悬吊式暂存装置、水平调节系统、水平调节方法与流程
1.本公开涉及半导体技术领域,本公开涉及但不限于一种悬吊式暂存装置、水平调节系统、水平调节方法。
背景技术:
2.半导体集成电路中的自动物料搬送系统(automated material handling system,amhs)包括沿着在安装面的轨道上行走的天车(overhead hoist transport,oht)以及设置于安装面下方的悬吊式暂存装置(over head buffer,ohb)。其中,悬吊式暂存装置为一种存储棚位,用于存放前置式晶圆传送盒(front opening unified pod,foup),天车用于将foup运送至目的地站点。
3.在安装好悬吊式暂存装置时以及后期使用过程中,需要对悬吊式暂存装置进行水平值的调节。然而目前调节悬吊式暂存装置的水平值的方法需要浪费人力,耗时较长且效率低。
技术实现要素:
4.本公开实施例提供一种悬吊式暂存装置、水平调节系统、水平调节方法。
5.第一方面,本公开实施例提供一种悬吊式暂存装置,包括:多个连接部件、用于放置被承载对象的承载部件以及控制器;每一所述连接部件包括:固定组件、第一连接组件、伸缩组件以及第二连接组件,其中:所述固定组件,设置于安装面上;所述第一连接组件的两端分别与所述固定组件和所述伸缩组件连接;所述第二连接组件的两端分别与所述伸缩组件和所述承载部件连接;所述伸缩组件的两端分别与所述第一连接组件和所述第二连接组件连接,所述伸缩组件与所述控制器电性连接,用于响应于所述控制器发送的电信号,调节所述连接部件的长度。
6.在一些实施例中,所述伸缩组件包括:压电陶瓷组件。
7.在一些实施例中,所述悬吊式暂存装置包括4个所述连接部件,所述承载部件的朝向所述安装面的表面包括4个区域,4个所述连接部件中的第二连接组件分别与所述4个区域相连接,4个连接位置点形成的封闭四边形为方形。
8.第二方面,本公开实施例提供一种悬吊式暂存装置的水平调节系统,包括:校核部件和如上述任一实施例中的悬吊式暂存装置,其中:所述校核部件,设置于所述承载部件上,用于测量所述悬吊式暂存装置的水平值;所述控制器,还用于获取所述水平值;基于所述水平值与预设的水平参考值的关系,确定每一所述连接部件中伸缩组件的待调整的伸缩量;基于每一所述连接部件中伸缩组件的待调整的伸缩量向对应伸缩组件发送电信号,以调节所述悬吊式暂存装置的水平值。
9.在一些实施例中,所述校核部件包括:部件本体;水平测量单元,设置于所述部件本体内,用于测量所述悬吊式暂存装置的水平值;载荷传感单元,内嵌设置于所述部件本体朝向所述承载部件的表面上,用于检测所述部件本体是否被放置在所述悬吊式暂存装置的
承载部件上;存储单元,设置于所述部件本体内,且与所述水平测量单元和所述载荷传感单元电性连接,用于在所述载荷传感单元检测到所述部件本体被放置在所述承载部件上时,存储所述水平测量单元测量的水平值。
10.在一些实施例中,所述水平调节系统还包括:搬运部件,用于将所述校核部件搬运至所述悬吊式暂存装置中;所述控制器,还用于控制所述搬运部件将所述校核部件搬运至所述悬吊式暂存装置中。
11.在一些实施例中,所述搬运部件包括驱动单元和控制单元,其中:所述控制单元,用于向所述驱动单元发送搬运指令,以及在所述载荷传感单元检测到所述部件本体被放置在所述承载部件上时,从所述存储单元获取所述水平值;所述驱动单元,用于响应于所述控制单元发送的所述搬运指令,将所述校核部件搬运至所述悬吊式暂存装置中。
12.在一些实施例中,所述水平调节系统还包括:接收器和网络交换机;其中,所述接收器,用于接收所述控制单元发送的所述水平值,并将所述水平值传输至所述网络交换机;所述网络交换机,用于将所述接收器传输的所述水平值传输至所述控制器。
13.在一些实施例中,所述水平调节系统还包括:与所述控制器电性连接的电源组件,用于向所述伸缩组件施加电压。
14.在一些实施例中,所述控制器,还用于向所述电源组件发送控制信号,所述控制信号用于控制所述电源组件向所述伸缩组件施加电压;所述电源组件,用于响应于所述控制信号,向所述伸缩组件施加电压;所述水平调节系统还包括:两端分别与所述电源组件和所述伸缩组件电性连接的增益组件,用于将所述电源组件输出的电压放大至所述伸缩组件所需的电压。
15.第三方面,本公开实施例提供一种悬吊式暂存装置的水平调节方法,利用上述任一实施例中的悬吊式暂存装置的水平调节系统实现,所述方法包括:对待调节的悬吊式暂存装置至少执行一次如下循环步骤,直至调节后的悬吊式暂存装置的水平值位于预设的水平参考值的范围内:获取测量的所述悬吊式暂存装置的水平值;基于所述水平值与所述预设的水平参考值的关系,确定所述水平调节系统中每一伸缩组件的待调整的伸缩量;基于每一所述伸缩组件的待调整的伸缩量,向对应伸缩组件发送电信号,通过调节所述伸缩组件的长度,实现调节所述悬吊式暂存装置的水平值。
16.在一些实施例中,基于所述水平值与所述预设的水平参考值的关系,确定所述水平调节系统中每一伸缩组件的待调整的伸缩量,包括:基于所述水平值与所述预设的水平参考值的关系,从所述水平调节系统中的多个所述伸缩组件中确定待调整的目标伸缩组件以及所述目标伸缩组件的待调整的伸缩量。
17.在一些实施例中,所述方法还包括:获取待调节的悬吊式暂存装置队列;对所述待调节的悬吊式暂存装置队列中每一悬吊式暂存装置依次执行上述循环步骤,直至调节后的悬吊式暂存装置的水平值位于所述预设的水平参考值的范围内。
18.在一些实施例中,所述方法还包括:基于所述悬吊式暂存装置的工作状态和/或校核周期,确定所述待调节的悬吊式暂存装置队列;其中,所述工作状态包括:正常状态和异常状态。
19.在一些实施例中,所述方法还包括:基于所述待调节的悬吊式暂存装置队列确定校核路径;基于所述校核路径,向所述搬运部件发送搬运指令,所述搬运指令用于控制所述
搬运部件按照所述校核路径将所述校核部件搬运至所述悬吊式暂存装置中。
20.在一些实施例中,所述方法还包括:在调节后的悬吊式暂存装置的水平值位于所述预设的水平参考值的范围内时,控制所述搬运部件将所述校核部件搬离所述悬吊式暂存装置。
21.本公开实施例中,伸缩组件可以响应于控制器发送的电信号产生对应的形变,因此可以实现对连接部件的长度的自动调节,从而可以实现对悬吊式暂存装置的水平值的自动调节,无需依靠人力登高去调整,从而可以节省人力,提高作业效率。
附图说明
22.在附图(其不一定是按比例绘制的)中,相似的附图标记可在不同的视图中描述相似的部件。具有不同字母后缀的相似附图标记可表示相似部件的不同示例。附图以示例而非限制的方式大体示出了本文中所讨论的各个实施例。
23.图1为本公开实施例提供的一种悬吊式暂存装置的组成结构示意图一;图2为本公开实施例提供的一种悬吊式暂存装置的组成结构示意图二;图3为本公开实施例提供的一种伸缩组件的组成结构示意图;图4为本公开实施例提供的一种伸缩组件在电场作用下发生形变的示意图;图5为本公开实施例提供的一种悬吊式暂存装置的组成结构示意图三;图6为本公开实施例提供的一种悬吊式暂存装置的水平调节系统的组成结构示意图一;图7为本公开实施例提供的一种悬吊式暂存装置的水平调节系统中的校核部件的组成结构示意图;图8为本公开实施例提供的一种悬吊式暂存装置的水平调节系统的组成结构示意图二;图9为本公开实施例提供的一种悬吊式暂存装置的水平调节系统的组成结构示意图三;图10为本公开实施例提供的一种悬吊式暂存装置的水平调节系统的组成结构示意图四;图11为本公开实施例提供的一种悬吊式暂存装置的水平调节系统的组成结构示意图五;图12为本公开实施例提供的一种悬吊式暂存装置的水平调节系统的组成框架示意图;图13为本公开实施例提供的一种悬吊式暂存装置的水平调节方法的实现流程示意图;图14为本公开实施例提供的另一种悬吊式暂存装置的水平调节方法的实现流程示意图;图15为本公开实施例提供的又一种悬吊式暂存装置的水平调节方法的实现流程示意图。
具体实施方式
24.下面将参照附图更详细地描述本公开公开的示例性实施方式。虽然附图中显示了本公开的示例性实施方式,然而应当理解,可以以各种形式实现本公开,而不应被这里阐述的具体实施方式所限制。相反,提供这些实施方式是为了能够更透彻地理解本公开,并且能够将本公开公开的范围完整的传达给本领域的技术人员。
25.在下文的描述中,给出了大量具体的细节以便提供对本公开更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本公开可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本公开发生混淆,对于本领域公知的一些技术特征未进行描述;即,这里不描述实际实施例的全部特征,不详细描述公知的功能和结构。
26.在附图中,为了清楚,层、区、元件的尺寸以及其相对尺寸可能被夸大。自始至终相同附图标记表示相同的元件。
27.应当明白,当元件或层被称为“在
……
上”、“与
……
相邻”、“连接到”或“耦合到”其它元件或层时,其可以直接地在其它元件或层上、与之相邻、连接或耦合到其它元件或层,或者可以存在居间的元件或层。相反,当元件被称为“直接在
……
上”、“与
……
直接相邻”、“直接连接到”或“直接耦合到”其它元件或层时,则不存在居间的元件或层。应当明白,尽管可使用术语第一、第二、第三等描述各种元件、部件、区、层和/或部分,这些元件、部件、区、层和/或部分不应当被这些术语限制。这些术语仅仅用来区分一个元件、部件、区、层或部分与另一个元件、部件、区、层或部分。因此,在不脱离本公开教导之下,下面讨论的第一元件、部件、区、层或部分可表示为第二元件、部件、区、层或部分。而当讨论的第二元件、部件、区、层或部分时,并不表明本公开必然存在第一元件、部件、区、层或部分。
28.在此使用的术语的目的仅在于描述具体实施例并且不作为本公开的限制。在此使用时,单数形式的“一”、“一个”和“所述/该”也意图包括复数形式,除非上下文清楚指出另外的方式。还应明白术语“组成”和/或“包括”,当在该说明书中使用时,确定所述特征、整数、步骤、操作、元件和/或部件的存在,但不排除一个或更多其它的特征、整数、步骤、操作、元件、部件和/或组的存在或添加。在此使用时,术语“和/或”包括相关所列项目的任何及所有组合。
29.在新的半导体厂建设时期安装好悬吊式暂存装置后,会对悬吊式暂存装置的水平值进行规范性调节;已经投入使用的悬吊式暂存装置经过长时间使用后,水平值也会发生微小变化,导致悬吊式暂存装置取放foup时发生报错,从而影响生产。因此,需要定期对悬吊式暂存装置的水平值进行检查及维护调节。
30.目前,调节悬吊式暂存装置的水平值的方法通常是通过人力登高使用水平仪来检查并基于检查结果进行调节,一般通过调节悬吊式暂存装置中的螺母来调节水平值,且同一位置往往需要重复检查及调节才可以完成,这样不但极其浪费人力而且效率特别低。
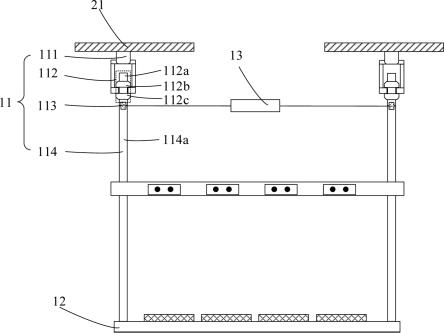
31.有鉴于此,本公开实施例提供一种悬吊式暂存装置,参考图1,包括:多个连接部件11、用于放置被承载对象的承载部件12以及控制器13。其中:每一连接部件11包括:固定组件111、第一连接组件112、伸缩组件113以及第二连接组件114。其中:固定组件111,设置于安装面21上。
32.第一连接组件112的两端分别与固定组件111和伸缩组件113连接。
33.第二连接组件114的两端分别与伸缩组件113和承载部件12连接。
34.伸缩组件113的两端分别与第一连接组件112和第二连接组件114连接,伸缩组件113与控制器13电性连接,用于响应于控制器13发送的电信号,调节连接部件11的长度。
35.这里,多个连接部件可以是三个连接部件、四个连接部件、或更多个连接部件。被承载对象可以是foup,也可以是水平测量单元或者是载荷传感单元等等。安装面可以是与固定组件上端固定连接的表面,例如,可以是天花板。
36.本公开实施例中的悬吊式暂存装置可以用来承载foup,foup可以保护晶圆在每一台生产机台之间的传送过程中,晶圆不受外部环境的微尘污染,进而促进良率提升。若foup中的晶圆未能立刻被搬运至生产机台进行下一道工序,还可以在悬吊式暂存装置中充氮气来使晶圆所处环境符合要求。
37.在实施时,参考图1,固定组件111用于将连接部件11固定在安装面21上,实现时,固定组件111可以是一个吊扣,吊扣的下端具有一开口。第一连接组件112可以包括第一螺杆112a、第一螺母112b和第二螺母112c,第一螺杆112a的上端穿过吊扣的开口,并通过上下排布的第一螺母112b和第二螺母112c将第一螺杆112a的上端与吊扣紧固在一起,第一螺杆112a的下端连接伸缩组件113的一端。第二连接组件114可以包括第二螺杆114a,第二螺杆114a的上端与伸缩组件113的另一端连接,第二螺杆114a的下端与承载部件12连接。
38.在实施时,可以将伸缩组件分别与第一螺杆的下端和第二螺杆的上端固定连接,例如粘接或螺栓连接。
39.在一些实施例中,参考图2,第二连接组件114还可以包括设置在第二螺杆114a上的第三螺母114b、第四螺母114c、连接杆114d和吊杆114e。其中,连接杆114d的形状为“类7”状,第三螺母114b和第四螺母114c将连接杆114d的上端与第二螺杆114a紧固在一起,连接杆114d的下端固定连接吊杆114e的一端,吊杆114e的另一端与承载部件12连接。
40.本公开实施例中,伸缩组件可以响应于控制器发送的电信号产生对应上下维度的形变,因此可以实现对连接部件的长度的自动调节,从而可以实现对悬吊式暂存装置的水平值的自动调节,无需依靠人力登高去调整,从而可以节省人力,提高作业效率。
41.伸缩组件需要能够响应于控制器发送的电信号并产生形变(应变)。压电陶瓷是一种新型位移材料,压电陶瓷的逆压电效应让压电陶瓷在电场的作用下产生应变,在电场不是很强时应变的大小和电场的大小成线性关系。在一些实施例中,伸缩组件113包括:压电陶瓷组件。控制器发送的电信号可以用于表征施加在压电陶瓷组件两侧的电压的大小,通过控制施加在压电陶瓷组件两侧的电压的大小,就可以控制压电陶瓷组件的伸缩量,从而实现对悬吊式暂存装置的水平值的调整。
42.压电陶瓷组件可以包括多个堆叠的压电陶瓷单元组件,图3中以单个压电陶瓷单元组件为示例进行说明。参考图3,每个压电陶瓷单元组件可以包括压电陶瓷片1131、在压电陶瓷片1131的上下表面分别设置的第一导电极板1132和第二导电极板1133,在第一导电极板1132和第二导电极板1133的两端连接的电源组件31。本公开实施例中的压电陶瓷组件也可以称为压电陶瓷堆或压电陶瓷堆栈,多个堆叠的压电陶瓷单元组件组成的压电陶瓷组件可以类比得出:两端的导电极板分别连接电源组件31。
43.压电陶瓷组件具有稳定性好,响应速度快,位移分辨率高,机电转化效率高,驱动力大等优点;同时压电陶瓷组件的伸缩量是连续可逆调节的,可以通过一次或多次的调整
使多个连接部件的长度相同。在实施时,压电陶瓷组件采用的材料可以是锆钛酸铅陶,也可以是钛酸钡陶瓷,这两种材料制成的压电陶瓷组件具有工作频率较宽,稳定性良好,易于批量生产的优点。
44.在实施时,参考图3,在第一导电极板1132和第二导电极板1133的两端连接电源组件31,或者多个堆叠的压电陶瓷单元组件组成的压电陶瓷组件的两端的导电极板分别连接电源组件31。控制器,还用于向电源组件31发送控制信号,控制信号用于控制电源组件31向压电陶瓷组件施加电压;电源组件31,用于响应于控制信号,通过两端的导电极板向压电陶瓷组件施加电压。
45.在一些实施例中,继续参考图3,还可以在电源组件31与一端的导电极板(如第一导电极板1132)之间设置开关32。
46.控制器,还用于控制开关32处于打开或关闭状态。在开关32处于打开状态时,电源组件31才能向压电陶瓷组件施加电场。
47.参考图4,施加电场后,压电陶瓷组件会产生沿着电场方向的相应形变,以调节连接部件的长度。
48.在一些实施例中,参考图5,悬吊式暂存装置包括4个连接部件11,承载部件12的朝向安装面21的表面包括4个区域a
´
、b
´
、c
´
和d
´
,4个连接部件11中的第二连接组件114分别与4个区域a
´
、b
´
、c
´
和d
´
相连接。其中,a
´
和d
´
(b
´
和c
´
)沿x轴方向排列,a
´
和b
´
(d
´
和c
´
)沿y轴方向排列。
49.在一些实施例中,4个连接部件中的第二连接组件与4个区域a
´
、b
´
、c
´
和d
´
的4个连接位置点形成的封闭四边形可以为方形,例如,可以为正方形或者矩形。这样,4个第二连接组件受力比较均衡;同时承载对象可以整齐地排列在承载部件的表面上,后续搬运部件在搬运承载对象时搬运路径较为简单。在实施时,这四个区域可以是承载部件的表面的四个顶角区域,也可以是非顶角区域。四个区域是承载部件表面的四个顶角区域,相较于四个区域是承载部件表面的四个非顶角区域,不仅可以预留出更多的空间来放置被承载对象,而且连接部件不会阻碍搬运部件搬运校核部件。
50.在一些实施例中,继续参考图5,4个固定组件111与安装面21的连接区域分别为a、b、c和d,并且4个固定组件111与四个连接区域a、b、c和d的4个连接位置点形成的封闭四边形可以为方形,例如,可以为正方形或者矩形,也可以为其他形状。
51.本公开实施例提供一种悬吊式暂存装置的水平调节系统,参考图6,包括校核部件41和上述任一实施例中的悬吊式暂存装置。其中:校核部件41,设置于承载部件12上,用于测量悬吊式暂存装置的水平值。一种实施方式中,校核部件41还对测量的水平值进行存储。
52.控制器13,还用于获取水平值;并基于水平值与预设的水平参考值的关系,确定每一连接部件11中伸缩组件113的待调整的伸缩量;基于每一连接部件11中伸缩组件113的待调整的伸缩量向对应伸缩组件113发送电信号,调节悬吊式暂存装置的水平值。
53.在实施时,承载部件12上可以包括至少一个棚位121,校核部件41作为被承载对象,可以位于棚位121中。校核部件虽然有重量,但是对该悬吊式暂存装置的水平影响度很小可以忽略,也可以通过对后续的水平测量单元的设置初始化来校准校核部件自重对水平值的影响,具体的校准方法为本领域技术人员所熟知,在此不再赘述。
54.本公开实施例中,校核部件会自动测量悬吊式暂存装置的水平值并对测量的水平值进行存储,控制器会获取水平值并基于水平值与预设的水平参考值之间的关系,调整每一连接部件的长度,以调节悬吊式暂存装置的水平值。也就是说,当校核部件测量的水平值不在预设的水平参考值范围内时,该水平调节系统能够实现将悬吊式暂存装置的水平值调整至预设的水平参考值范围内。如此,不仅可以同时实现对悬吊式暂存装置的水平值的自动测量与校核,从而节省人力并提高作业效率,还可以减少人为误差,提高水平值调整的精确度。
55.可以理解的是,校核部件可以一直放置在待调节的悬吊式暂存装置上,所以一直测量的都是悬吊式暂存装置的水平值。在一些实施例中,校核部件可以仅测量但不存储水平值,而将测量的水平值发送给控制器,所以校核部件可以仅包括水平测量单元。在另一些实施例中,校核部件还可以具有数据存储功能,实施时,可以存储预设次数的水平值,或者存储一个周期内的水平值,或者长期存储水平值。因此,校核部件除了水平测量单元外,还可以包括存储单元。
56.在一些实施例中,参考图7,校核部件41包括部件本体411、水平测量单元412、存储单元413和载荷传感单元414。其中:水平测量单元412,设置于部件本体411内,用于测量悬吊式暂存装置的水平值。
57.存储单元413,设置于部件本体411内,且与水平测量单元412和载荷传感单元414电性连接,用于在载荷传感单元414检测到部件本体411或校核部件41被放置在承载部件上时,存储水平测量单元412测量的水平值。
58.载荷传感单元414,内嵌设置于部件本体411朝向承载部件的表面上,用于检测部件本体411或校核部件41是否被放置在悬吊式暂存装置的承载部件上。
59.一种实施例中,水平测量单元412可以设置于部件本体411背离承载部件的表面上,即内底面上。
60.实施时,载荷传感单元414可以内嵌于部件本体411的底表面上,载荷传感单元414与存储单元413电性连接。在校核部件41被搬运至承载部件上后,载荷传感单元414会因校核部件41或部件本体411自身重力影响而被触发。当载荷传感单元414被触发后,水平测量单元412测量的悬吊式暂存装置的水平值会存储于存储单元413。
61.在实施时,水平测量单元可以是水平测量仪、水准仪等,其可用于测量相对于水平位置的倾斜角、机床类设备导轨的平面度和直线度、设备安装的水平位置和垂直位置等,可以是能够实现上述功能的各种测量设备。
62.其中,测量的水平值可以是表征承载部件所在的平面的倾斜角度,即承载部件所在的平面的水平偏离量。其中,倾斜角度与伸缩组件的待调整的伸缩量之间满足预设关系。基于该预设关系和测量的倾斜角度,可以定位到目标伸缩组件,并计算得到目标伸缩组件的待调整的伸缩量。
63.一种实施方式中,载荷传感单元可以是压力载荷传感器。部件本体可以是一个可以容纳水平测量单元、存储单元和载荷传感单元的任一腔体;例如,部件本体可以是amhs中的foup,也就是说校核部件可以是在amhs中的foup中装配水平测量单元如水平测量仪、载荷传感单元如压力荷载传感器、存储单元之后形成的。
64.可以理解的是,校核部件可以由搬运部件例如天车或者机械臂,搬运至待调节的
悬吊式暂存装置中。由于在搬运过程中,校核部件测量的水平值并不是待调节的悬吊式暂存装置的水平值,而是在搬运过程中校核部件自身的水平值。所以,需要在确定校核部件被放置在待调节的悬吊式暂存装置中之后,才能将水平值发送给控制器。因此,校核部件还可以包括载荷传感单元,用于确定校核部件是否被放置在待调节的悬吊式暂存装置中。当载荷传感单元检测到校核部件被放置在(待调节的)悬吊式暂存装置的承载部件上时,即校核部件被搬运至悬吊式暂存装置中时或者悬吊式暂存装置中已经有校核部件时,水平测量单元才将测量的水平值传送给存储单元。如此,可以减少存储单元存储无用的数据。
65.在一些实施例中,同时参考图7和图8,水平调节系统还包括:搬运部件51,用于将校核部件41搬运至悬吊式暂存装置中;控制器13,还用于控制搬运部件51将校核部件41搬运至悬吊式暂存装置中。
66.在一些实施例中,控制器13可以向搬运部件51发送搬运指令,所述搬运指令用于控制搬运部件51将校核部件41搬运至悬吊式暂存装置中。
67.在一些实施例中,搬运部件可以是天车,也可以是机械臂,图8示出的搬运部件51是天车。控制器13可以直接控制天车将校核部件41搬运至悬吊式暂存装置中。控制器13可以从存储单元413中获取悬吊式暂存装置的水平值,并基于水平值与预设的水平参考值的关系,确定每一连接部件中伸缩组件的待调整的伸缩量,基于每一连接部件中伸缩组件的待调整的伸缩量向对应伸缩组件发送电信号,调节悬吊式暂存装置的水平值。如此,无需悬吊式暂存装置的棚位中在水平值测量和调节之前就具有校核部件,不会影响悬吊式暂存装置的正常使用。
68.在其他实施例中,继续参考图8,搬运部件51可以包括驱动单元511和控制单元512,其中:控制单元512,用于向驱动单元511发送搬运指令,以及在载荷传感单元检测到部件本体或校核部件被放置在承载部件上时,从存储单元获取水平值;驱动单元511,用于响应于控制单元512发送的搬运指令,将校核部件41搬运至悬吊式暂存装置中。
69.可以理解的是,搬运部件可以具有独立于控制器的控制单元,控制单元可以向驱动单元发送搬运指令。当搬运部件具有独立的控制单元,则需要控制单元将水平测量单元测量的水平值传输至控制器,使得控制器对水平值进行分析。在实施时,可以在控制单元和控制器之间设置接收器和网络交换机。如此,可以减小对控制器的干扰,提高控制器运行速度。
70.在一些实施例中,参考图9,水平调节系统还包括:接收器61和网络交换机71;其中:接收器61,用于接收控制单元512发送的水平值,并将水平值传输至网络交换机71;网络交换机71,用于将接收器61传输的水平值传输至控制器13。
71.在实施时,接收器可以通过无线传输或者有线传输的方式将水平值传输至网络交换机。无线传输可以采用无线局域网(wireless fidelity,wifi)传输或者蓝牙传输等。当校核部件中的水平测量单元测量到悬吊式暂存装置的水平值后,在载荷传感单元检测到校核部件被放置在承载部件上时,将水平测量单元测量的悬吊式暂存装置的水平值存储于存储单元;控制单元从存储单元获取水平值,然后控制单元将水平值传输给接收器,接收器接
收到水平值后,通过wifi或者蓝牙将水平值传输到网络交换机中,最后可以通过wifi或者蓝牙将水平值传输到控制器中。
72.在一些实施例中,参考图10,水平调节系统还包括:与控制器13电性连接的电源组件31,用于向伸缩组件113施加电压。
73.在实施时,电源组件还可以向控制器、控制单元等各用电部件进行供电,以使控制器、控制单元以及各用电部件正常工作。
74.在一些实施例中,水平调节系统还可以包括电源模块,用于对各用电部件进行供电,以使各部件正常工作。
75.在一些实施例中,控制器13,还用于向电源组件31发送控制信号,控制信号用于控制电源组件31向伸缩组件113施加电压;电源组件31,用于响应于控制信号,向伸缩组件113施加电压。
76.在实施时,可能会存在电源组件施加的电压无法达到伸缩组件所需要的电压,因此水平调节系统还可以包括:参考图11,两端分别与电源组件31和伸缩组件电性连接的增益组件81,用于将电源组件输出的电压放大至伸缩组件所需的电压。
77.参考图12来说明本公开实施例提供的悬吊式暂存装置的水平调节系统的工作过程。首先确定待校核的ohb,搬运部件51将校核部件41搬运至待校核的ohb上,校核部件41中的水平测量单元测量水平值;当载荷传感单元414检测到校核部件被放置在悬吊式暂存装置中承载部件上时,水平测量单元将测量的数据存储在存储单元中。存储单元将水平值发送给控制单元,水平值依次经过接收器61、网络交换机71传输至控制器13。控制器13基于水平值与预设的水平参考值之间的关系,确定每一连接部件中压电陶瓷组件的待调整的伸缩量;基于每一连接部件中压电陶瓷组件的待调整的伸缩量向对应的电源组件31发送控制信号,电源组件31会响应于控制信号,向对应的压电陶瓷组件施加电压,增益组件81用于将电源组件31输出的电压放大至压电陶瓷组件所需的电压。在电源组件31向压电陶瓷组件施加电压之后,压电陶瓷组件发生形变,以调节每一连接部件的长度,从而调节悬吊式暂存装置的水平值。
78.在调节悬吊式暂存装置的水平值之后,重复上述动作,直至悬吊式暂存装置的水平值满足预设的水平参考值。
79.实施时,例如参考图10,为了便于理解,将4个连接部件分别记为11a、11b、11c和11d,其中,11a和11b(11c和11d)沿y轴方向排列,11b和11c(11a和11d)沿x轴方向排列。根据测得的水平值,可以获知承载部件所在的平面的倾斜角度以及判断承载部件所在的平面在x轴或y轴上是否发生了旋转,若承载部件所在的平面沿y轴发生了旋转,可以通过调节(11a和11b)、和/或(11c和11d)的伸缩来调整水平值。若承载部件所在的平面沿x轴发生了旋转,可以通过调节(11a和11d)、和/或(11c和11b)的伸缩来调整水平值。当然也可以确定任一个连接部件中伸缩组件为待调整的目标伸缩组件,然后确定待调整的伸缩量。前述各调整方法均可通过相应调整,直至水平值位于预设的水平参考值的范围内。
80.本公开实施例还提供一种悬吊式暂存装置的水平调节系统,包括距离传感单元和上述任一实施例中的悬吊式暂存装置。其中:控制器,还用于获取每一连接部件的长度值;基于每一连接部件的长度值与预设的长度参考值的关系,确定每一连接部件中伸缩组件的待调整的伸缩量;基于每一连接部
件中伸缩组件的待调整的伸缩量向对应伸缩组件发送电信号,以调节悬吊式暂存装置中的每一连接部件的长度,最终悬吊式暂存装置中的承载部件会处于水平状态。
81.实施时,距离传感单元可以是光学距离传感器、红外距离传感器、超声波距离传感器等等。
82.距离传感单元,设置于承载部件上,用于测量每一连接部件的长度值。实施时,悬吊式暂存装置可以包括4个连接部件,承载部件的朝向安装面的表面包括4个区域,4个连接部件中的第二连接组件分别与4个区域相连接,4个连接位置点形成的封闭四边形为方形。该情况下,距离传感单元可以设置于连接位置点。
83.下面对本公开实施例中的悬吊式暂存装置的水平调节系统的工作过程进行说明。首先,距离传感单元测量第一个至第四个连接部件的长度值分别为a、b、c和d米(m),若预设的长度参考值可以为一个范围[l
1-ξ, l1+ξ]。最终将四个连接部件的长度值调整至预设的长度参考值范围内。其中,l1表示该范围的中心值,l
1-ξ表示该范围的下限,l1+ξ表示该范围的上限。例如,[l
1-ξ, l1+ξ]可以为[0.520-0.0005, 0.520+0.0005],即l1取值为0.520,ξ取值为0.0005。在此种实施方式中,水平值可以理解为是表征四个连接部件长度值的指标(a,b,c,d)。
[0084]
其次,控制器分别确定每一连接部件的长度值与预设的长度参考值之间的差值
△1、
△2、
△3和
△4,分别基于每一连接部件的长度值与预设的长度参考值之间的差值
△1、
△2、
△3和
△4,将每一连接部件对应的差值确定为对应连接部件中伸缩组件的待调整的伸缩量,即四个连接部件中伸缩组件的待调整的伸缩量可以表示为数组[
△1,
ꢀ△2,
ꢀ△3,
ꢀ△4]。之后控制器基于每一连接部件中伸缩组件的待调整的伸缩量向对应伸缩组件发送电信号,以调节悬吊式暂存装置中的每一连接部件的长度。
[0085]
本公开实施例还提供悬吊式暂存装置的水平调节方法,对待调节的悬吊式暂存装置至少执行一次如下循环步骤,直至调节后的悬吊式暂存装置中的每一连接部件长度值位于预设的长度参考值的范围内,即直至调节后的悬吊式暂存装置中的承载部件处于水平状态:步骤s11,获取测量的每一连接部件的长度值;步骤s12,基于每一连接部件的长度值与预设的长度参考值的关系,确定每一连接部件中伸缩组件的待调整的伸缩量;步骤s13,基于每一连接部件中伸缩组件的待调整的伸缩量,向对应伸缩组件发送电信号,以调节悬吊式暂存装置中的每一连接部件的长度。
[0086]
实施时,例如参考图10,为了便于理解,将4个连接部件分别记为11a、11b、11c和11d,其中,11a和11b(11c和11d)沿y轴方向排列,11b和11c(11a和11d)沿x轴方向排列。当连接部件11a和11b较长,而连接部件11c和11d较短,也就是承载部件所在的平面沿y轴发生了旋转,可以根据每一连接部件的长度值与预设的长度参考值的关系,对每一连接部件的长度值进行相应调整(即将连接部件11a、11b、11d和11c中伸缩组件确定为待调整的目标伸缩组件),直至每一连接部件的长度值符合预设的长度参考值或在预设的长度参考值范围内;也可以将连接部件11a和11b中伸缩组件确定为待调整的目标伸缩组件,待调整的伸缩量就是连接部件11a和11b分别与连接部件11d和11c的长度差,也就是需要将连接部件11a和11b的长度调整的短一些。当然也可以将连接部件11c和11d中伸缩组件确定为待调整的目标伸
缩组件,将连接部件11c和11d的长度调整的长一些,以使悬吊式暂存装置中的每一连接部件长度值位于预设的长度参考值的范围内,以使悬吊式暂存装置中的承载部件处于水平状态。
[0087]
同理,当连接部件11b和11c较长,而连接部件11a和11d较短,也就是说承载部件所在的平面沿x轴发生了旋转,可以根据每一连接部件的长度值与预设的长度参考值的关系,对每一连接部件的长度值进行相应调整(即将连接部件11a、11b、11d和11c中伸缩组件确定为待调整的目标伸缩组件),直至每一连接部件的长度值符合预设的长度参考值或在预设的长度参考值范围内;也可以将连接部件11b和11c中伸缩组件确定为待调整的目标伸缩组件,待调整的伸缩量就是连接部件11a和11d分别与连接部件11b和11c的长度差,也就是需要将连接部件11b和11c的长度调整的短一些。当然也可以将连接部件11a和11d中伸缩组件确定为待调整的目标伸缩组件,将连接部件11a和11d的长度调整的长一些,以使悬吊式暂存装置中的每一连接部件长度值位于预设的长度参考值的范围内,以使悬吊式暂存装置中的承载部件处于水平状态。也就是说,可以确定任一个连接部件中伸缩组件为待调整的目标伸缩组件,然后确定待调整的伸缩量。
[0088]
基于图10和图11提供的一种提供的悬吊式暂存装置的水平调节系统,本公开实施例提供一种悬吊式暂存装置的水平调节方法,利用上述任一实施例中的悬吊式暂存装置的水平调节系统实现,参考图13,包括:对待调节的悬吊式暂存装置至少执行一次如下循环步骤,直至调节后的悬吊式暂存装置的水平值位于预设的水平参考值的范围内:步骤s301,获取测量的悬吊式暂存装置的水平值;这里,水平值是校核部件中的水平单元测量的。
[0089]
步骤s302,基于水平值与预设的水平参考值的关系,确定水平调节系统中每一伸缩组件的待调整的伸缩量;步骤s303,基于每一伸缩组件的待调整的伸缩量,向对应伸缩组件发送电信号,通过调节伸缩组件的长度,实现调节悬吊式暂存装置的水平值。
[0090]
可以理解的是,在执行步骤s301至步骤s303时,水平调节系统中的悬吊式暂存装置中的承载部件上已经放置有校核部件,因此不需要搬运部件将校核部件搬运至悬吊式暂存装置中。
[0091]
本公开实施例中,通过重复执行步骤s301至步骤s303,控制器可以将水平值与预设的水平参考值进行对比,确定出悬吊式暂存装置中每一伸缩组件的待调整的伸缩量,之后通过调节伸缩组件的长度,从而使悬吊式暂存装置的水平值满足预设的水平参考值。如此,不仅可以实现闭环控制,也可以减少人为误差,提高调整精确度;还可以减少因悬吊式暂存装置的水平值不满足预设的水平参考值而导致的作业报错、进而影响生产进度的问题;此外,还可以节省人力,提高作业效率。
[0092]
在一些实施例中,步骤s302可以包括:基于水平值与预设的水平参考值的关系,从水平调节系统中的多个伸缩组件确定待调整的目标伸缩组件以及目标伸缩组件的待调整的伸缩量。如此,可以快速且精确地确定待调整的目标伸缩组件。
[0093]
步骤s303中,基于每一伸缩组件的待调整的伸缩量,向对应伸缩组件发送电信号,通过调节伸缩组件的长度,进而调节对应的连接部件的长度,从而实现调节悬吊式暂存装置的水平值。
[0094]
在一些实施例中,参见图14,悬吊式暂存装置的水平调节方法还包括:步骤s304,获取待调节的悬吊式暂存装置队列。
[0095]
实施时,将每一个待调节的悬吊式暂存装置按照顺序排列起来,形成待调节的悬吊式暂存装置队列,其中,队列中的每一个待调节的悬吊式暂存装置都有一个位置。
[0096]
在一些实施例中,每一个悬吊式暂存装置都可以具有标识,标识可以是二维码或者条形码。
[0097]
在另一些实施例中,可以基于悬吊式暂存装置的工作状态和/或校核周期,确定待调节的悬吊式暂存装置队列;其中,工作状态包括:正常状态和异常状态。
[0098]
例如,可以将所有工作状态为异常状态的悬吊式暂存装置按照顺序形成的队列,确定为待调整的悬吊式暂存装置队列。又例如,可以周期性地将部分或者全部悬吊式暂存装置按照顺序形成的队列,确定为待调整的悬吊式暂存装置队列。
[0099]
再如,如果周期性地将部分悬吊式暂存装置按照顺序形成的队列确定为第一队列,然后再确定所有悬吊式暂存装置中工作状态为异常状态的悬吊式暂存装置,再将异常状态的悬吊式暂存装置加入到第一队列的队头,得到第二队列,将第二队列确定为待调整的悬吊式暂存装置队列,这样可以优先调节处于异常状态的悬吊式暂存装置。
[0100]
在一些实施例中,可以基于悬吊式暂存装置的历史工作状态,确定校核周期。可以理解的是,校核周期可以是指在两次校准之间的特定时间或条件设定。本公开实施例中的校核周期可以是一个月、三个月、半年、一年等等。在实施时,校核周期可以根据悬吊式暂存装置的历史工作状态来确定。例如,若部分悬吊式暂存装置经常出现故障,那么应该将校核周期的时间适当缩短。
[0101]
可以理解的是,在只调节一个悬吊式暂存装置的水平值的情况下,校核部件的数量可以为一个或多个。在需要调节一个待调节的悬吊式暂存装置队列的所有悬吊式暂存装置时,校核部件的数量可以为多个,本公开实施例对校核部件的数量并不限制。在校核部件的数量为多个的情况下,可以一次性测量并调节多个棚位或者多个悬吊式暂存装置的水平值,从而节省时间。
[0102]
步骤s305,对待调节的悬吊式暂存装置队列中每一悬吊式暂存装置依次执行上述循环步骤s301至步骤s303,直至调节后的悬吊式暂存装置的水平值位于预设的水平参考值的范围内。
[0103]
在一些实施例中,悬吊式暂存装置的水平调节方法还包括:步骤s306,基于待调节的悬吊式暂存装置队列确定校核路径;这里,校核路径可以是将待调节的悬吊式暂存装置的位置,按照待调节的悬吊式暂存装置队列中的顺序连起来形成的。换句话说,校核路径可以是:依次从队列的第一个待调节的悬吊式暂存装置到最后一个待调节的悬吊式暂存装置的全程路由。例如,有三个待调节的悬吊式暂存装置,装置的标识分别为1至3,在情况1:待调节的悬吊式暂存装置队列为装置1、装置2和装置3时,校核路径为依次连接装置1至3所形成的路径。在情况2:待调节的悬吊式暂存装置队列为装置3、装置2和装置1时,校核路径为依次连接装置3、2和1所形成的路径。
[0104]
步骤s307,基于校核路径,向搬运部件发送搬运指令,搬运指令用于控制搬运部件按照校核路径将校核部件搬运至悬吊式暂存装置中。
[0105]
这里,控制器可以基于校核路径向搬运部件发送搬运指令,控制搬运部件按照校核路径将校核部件搬运至悬吊式暂存装置中。
[0106]
例如,待调节的悬吊式暂存装置为3个,控制器确定的待调节的悬吊式暂存装置的队列和校核路径为情况2。在调节水平值时,首先基于校核路径,搬运部件将校核部件搬运至装置3;对装置3执行上述循环步骤s301至步骤s303,直至调节后的装置3的水平值位于预设的水平参考值的范围内;之后,搬运部件将校核部件搬运至装置2,对装置2执行上述循环步骤s301至步骤s303,直至调节后的装置2的水平值位于预设的水平参考值的范围内;最后,搬运部件将校核部件搬运至装置1,对装置1执行上述循环步骤s301至步骤s303,直至调节后的装置1的水平值位于预设的水平参考值的范围内。如此,可以按照校核路径依次调节队列中的每一个悬吊式暂存装置的水平值,从而使每一悬吊式暂存装置的水平值满足预设的水平参考值,以减少因水平值不满足预设的水平参考值而导致悬吊式暂存装置取放foup时发生报错,从而影响生产的情况。此外,由于先确定好待调节的悬吊式暂存装置队列,之后对队列中每一悬吊式暂存装置依次执行上述循环步骤s301至步骤s303,所以可以减少漏校核的情况。
[0107]
在一些实施例中,可以同时对待调节的悬吊式暂存装置队列中的待调节的悬吊式暂存装置执行上述循环步骤s301至步骤s303,直至调节后的悬吊式暂存装置的水平值位于预设的水平参考值的范围内。如此,不仅可以提高校核部件的利用率,还可以缩短调节时间,从而进一步提高作业效率。
[0108]
可以理解的是,若同时对待调节的悬吊式暂存装置执行上述循环步骤s301至步骤s303,需要在每一悬吊式暂存装置上均设有校核部件。如果有些待调整的悬吊式暂存装置没有校核部件的情况下,则可以利用搬运部件向该悬吊式暂存装置中搬运一校核部件,在这样的情况下,控制器可以根据空闲的校核部件的位置,没有校核部件的悬吊式暂存装置的位置,以及搬运部件的位置,确定每一搬运部件的搬运路径,这样,可以尽可能选择临近的搬运部件将空闲的校核部件搬运至对应的悬吊式暂存装置,不仅可以减少搬运时间,还可以减少在搬运过程中对彼此的影响,提高作业效率。
[0109]
在一些实施例中,承载部件上可以包括至少一个棚位,悬吊式暂存装置的水平调节方法还包括:对待调节的悬吊式暂存装置队列中每一悬吊式暂存装置中的每一棚位依次执行上述循环步骤s301至步骤s303,直至调节后的悬吊式暂存装置中的每一棚位的水平值位于预设的水平参考值的范围内。如此,可以减少由于校核部件的放置位置对水平值测量的影响,从而可以更加精确地调节悬吊式暂存装置的水平值。
[0110]
在一些实施例中,悬吊式暂存装置的水平调节方法还包括:步骤s308,在载荷传感单元检测到部件本体被放置在承载部件上时,将水平测量单元测量的悬吊式暂存装置的水平值存储于存储单元。
[0111]
如此,可以减少存储单元存储无用的数据,例如,在搬运过程中水平测量单元测量的水平值。
[0112]
在一些实施例中,悬吊式暂存装置的水平调节方法还包括:步骤s309,在调节后的悬吊式暂存装置的水平值位于预设的水平参考值的范围内时,控制搬运部件将校核部件搬离悬吊式暂存装置。
[0113]
在实施时,需要搬运部件按照搬运指令将校核部件搬离已经完成调节的悬吊式暂
存装置,并将校核部件搬运至下一个待调节的悬吊式暂存装置中,以完成对下一个待调节的悬吊式暂存装置的水平值的调节。
[0114]
本公开实施例还提供一种悬吊式暂存装置的水平调节方法,参考图15,包括步骤s401至步骤s408:步骤s401,基于悬吊式暂存装置的工作状态和/或校核周期,确定待调节的悬吊式暂存装置队列;步骤s402,基于待调节的悬吊式暂存装置队列确定校核路径;这里,步骤s401和步骤s402可以分别参考步骤s304和步骤s306去实施。
[0115]
步骤s403,基于校核路径,向搬运部件发送搬运指令,搬运指令用于控制搬运部件按照校核路径将校核部件搬运至悬吊式暂存装置中;这里,步骤s403可以参考步骤307去实施。
[0116]
步骤s404,在载荷传感单元检测到部件本体被放置在承载部件上时,将水平测量单元测量的悬吊式暂存装置的水平值存储于存储单元;这里,步骤s404可以参考步骤s308去实施。
[0117]
步骤s405,获取测量的悬吊式暂存装置的水平值;步骤s406,基于水平值与预设的水平参考值的关系,确定水平调节系统中每一伸缩组件的待调整的伸缩量;步骤s407,基于每一伸缩组件的待调整的伸缩量,向对应伸缩组件发送电信号,通过调节伸缩组件的长度,实现调节悬吊式暂存装置的水平值;这里,步骤s405至步骤s407可以参考步骤s301至步骤s303去实施。
[0118]
步骤s408,在调节后的悬吊式暂存装置的水平值位于预设的水平参考值的范围内时,控制搬运部件将校核部件搬离悬吊式暂存装置。
[0119]
这里,步骤s408可以参考步骤309去实施。
[0120]
在调节待调节的悬吊式暂存装置队列中的一个悬吊式暂存装置时,在执行完步骤s401至步骤s407之后,可能还需要再次甚至多次执行步骤s404和步骤s407,直至基于水平值与预设的水平参考值的关系,确定水平调节系统中每一伸缩组件的待调整的伸缩量都为零,即水平值位于预设的水平参考值范围内,再执行步骤s408。之后,可以对队列中的下一悬吊式暂存装置执行步骤s403至步骤s408,直到将队列中的每一悬吊式暂存装置的水平值都处于预设的水平参考值范围内。
[0121]
本公开实施例中的悬吊式暂存装置的水平调节方法,可以将待调节的悬吊式暂存装置队列中的每一个待调节的悬吊式暂存装置的水平值调节至预设的参考水平值范围内,无需人工一个一个登高调节,提高了作业效率;此外,由于先确定好待调节的悬吊式暂存装置队列,之后对队列中每一悬吊式暂存装置依次执行进行水平值调节,所以可以减少漏校核的情况。
[0122]
在本公开所提供的几个实施例中,应该理解到,所揭露的装置、系统和方法,可以通过非目标的方式实现。以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,如:多个单元或组件可以结合,或可以集成到另一个系统,或一些特征可以忽略,或不执行。另外,所显示或讨论的各组成部分相互之间的间接耦合、或直接耦合。
[0123]
上述作为分离部件说明的单元可以是、或也可以不是物理上分开的,作为单元显示的部件可以是、或也可以不是物理单元,即可以位于一个地方,也可以分布到多个网络单元上;可以根据实际的需要选择其中的部分或全部单元来实现本实施例方案的目的。
[0124]
本公开所提供的几个方法、装置或系统实施例中所揭露的特征,在不冲突的情况下可以任意组合,得到新的方法实施例、装置或者系统实施例。
[0125]
以上所述,仅为本公开实施例的一些实施方式,但本公开实施例的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本公开实施例揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本公开实施例的保护范围之内。因此,本公开实施例的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1