一种智能扫地机器人的充电方法与流程
1.本发明属于扫地机器人技术领域,涉及一种智能扫地机器人的充电方法。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作,一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能,一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人,扫地机器的机身为无线机器,以圆盘型为主,使用充电电池运作,操作方式以遥控器、或是机器上的操作面板。一般能设定时间预约打扫,自行充电,前方有设置感应器,可侦测障碍物,如碰到墙壁或其他障碍物,会自行转弯,并依每间不同厂商设定,而走不同的路线,有规划清扫地区。
3.随着扫地机器人发展,其在大型办公区和商业区的应用也越来越受到重视,但是由于商业区和办公区的面积较大,因此,在进行充电时,不同于家用扫地机器人,因此,需要根据其内部电量规划其充电方法,从而保证其正常使用。
技术实现要素:
4.本发明的目的在于提供一种智能扫地机器人的充电方法,以解决上述背景技术中提出的问题。
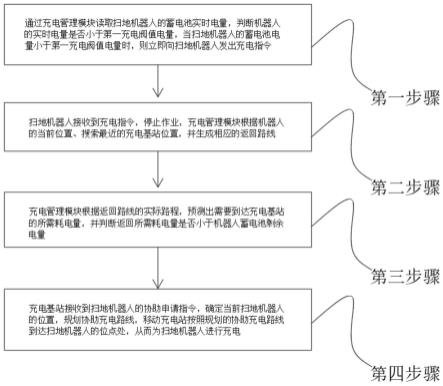
5.本发明的目的可通过下列技术方案来实现:一种智能扫地机器人的充电方法,所述机器人充电方法的具体步骤如下:第一步骤:通过充电管理模块读取扫地机器人的蓄电池实时电量,判断机器人的实时电量是否小于第一充电阀值电量,当扫地机器人的蓄电池电量小于第一充电阀值电量时,则立即向扫地机器人发出充电指令;第二步骤:扫地机器人接收到充电指令,停止作业,充电管理模块根据机器人的当前位置、搜索最近的充电基站位置,并生成相应的返回路线;第三步骤:充电管理模块根据返回路线的实际路程,预测出需要到达充电基站的所需耗电量,并判断返回所需耗电量是否小于机器人蓄电池剩余电量;当返回所需耗电量小于机器人蓄电池剩余电量时,则执行充电指令,按照返回路线返回充电基站进行充电:当返回所需耗电量大于机器人蓄电池剩余电量时,充电管理模块向充电基站报送返回失败指令,并申请派送移动充电站进行协助充电;第四步骤:充电基站接收到扫地机器人的协助申请指令,确定当前扫地机器人的位置,规划协助充电路线,移动充电站按照规划的协助充电路线到达扫地机器人的位点处,从而为扫地机器人进行充电。
6.在上述的一种智能扫地机器人的充电方法中,第一步骤中,当检测到扫地机器人的蓄电池实时电量大于第一充电阀值电量小于第二充电阀值电量时,充电管理模块根据机
器人的当前位置,搜索最近的充电基站位置,并根据充电基站位置,确定其扫地活动范围。
7.在上述的一种智能扫地机器人的充电方法中,确定扫地活动范围的具体方法如下:将搜索到的充电基站位置分别标记为充电基站a、充电基站b、充电基站c、、、、、、充电基站f,以充电基站a、充电基站b、充电基站c、、、、、、充电基站f为基点,在基点外侧以500mm为半径画圆,分别得到充电基站a、充电基站b、充电基站c、、、、、、充电基站f的充电区域,然后将充电基站a、充电基站b、充电基站c、、、、、、充电基站f的充电区域进行叠加,得到扫地机器人的扫地活动范围。
8.在上述的一种智能扫地机器人的充电方法中,第一步骤中,当检测到扫地机器人的蓄电池实时电量大于第二充电阀值电量时,则不限定其活动范围。
9.在上述的一种智能扫地机器人的充电方法中,所述第一充电阀值电量设定为3%,第二充电阀值电量设定为10%。
10.在上述的一种智能扫地机器人的充电方法中,所述扫地机器人采用无线充电方式进行充电,且所述扫地机器人的底部设置有无线充电接收端,所述充电基站的底部设置有无线充电区域,且所述无线充电区域的内部设置有无线充电发射端。
11.与现有技术相比,本发明一种智能扫地机器人的充电方法的优点为:本发明在机器人进行充电时,设定两个充电阀值,当剩余电量小于第一充电阀值时,直接进行充电,且当剩余电量过低,难以到达充电位置时,还可通过移动充电站进行协助充电,从而保证其正常充电运行,且机器人的剩余电量大于第一充电阀值电量小于第二充电阀值电量时,可根据周围充电基站的位置,划定其活动区,对其活动范围进行限定,当其电量低于第一充电阀值电量,可及时进行充电补充,避免由于其活动范围太远,造成难以到达充电基站进行充电的弊端,进一步保证机器人的正常充电使用。
附图说明
12.图1是本发明一种智能扫地机器人的充电方法的步骤示意图。
具体实施方式
13.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
14.一种智能扫地机器人的充电方法,机器人充电方法的具体步骤如下:第一步骤:通过充电管理模块读取扫地机器人的蓄电池实时电量,判断机器人的实时电量是否小于第一充电阀值电量,当扫地机器人的蓄电池电量小于第一充电阀值电量时,则立即向扫地机器人发出充电指令;第二步骤:扫地机器人接收到充电指令,停止作业,充电管理模块根据机器人的当前位置、搜索最近的充电基站位置,并生成相应的返回路线;第三步骤:充电管理模块根据返回路线的实际路程,预测出需要到达充电基站的所需耗电量,并判断返回所需耗电量是否小于机器人蓄电池剩余电量;当返回所需耗电量小于机器人蓄电池剩余电量时,则执行充电指令,按照返回路线返回充电基站进行充电:
当返回所需耗电量大于机器人蓄电池剩余电量时,充电管理模块向充电基站报送返回失败指令,并申请派送移动充电站进行协助充电;第四步骤:充电基站接收到扫地机器人的协助申请指令,确定当前扫地机器人的位置,规划协助充电路线,移动充电站按照规划的协助充电路线到达扫地机器人的位点处,从而为扫地机器人进行充电。
15.如图1所示,本发明一种智能扫地机器人的充电方法,第一步骤中,当检测到扫地机器人的蓄电池实时电量大于第一充电阀值电量小于第二充电阀值电量时,充电管理模块根据机器人的当前位置,搜索最近的充电基站位置,并根据充电基站位置,确定其扫地活动范围。
16.如图1所示,本发明一种智能扫地机器人的充电方法,确定扫地活动范围的具体方法如下:将搜索到的充电基站位置分别标记为充电基站a、充电基站b、充电基站c、、、、、、充电基站f,以充电基站a、充电基站b、充电基站c、、、、、、充电基站f为基点,在基点外侧以500mm为半径画圆,分别得到充电基站a、充电基站b、充电基站c、、、、、、充电基站f的充电区域,然后将充电基站a、充电基站b、充电基站c、、、、、、充电基站f的充电区域进行叠加,得到扫地机器人的扫地活动范围。
17.如图1所示,本发明一种智能扫地机器人的充电方法,第一步骤中,当检测到扫地机器人的蓄电池实时电量大于第二充电阀值电量时,则不限定其活动范围。
18.如图1所示,本发明一种智能扫地机器人的充电方法,所述第一充电阀值电量设定为3%,第二充电阀值电量设定为10%。
19.如图1所示,本发明一种智能扫地机器人的充电方法,所述扫地机器人采用无线充电方式进行充电,且所述扫地机器人的底部设置有无线充电接收端,所述充电基站的底部设置有无线充电区域,且所述无线充电区域的内部设置有无线充电发射端,无线充电发射端和无线充电接收端均为无线充电线圈组成。
20.本发明一种智能扫地机器人的充电方法,本发明在机器人进行充电时,设定两个充电阀值,当剩余电量小于第一充电阀值时,直接进行充电,且当剩余电量过低,难以到达充电位置时,还可通过移动充电站进行协助充电,从而保证其正常充电运行,且机器人的剩余电量大于第一充电阀值电量小于第二充电阀值电量时,可根据周围充电基站的位置,划定其活动区,对其活动范围进行限定,当其电量低于第一充电阀值电量,可及时进行充电补充,避免由于其活动范围太远,造成难以到达充电基站进行充电的弊端,进一步保证机器人的正常充电使用。
21.本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1