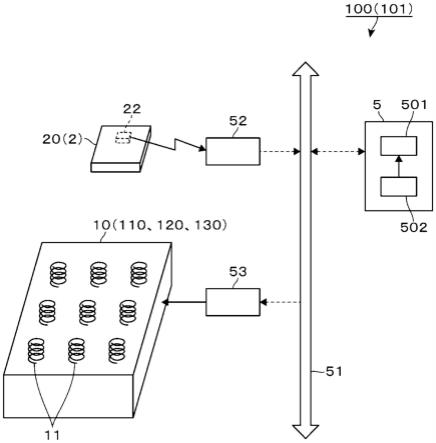
45.图4是表示晶圆搬送装置101所涉及的电结构的块图。从电源部53对设置于区块10的各移动面侧线圈11供给直流电力。电源部53经由总线51而与对晶圆处理系统100整体进行控制的已述的控制部5连接。控制部5具备作为搬送控制部501的功能,该搬送控制部501对通过设置于区块10的移动面侧线圈11形成的磁场进行控制,由此进行搬送模块20的动作控制。
46.将对作为供给电力的对象的移动面侧线圈11的选择、针对所选择的移动面侧线圈11的供电量、供电方向的切换(磁极的切换)等设为操作变量,来实施对移动面侧线圈11的磁场的控制。而且,通过调节这些操作变量,能够使搬送模块20沿预先设定的设定路径移动。
47.控制部5具备作为搬送控制部501的功能,该搬送控制部501控制晶圆搬送装置101中通过移动面侧线圈11形成的磁场,以使搬送模块20沿预先设定的设定路径移动。
48.例如当将承载件c载置于加载端口141时,读出规定针对在该承载件c的内部收容的多个晶圆w分别设定的处理内容的处理制程。
49.搬送控制部501基于该处理制程来确定能够执行处理制程所规定的处理的晶圆处理室110,制作关于这多个晶圆w的搬送计划表。搬送计划表例如包括用于确定在将从承载件c取出的晶圆w相对于真空搬送室120搬入和搬出时使用的加载互锁室130、进行该晶圆w的处理的晶圆处理室110的信息。并且,搬送计划表包括用于确定当在真空搬送室120内搬送晶圆w时使用的搬送模块20的信息、用于确定当在加载互锁室130与晶圆处理室110之间进行晶圆w的搬送时通过的路径(设定路径)的信息。
50.搬送控制部501基于上述的搬送计划表来进行向设置于区块10的各移动面侧线圈11供给电力的供给控制。其结果是,能够调节通过移动面侧线圈11形成的磁场。而且,通过使施加于搬送模块20的模块侧磁体23的磁力发生变化,能够使搬送模块20沿预先设定的设定路径移动。
51.在具备上述结构的晶圆搬送装置101中,通过搬送控制部501来进行针对各移动面侧线圈11的供电控制,如果能够按照设计对搬送模块20作用磁力,则能够使搬送模块20准确地沿设定路径移动。另一方面,区块10内的移动面侧线圈11、搬送模块20内的模块侧磁体23、用于检测搬送模块20的位置的检测器(例如霍尔传感器)的配置位置有时被配置成在公
差范围内偏离设计位置。配置于加载互锁室130、真空搬送室120以及晶圆处理室110的底面侧的大量的区块10的配置位置也是同样的。另外,各移动面侧线圈11的卷绕的均匀度、模块侧磁体23的磁力等特性也在每个设备之间存在偏差。
52.本技术的发明人发现,由于上述的各种误差原因等,在想要使搬送模块20沿图5、图6中的虚线所示的设定路径40移动时,实际上有时以在偏离设定路径40的移动路径41中振动的方式移动。在谋求搬送模块20的移动速度的高速化的情况下,优选尽可能减少这样的振动,以避免搬送模块20在移动过程中与其它搬送模块20、设备接触。
53.因此,本公开的晶圆搬送装置101具备检测沿区块10的移动面移动的搬送模块20的实际的移动路径41相对于设定路径40的偏离的大小并校正该偏离的机构。
54.关于用于进行偏离的校正的机构,搬送模块20具备公知的加速度传感器22,该加速度传感器22用于检测与作用于该搬送模块20的力的大小对应的指标值。加速度传感器22具有检测移动的搬送模块20的加速度的方向以及加速度的大小的功能。加速度传感器22相当于本例的检测部。
55.本例的加速度传感器22能够检测针对各搬送模块20设定的副坐标系(图2、图3、图5、图6中均记载的x
’‑y’‑
z’正交坐标系)的各方向的加速度。
56.此外,设置于搬送模块20的检测部可以由用于检测施加于该搬送模块20的角加速度的转矩传感器构成。在该情况下,通过将施加于搬送模块20的转矩分解到沿着副坐标系的方向,能够确定作用于各方向的加速度的大小。
57.通过加速度传感器22、转矩传感器检测的加速度与作用于移动的搬送模块20的力对应地进行增减。并且,如使用图7在后文中叙述的那样,搬送模块20的规定方向的加速度为与搬送模块20的实际的移动路径41相对于设定路径40偏离的大小对应的指标值。
58.表示由加速度传感器22检测出的各方向的加速度的大小的信息例如通过无线通信被输出至通信部52(图4)。
59.并且,如图4所示,在控制部5设置有校正参数计算部502的功能。校正参数计算部502具备求出校正参数的功能,所述校正参数用于以使沿着设定路径40搬送晶圆w的过程中的已述的偏离的大小减小的方式校正作用于搬送模块20的模块侧磁体23的磁力。基于该校正参数来校正搬送控制部501对磁场的控制内容。关于校正的具体方法,在后述的晶圆处理系统100(晶圆搬送装置101)的作用说明中叙述。
60.关于具备如以上说明的结构的晶圆处理系统100,说明使用搬送模块20进行晶圆w的搬送并在晶圆处理室110中进行晶圆w的处理的动作的一例。
61.首先,当将收容有作为处理对象的晶圆w的承载件c载置于加载端口141时,读出针对承载件c内的晶圆w设定的处理制程,制作各晶圆w的搬送计划表。基于该搬送计划表来实施下面说明的晶圆w的搬送动作。
62.通过大气搬送室140内的晶圆搬送机构142将收容于承载件c的晶圆w取出。接着,将晶圆w搬送至对准室150来进行对准。并且,当通过晶圆搬送机构142从对准室150取出晶圆w时,打开在搬送计划表中选择的加载互锁室130的闸阀133。
63.接着,晶圆搬送机构142进入闸阀133被打开了的加载互锁室130,通过设置于该加载互锁室130的升降销131来举起并接受该晶圆w。之后,当晶圆搬送机构142从加载互锁室130退避时,关闭闸阀133。并且,将加载互锁室130内从大气压气氛切换为真空气氛。
64.在加载互锁室130内成为真空气氛后,打开真空搬送室120侧的闸阀132。之后,使在搬送计划表中选择的搬送模块20磁悬浮,并使该搬送模块20从真空搬送室120进入加载互锁室130内。接着,使搬送模块20位于被升降销131支承的晶圆w的下方,使升降销131下降来将晶圆w交接至搬送模块20。之后,保持有晶圆w的搬送模块20从加载互锁室130退出。
65.返回真空搬送室120内的搬送模块20在磁悬浮的状态下在真空搬送室120内移动。而且,朝向四个晶圆处理室110中的在搬送计划表中选择的晶圆处理室110移动。此时,搬送模块20基于搬送计划表,沿预先设定的设定路径移动。
66.当搬送模块20到达与所选择的晶圆处理室110相向的位置时,打开该晶圆处理室110的闸阀121。搬送模块20在磁悬浮的状态下进入晶圆处理室110内,并向升降销112的配置区域移动。而且,通过使升降销112上升,来从被搬送模块20保持的晶圆w的下方侧举起并接受该晶圆w。
67.交接了晶圆w的搬送模块20从晶圆处理室110内退避,之后,关闭闸阀121。另一方面,在晶圆处理室110内,使升降销112向下方侧下降,来将晶圆w交接至载置台111。被载置于载置台111上的晶圆w被加热器加热,经由处理气体供给部供给处理气体,另外,根据需要将处理气体等离子体化,由此执行规定的处理。
68.在通过这样预先设定的期间执行晶圆w的处理,之后停止晶圆w的加热,并且停止处理气体的供给。另外,可以根据需要向晶圆处理室110内供给冷却用气体来进行晶圆w的冷却。之后,按照与搬入时的过程相反的过程,使搬送模块20进入晶圆处理室110内,使晶圆w从晶圆处理室110经由真空搬送室120返回加载互锁室130。
69.并且,在将加载互锁室130的气氛切换为大气压气氛之后,通过大气搬送室140侧的晶圆搬送机构142将加载互锁室130内的晶圆w取出并送回规定的承载件c。
70.参照图5~图8来说明在以上进行了说明的晶圆w的处理中检测搬送模块20的实际的移动路径41相对于设定路径40的偏离的大小并校正偏离的方法的例子。
71.图5是将图1所记载的设置于晶圆处理系统100的真空搬送室120提取出来放大地进行了图示的俯视图。设为在该真空搬送室120内针对以将狭缝21的开口朝向加载互锁室130侧的方式配置的搬送模块20设定有虚线所示的设定路径40。
72.图5中例示的设定路径40被设定为:从与配置于中央的加载互锁室130相向的位置p1朝向后方侧直进,在后部侧的配置有晶圆处理室110(闸阀121)的位置p2朝向左侧改变行进方向。之后,在移动至与后部左侧的晶圆处理室110相向的位置p3之后,使搬送模块20绕图6中的单点划线所示的中心轴向右旋转90
°
,从而以将狭缝21的开口朝向晶圆处理室110侧的状态停止。
73.针对上述的设定路径40,实际上按照图5中的实线的箭头所示的移动路径41一边相对于行进方向左右地振动一边移动。此外,为了使说明简单,在搬送模块20中不考虑图6中的实线的箭头所示的上下方向的振动、搬送模块20的主体的绕x
’‑y’‑
z’各轴的转动运动。
74.图7的(a)~(e)的横轴表示达到图5的位置p1~p2~p3的设定路径40上的各位置。图7的(a)的纵轴表示实际的移动路径41相对于设定路径40的在与行进方向正交的方向上的偏离幅度δg。另外,图7的(b)的纵轴表示针对搬送模块20设定的副坐标的x’轴方向的速度v
x’,图7的(c)的纵轴表示x’轴方向的加速度a
x’。并且,图7的(d)的纵轴表示所述副坐标
的y’轴方向上的速度v
y’,图7的(e)的纵轴表示y’轴方向的加速度a
y’。此外,在这些图中未示出位置p3处的搬送模块20的旋转动作。
75.根据图7的(b),在位置p1~p2的移动中,在沿着行进方向(x’轴方向)的方向上,搬送模块20在以大致固定的加速度加速之后匀速移动,并且在减速时以与加速时的加速度大致同样大小的加速度减速。其结果是,如图7的(c)所示,在设置于搬送模块20的加速度传感器22中检测出在搬送模块20朝向行进方向加速时和减速时所作用的加速度。
76.另一方面,如图7的(d)所示,实际的移动路径41相对于设定路径40的偏离表现为搬送模块20的在与行进方向交叉的方向(y’轴方向)上的速度变化。并且,该速度变化被加速度传感器22检测为与行进方向交叉的方向上的加速度的变化(图7的(e))。
77.并且,在位置p2~p3的移动中也是,在沿着行进方向(y’轴方向)的方向上,通过加速度传感器22检测出在搬送模块20朝向行进方向加速时和减速时所作用的加速度(图7的(e))。另外,实际的移动路径41的偏离的影响被加速度传感器22检测为与行进方向交叉的方向(x’轴方向)上的加速度的变化(图7的(c))。
78.像这样,在直进移动中,实际的移动路径41相对于设定路径40的偏离能够被加速度传感器22检测为与行进方向交叉的方向上的加速度的变化。该加速度是表示在与沿着设定路径40的方向交叉的方向上作用的力即外力的大小的指标值。如已述的那样,该外力包括基于构成区块10、搬送模块20的设备的各种误差原因产生的力。
79.因此,本例的校正参数计算部502基于保持有晶圆w的状态的搬送模块20的重量m以及与行进方向交叉的方向上的加速度a来求出外力f(=ma)。并且,校正参数计算部502计算与所述外力对应的大小的校正力来作为校正参数,并且将其输出至控制部501。搬送控制部501以使在搬送模块20的模块侧磁体23产生的磁力相比于获取前述的加速度a时的该磁力朝向抵消前述的偏离的方向增大与校正力相应的量的方式进行改变通过移动面侧线圈11形成的磁场的状态的校正。
80.具体地说,与在以没有外力的影响为前提使搬送模块20沿设定路径40移动的情况下形成的磁场相比较,在移动路径41的各位置处形成使在模块侧磁体23产生的磁力朝向抵消偏离的方向增大与校正力相应的量的磁场。通过调节已述的各种操作变量(对作为供给电力的对象的移动面侧线圈11的选择、供电量、供电方向的切换等)来调节磁场。
81.图8表示校正参数的计算方法的一例。图8的横轴表示搬送模块20的设定路径40的各位置。另外,图8的(a)的纵轴表示在与设定路径40的行进方向交叉的方向上作用的加速度a,图8的(b)表示校正力f’。
82.在图8的(a)的例子中,确定加速度a的方向(外力的方向)发生变化的位置q1~q4,求出通过这些位置的期间的平均加速度a
av
(1)~a
av
(3)。而且,根据这些平均加速度a
av
和搬送模块20的重量m来计算在抵消偏离的方向上作用的校正力f’(=ma
av
)。另外,也可以是,以比图8所示的例子短的位置间隔、时间间隔求出加速度a的平均值,来提高校正力f’的分辨率。
83.在以上所说明的校正参数(校正力)的计算以及改变通过移动面侧线圈11形成的磁场的状态的校正也能够应用于使用图5、图7进行了说明的副坐标的x’、y’轴方向上的偏离之外的情况。
84.例如,针对图6所示的z’轴方向上的移动路径41的偏离,也能够基于与搬送模块20
的行进方向交叉的所述z’轴方向的加速度的变化来计算校正参数。
85.另外,也能够针对如纵波那样的沿着搬送模块20的行进方向的移动速度的变化计算校正参数。例如,求出按照设定沿设定路径40进行了加速和减速的情况下的加速度的变化与在实际的移动路径41中检测出的加速度的变化的差分值δa。而且,根据该差分值和搬送模块20的重量m,来计算校正力f’(=mδa)。
86.并且,不仅针对使搬送模块20直进移动的情况,针对进行曲线运动的情况下的偏离的校正也能够针对应用上述的方法。在该情况下,在曲线的设定路径40的各位置处检测在与该曲线的切线方向正交的法线方向上作用的加速度的变化。但是,在曲线运动的情况下,在沿设定路径40移动的搬送模块20中还检测在所述法线方向上作用的加速度。
87.因而,在设定路径40的各位置处求出通过加速度传感器22检测出的加速度与假定在搬送模块20沿设定路径40移动了的情况下会检测出的加速度的差分值δa。而且,根据该差分值和搬送模块20的重量m,来计算校正力f’(=mδa)。
88.并且,针对搬送模块20的绕图6所示的各副坐标的旋转动作,也能够检测与该旋转动作有关的、搬送模块20的实际的移动路径41相对于设定路径40的偏离的大小,并校正偏离。作为设定路径40的例子,能够列举图5的绕位置p3的90
°
的旋转轨道r。在该情况下,例如在区块10的不同的位置处设置多个加速度传感器22,根据通过各加速度传感器22检测出的加速度的大小和方向,能够求出搬送模块20的旋转轴的位置和绕该旋转轴的角速度。
89.而且,通过多个加速度传感器22检测与设定路径40交叉的方向的角加速度(在旋转轨道r的情况下为绕与z’轴正交的x’轴、y’轴的旋转运动所涉及的角加速度)来作为指标值。而且,校正参数计算部502基于所述交叉的方向的角加速度α、根据搬送模块20的形状、构成构件的密度分布、旋转轴的位置决定的惯性力矩i,能够计算用于校正所述偏离的校正力矩力n的大小n(=iα)。
90.搬送控制部501以使在模块侧磁体23产生的磁力相比于获取前述的角加速度α取时的该磁力朝向抵消前述的偏离的方向增大与校正力矩力相应的量的方式进行改变通过移动面侧线圈11形成的磁场的状态的校正。
91.接着,说明实施上述的校正的定时的例子。第一,能够例示设置试移动期间的情况,所述试移动期间在开始晶圆处理室110中进行晶圆w的处理之前仅执行搬送模块20的沿着设定路径40的移动动作的期间。在试移动期间,可以使搬送模块20一边实际地搬送晶圆w一边在设定路径40中移动。
92.在该情况下,关于所述试移动期间中的搬送模块20的移动动作,通过加速度传感器22来进行指标值(加速度、角加速度)的检测。校正参数计算部502基于在试移动期间检测出的指标值,通过已述的方法来计算校正参数。
93.而且,在处理期间,搬送控制部501基于计算出的校正参数,以进行已述的偏离的校正的方式进行改变磁场的状态的校正,所述处理期间是试移动期间结束且在晶圆处理室110中进行晶圆w的处理的期间。
94.第二,能够例示如下情况:通过在处理期间使搬送模块20沿设定路径40移动的一个移动动作来进行通过加速度传感器22进行的指标值的检测,所述处理期间是在晶圆处理室110中进行晶圆w的处理的期间。校正参数计算部502基于在该一个移动动作中检测出的指标值来,通过已述的方法来计算校正参数。此时,可以在多次移动动作中进行指标值的检
测,并采用这些指标值的平均值来作为所述一个移动动作的指标值。
95.在上述的一个移动动作之后使搬送模块20沿相同的设定路径40移动的其它移动动作中,校正参数计算部502基于计算出的校正参数,以进行已述的偏离的校正的方式进行改变磁场的状态的校正。
96.根据本实施方式所涉及的晶圆搬送装置101,能够使搬送模块20更准确地沿预先设定的设定路径移动。其结果是,能够避免在使搬送模块20高速移动时与其它搬送模块20、设备之间接触。
97.在此,作为与作用于搬送模块20的力的大小对应的指标值,不限于检测搬送模块20向与沿着设定路径40的方向交叉的方向移动的加速度的大小的情况。
98.例如,也可以检测实际的移动路径41相对于设定路径40的偏离幅度,并将其设为指标值。在该情况下,构成检测部的传感器可以采用拍摄移动面内的搬送模块20的位置的摄像机、从区块10侧检测搬送模块20的位置的霍尔传感器。另外,可以由基于距激光束的照射位置的距离来检测搬送模块20的位置的激光位移计构成检测部。通过检测搬送模块20的位置,能够确定实际的移动路径41,并求出相对于设定路径40的偏离幅度。
99.此时,搬送控制部501求出加速度,该加速度是检测出的所述偏离幅度的随时间的变化的二阶时间微分值。并且,搬送控制部501基于该加速度来计算与沿所述交叉的方向作用于搬送模块20的外力对应的大小的校正力,并将其设为校正参数。而且,校正参数计算部502以使作用于模块侧磁体23的磁力相比于获取偏离幅度时的该磁力朝向抵消所述偏离的方向增大与所述校正力相应的量的方式进行已述的校正。
100.在此,搬送模块20还能够构成为:能够在以改变距区块10的移动面的距离的方式悬浮的状态下移动。在该情况下,可以改变搬送模块20的距移动面的距离来将已述的各种指标值的检测实施多次。
101.校正参数计算部502能够基于在距移动面的距离不同的条件下检测出的这些指标值的变化,通过内插或外插来估计预先设定的距所述移动面的距离的指标值。校正参数计算部502能够基于该估计结果来计算与所述预先设定的距所述移动面的距离相应的校正参数。
102.另外,搬送模块20还能够构成为:除了如已述那样进行晶圆w的搬送以外,还能够搬送例如晶圆处理室110内的更换部件等重量与晶圆w的重量不同的搬送对象物。在该情况下,可以改变施加于搬送模块20的荷重来将已述的各种指标值的检测实施多次。
103.校正参数计算部502能够基于在荷重不同的条件下检测出的这些指标值的变化,通过内插或外插来估计通过搬送模块20搬送的搬送对象物的重量的指标值。校正参数计算部502能够基于该估计结果来计算与通过搬送模块20搬送的搬送对象物的重量相应的校正参数。
104.在使用图1~图6进行了说明的实施方式中,说明了在加载互锁室130、真空搬送室120以及晶圆处理室110的底面侧配置区块10并使搬送模块20在水平的移动面上磁悬浮的结构例。但是,移动面不限于水平的情况,也可以为倾斜面、垂直面。在该情况下也是,搬送模块20的加速度传感器22受到作用于与区块10侧的移动面侧线圈11的磁场之间的斥力和引力中的至少一方的磁力的作用,从而在从移动面浮起的状态下移动。
105.而且,关于在这些倾斜面、垂直面中移动的搬送模块20也是,能够基于检测部对搬
送模块20的加速度、相对于设定路径40的偏离幅度等指标值进行的检测、校正参数计算部502进行的校正参数的计算、搬送控制部501的校正参数,来进行改变通过移动面侧线圈11形成的磁场的状态的校正。
106.并且,能够应用本公开的技术的搬送模块20的结构不限于图2、图3等所记载的结构。例如,也可以使用具有圆板状的外观形状来代替方板状的外观形状的搬送模块20。
107.另外,可以设为以从设置有模块侧磁体23的方板状或圆板状的搬送模块20的主体朝向侧方延伸的方式设置叉构件并在该叉构件上保持晶圆w的结构。在该情况下,即使不在晶圆处理室110、加载互锁室130内设置区块10,也能够使叉构件进入来进行晶圆w的交接。
108.应当认为,本次公开的实施方式在所有方面均为例示,而非限制性的。上述的实施方式在不脱离所附的权利要求书及其主旨的情况下可以以各种方式进行省略、置换、变更。
109.附图标记说明
110.w:晶圆;10:区块;11:移动面侧线圈;101:晶圆搬送装置;100:晶圆处理系统;110:晶圆处理室;120:真空搬送室;20:搬送模块;22:加速度传感器;23:模块侧磁体;501:搬送控制部;502:校正参数计算部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1