一种多尺寸兼容型密闭式基板盒装载口的制作方法
1.本发明涉及半导体设备技术领域,具体涉及多尺寸兼容型密闭式基板盒装载口。
背景技术:
2.随着5g通信和新能源汽车的快速发展,对高性能功率半导体器件需求日益增长。在此背景下功率半导体产线快速扩张,与此同时产线上开始制造更大尺寸的功率器件基板,以实现单个基板能够切割出更多的功率芯片。
3.当前受大尺寸半导体功率基板制造能力的限制,产线主要生产6英寸基板,但是新建的产线期望半导体制造设备能够满足今后8英寸基板生产需求。
4.传统的多尺寸基板兼容的半导体设备装载口只能装载开式基板收容器。开式基板收容器直接暴露在半导体工厂的空气中,导致基板洁净度差,产品良率低。且无法解决半导体工厂内密闭式基板盒自动化搬运过程中,因振动等原因导致的基板从基板收容器中滑出摔坏的问题。
5.使用密闭式基板盒生产、存储基板时,装载口上需要首先解锁密闭式基板盒底座和密闭式基板盒外壳。密闭式基板盒基座解锁机构按照smif (standard mechanical interface,标准机械接口)的要求设计开盒方式,6英寸和8英寸的密闭式基板解锁机构不具有兼容性。当前,在搭载了6英寸密闭式基板盒装载口的半导体设备上生产8英寸基板时,efem(equipmentfront end module,半导体设备前端模块)上除了更换相关生产的工艺参数外,还需要将装载口更换为8英寸专用的密闭式基板盒装载口。
6.在8英寸密闭式基板盒内装载6英寸基板收容器时,能实现6英寸基板保持在密闭式环境下的高洁净度,及在不更换8英寸专用的密闭式基板盒装载口的条件下,可以装载6英寸基板的需求。但是,在较大尺寸的8英寸密闭式基板盒中装较小的6寸基板收容器及基板,需要定制密闭式的密闭式基板盒外壳,导致生产成本增加。且定制化的8英寸密闭式基板盒外壳没有统一的定制标准,多工厂间协同生产变得更加困难。
7.定制化的密闭式基板盒因使用相同的密闭式基板盒底座,底部尺寸相同,在装载口上无法自动识别当前装载的基板收容器及收容器内基板的尺寸信息,以至于半导体设备无法自动获取生产不同尺寸基板所需要的差异性工艺参数。
技术实现要素:
8.为了解决或部分解决相关技术中存在的问题,本发明提供了一种多尺寸兼容型密闭式基板盒装载口,安装在efem上,通过在8英寸密闭式基板盒中放置不同基板收容器适配器,能够实现多种不同尺寸的基板自动选取预设的工艺参数进行装载。
9.本发明提供了一种多尺寸兼容型密闭式基板盒装载口,包括:
10.第一基板收容器,用于承载与其对应的多层基板;
11.第二基板收容器,用于承载与其对应的多层基板;
12.密闭式基板盒,包括密闭式基板盒底座和密闭式基板盒外壳;密闭式基板盒底座
用于承载所述第一基板收容器和第二基板收容器,密闭式基板盒外壳用于与所述密闭式基板盒底座形成容纳所述第一基板收容器和/或所述第二基板收容器的密闭式结构,该密闭式结构能够有效地控制基板在运输和生产过程中接触的水汽和颗粒污染等导致的基板加工品良率变低的问题。
13.可选地,所述第一基板收容器为6英寸基板收容器,用于承载多层6英寸基板;所述第二基板收容器为8英寸基板收容器,用于承载多层8英寸基板。
14.可选地,还包括:
15.限位挡块,设置于所述密闭式基板盒底座,用于限制所述第二基板收容器在水平方向上的移动。
16.可选地,还包括:
17.适配器,用于限制所述第一基板收容器在水平方向上的移动;
18.所述适配器的下表面的限位结构与所述密闭式基板盒底座上的限位挡块相匹配,基于所述适配器的下表面的限位结构与所述密闭式基板盒底座上的限位挡块,实现所述适配器在所述密闭式基板盒底座上的安装;
19.所述适配器和所述第一基板收容器的总高度与所述第二基板收容器的高度相同。
20.可选地,所述密闭式基板盒底座和所述密闭式基板盒外壳之间通过互锁结构锁定,二者通过互锁结构牢固地锁定,形成密闭式基板盒;所述密闭式基板盒底座和所述密闭式基板盒外壳在锁定状态下,所述第一基板收容器和/ 或所述第二基板收容器固定于所述基板盒外壳与所述密闭式基板盒底座之间,能够防止自动化装置在搬运第一基板收容器和/或第二基板收容器时,第一基板收容器和/或第二基板收容器在垂直方向振动。
21.可选地,所述密闭式基板盒外壳的前端设置有基板限位装置,所述基板限位装置用于防止基板滑出。
22.可选地,还包括:
23.升降台,用于承载所述密闭式基板盒;所述升降台通过升降台传动机构进行升降;
24.密闭式基板盒放置状态检测装置,用于检测并确定所述密闭式基板盒在所述升降台上的放置状态;所述密闭式基板盒的放置状态包括未放置密闭式基板盒、未正确放置密闭式基板盒以及正确放置密闭式基板盒。
25.可选地,若所述密闭式基板盒的放置状态为正确放置密闭式基板盒,锁紧装置将所述密闭式基板盒锁紧。
26.可选地,还包括:
27.基板突出检测装置,用于检测基板滑出的状态。
28.可选地,还包括:
29.基板映射组件,用于判断基板载台上是否发生叠片的情况。
30.本发明提供的技术方案可以包括以下有益效果:
31.本发明提供了一种多尺寸兼容型密闭式基板盒装载口,安装在半导体设备前端模块efem上。通过在8英寸密闭式基板盒中放置不同基板收容器适配器,能够实现多种不同尺寸的基板自动选取预设的工艺参数进行装载。
32.本发明使用基板收容器适配器结构设计保证多种基板收容器在水平向定位,多种尺寸基板收容器前端对齐。通过设置适配器的高度,保证多尺寸密闭式基板盒加适配器的
高度和8英寸基板收容器的高度一致,从而保证了基板收容器在密闭式基板盒内的稳定固定。上述条件是本发明的装载口实现多尺寸基板收容器兼容和自动化搬运的前提条件。
33.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
34.为了更清楚地说明本发明专利实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明专利的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
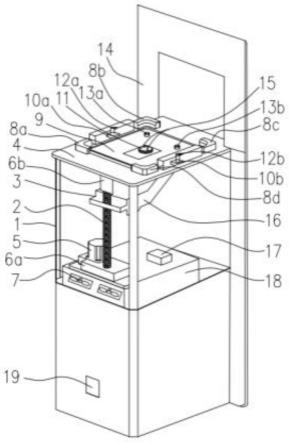
35.图1为本发明实施例中装载口的结构示意图;
36.图2为本发明实施例中一种基板收容器在密闭式基板盒中装载的结构示意图;
37.图3为本发明实施例中另一种基板收容器在密闭式基板盒中装载的结构示意图;
38.图4a为本发明实施例中装载口上部示意图;
39.图4b为本发明实施例中密闭式基板盒放置状态检测装置、密闭式基板盒解锁机构局部细节图;
40.图5为本发明实施例中装载口下降到第二高度后,基板收容器尺寸检测示意图;
41.图6为本发明实施例中识别组件和状态检测组件中传感器在透光和遮光状态下的示意图;
42.图7为本发明实施例中多种类型基板收容器识别和基板在基板收容器中状态检测组件中的多组传感器状态检测示意图;
43.图8a为本发明实施例中基板映射开始时,基板收容器中基板相对与基板状态映射传感器位置示意图
44.图8b为本发明实施例中基板映射结束时,基板收容器中基板相对与基板状态映射传感器位置示意图;
45.图8c为本发明实施例中机械手在装载口中取放基板示意图;
46.图9为本发明实施例中efem搭载装载口时气体氛围高效洁净方案示意图;
47.图10为本发明实施例中efem搭载装载口时和工厂自动化搬运装置间的搬运示意图。
具体实施方式
48.下面将参照附图更详细地描述本发明的实施方式。虽然附图中显示了本发明的实施方式,但是应该理解的是,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
49.在本发明使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本发明。在本发明和所附权利要求书中所使用的单数形式的
“”
、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
50.应当理解,尽管在本发明可能采用术语“第一”、“第二”、“第三”等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本发明范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
51.下文将结合附图对本发明实施例的技术方案进行详细描述。
52.请参阅图3,本实施例提供了一种符合smif开盒标准的密闭式基板盒,主要包括:带有人工搬运把手21和工厂自动化搬运把手20的密闭式基板盒外壳22,以及用于承载基板收容器的密闭式基板盒底座33;基板收容器包括 8英寸基板收容器32和6英寸基板收容器35。密闭式基板盒的内部在装载了 8英寸基板收容器32后,能够承载多层8英寸基板31。密闭式基板盒外壳 22的前端设有防止基板滑出的基板限位装置23。密闭式基板盒底座33和密闭式基板盒外壳22具有相互锁定的解锁销15及锁孔36,实现两者牢靠的锁定形成密闭式结构。
53.在锁定的状态下,8英寸基板收容器32的上下端被密闭式基板盒底座33 和密闭式基板盒外壳22牢牢地固定,能够防止在自动化装置进行搬运时,8 英寸基板收容器32在垂直方向上的振动造成基板的损坏。
54.符合smif开盒标准的密闭式基板盒底座33的下表面的接口能够适用 smif接口的装载口1进行开盒后装载。密闭式基板盒底座33的上表面有限定基板收容器32在水平方向移动的限位挡块34。因为密闭式基板盒55的密闭式结构,有效地控制基板在运输和生产过程中接触的水汽和颗粒污染等导致的基板加工品良率变低问题。
55.请参阅图4a,本实施例还提供了用于安装6英寸基板收容器的适配器28,适配器28下表面的限位结构能够匹配密闭式基板盒底座33上表面的限位块,且放置在密闭式基板盒内部时,其外边缘不影响密闭式基板盒的开关盒动作。适配器28的上表面具有6英寸基板收容器35的底座横梁27相匹配的限位块 29,能够水平向固定6英寸基板收容器35。6英寸基板收容器35放置上去后,在密闭式基板盒底座33上6英寸基板收容器35和8英寸基板收容器32前端开口部对齐。适配器28还能够保证6英寸基板收容器35放置上去后的高度同8英寸基板收容器32的高度相同。本实施例实现了使用密闭式基板盒外壳 22和密闭式基板盒底座33能够稳定固定6英寸基板收容器35。由于6英寸基板收容器35和8英寸基板收容器32的前端是对齐的,密闭式基板盒外壳 22上的基板限位装置能够有效地限制6英寸基板26。
56.请参阅图1,在密闭式基板盒放置在升降台9之前或未正确放置时,密闭式基板盒放置状态检测装置13上的传感器触发杆38在没有外力按压的状态下受压缩弹簧37顶起。密闭式基板盒放置状态检测装置13底部的传感器 40的传感器光轴39能够由传感器的发射端发射后到接收端接收光,传感器接收端输出on的电信号。当按压的外力大于传感器触发杆38下端顶起压缩弹簧37的压力时,触发杆38被按下,遮挡传感器发射端发出的传感器光轴 39,传感器接收端未接收到光轴并输出off的电信号。装载口控制器17的数字量输入模块采集到两个传感器光轴39都是on电信号后判定未放置密闭式基板盒。检测到传感器40任意一个输出on信号,另一个输出off信号,此时装载口控制器17判定密闭式基板盒55放置在升降台9上,但是密闭式基板盒存在放偏的情况。两个检测的传感器40都输出off电信号后,控制
器17判定密闭式基板盒放置正确。
57.密闭式基板盒55正确放置在升降台9上之前,密闭式基板盒55处于升降台9的第一高度,夹持密闭式基板盒外壳22的锁紧销12处于缩回的第一位置。密闭式基板盒限位块8作为导向和定位装置,保证密闭式基板盒在一定放置偏差范围内,能够正确地放置在装载口1上。
58.请参阅图5,密闭式基板盒正确放置后,解锁销15插入密闭式基板盒底座的锁孔36内,锁紧销15处于旋转锁紧的第一位置。在控制器17判定密闭式基板盒正确放置后,输出控制信号给旋转电磁阀10,旋转电磁阀10的连接杆带动锁紧销12旋转到第二位置,此时,密闭式基板盒外壳22被第二位置的锁紧销12限定位置。
59.请参阅图4b,密闭式基板盒解锁传动机构41由齿轮42、啮合齿轮43 和密闭式基板盒解锁销连接杆组成。解锁轴电机44带动密闭式基板盒解锁轴传动机构41转动,传动解锁销15从锁紧的第一位置旋转到解锁的第二位置,此时,密闭式基板盒外壳22和密闭式基板盒底座33处于解锁状态。
60.升降台传动机构3由伺服电机轴端传动带机构6a、联轴器6b、滚珠丝杆 2和升降台支撑机构16构成。密闭式基板盒外壳22解锁完成后,升降台伺服电机5带动升降台传送机构带动升降台9,及其上承载的密闭式基板盒底座33、基板收容器开始下降。密闭式基板盒外壳22搭在装载口上部平台4 上,且上部被锁紧销12限位。因为升降台9和装载口上部平台4分离的结构,升降台9下降时带动密闭式基板盒底座33和基板收容器一起下降,而密闭式基板盒外壳22留在装载口上部平台4上,实现了基板收容器和密闭式的密闭式基板盒外壳22的分离。
61.升降台9从第一高度下降到密闭式基板盒底座33的上表面低于装载口上部平台4的下表面,且低于基板突出检测传感器27的安装高度时开始执行基板突出检测。检测传感器47和例举传感器49的原理相同。如图6所示,例举传感器49的检测原理为传感器发射端49a发射光束49c,在没有遮挡物50 的情况下,接收端49b能正常接收光束,并输出on的电信号。光束49c在被遮挡物50遮挡的情况下,接收端49b无法接收光束,输出off的电信号。通过升降台9带动基板收容器的最高层基板开始一直检测到最底层基板结束。升降台9的有效行程大于从第一高度到最底层基板突出检测完成以后的高度差。
62.在基板滑出基板收容器一定距离后,基板开始遮挡检测传感器47的光束,检测传感器47输出off的电气信号给到控制器17的数字量输入模块,控制器17发出报警信号并停止升降台9的下降运动。以避免基板和装载口框架前端发生碰撞,或者基板滑出较大的距离导致机械手59取放基板失败。因为基板收容器相对于密闭式基板盒底座33的前端对其,因此,一个基板突出检测传感器47即可对应不同尺寸基板滑出的状态检测。
63.请参阅图5和7,升降台9下降到第二位置开始执行基板收容器的尺寸判定,因为多尺寸的基板收容器的前端对齐,根据密闭式基板盒底座33上承载的基板收容器末端长度不同,依次布局基板收容器的尺寸检测传感器45 和46。布局需要满足8英寸基板收容器32末端遮挡传感器45的光束45c和传感器46的光束46c,两个传感器输出off信号。6英寸基板收容器遮挡传感器46的光束46c,输出off信号,传感器45的光束45c未被遮挡,输出 on信号。控制器17的信号采集模块采集到基板收容器的尺寸检测传感器信号以后,根据控制器17中预先设定的基板收容器与传感器45、46信号的对应关系,从而控制器17能够判断基板收容
器的尺寸,进一步判断基板的尺寸和基板收容器52的层间距数据(不同尺寸的基板收容器的层间距需要满足 semi标准中的基板收容器52和层间距的关系)。
64.在升降板9下降到第二高度控制器17判断了基板收容器的尺寸和基板的尺寸后,升降台9继续下降到第三高度,开始进行基板状态的映射。请参阅图8,一组前后布局的基板状态映射组件48的传感器原理同上述传感器49。
65.所述基板状态映射方法,以8英寸基板31为例,首先通过基板收容器的示教流程。在基板收容器的最高和最低层基板载台30上各放置一块标准厚度的8英寸基板31。升降台自第二位置开始下降到基板收容器中最高层基板开始遮挡映射组件48的传感器的光束48c时,基板映射组件48的传感器输出 off信号。控制器17信号采集模块采集到基板映射组件48传感器的off 信号后,通过获取伺服电机5的编码器反馈的数值记录为升降台9的当前高度,并定义此高度为升降台9的第三高度。升降台9继续下降到最底层基板开始透过映射组件48的传感器的光束48c时,基板映射组件48的传感器输出on信号。控制器17将获取到的伺服电机5编码器反馈的数值记录升降台的当前高度,并定义此高度为升降台的第四高度。
66.通过预先进行基板状态映射的示教后,控制器17保存了基板映射时,升降台9的第三高度和第四高度数据。如图8a所示,升降台9下降到接近第三高度位置开始,控制器17在映射组件48的传感器的光束48c第一次被基板遮挡输出的off信号时,获取伺服电机5的编码器反馈的数值1,在升降台 9继续下降到映射组件48的传感器的光束48c第一次离开基板输出on信号时,获取伺服电机5的编码器反馈的数据2。数据2和数据1的差值即为基板厚度对应的编码器数值,再结合升降台传动机构3的传动比,计算出最高层基板载台30上的基板厚度。升降台9继续下降,开始执行下一基板载台 30上的基板状态映射。如果升降台9继续下降,开始执行下一基板载台30 上的基板状态映射。如果升降台9下降一个基板收容器的层间距后,映射组件48的传感器的光束48c未被遮挡输出off信号,控制器17判定当前的基板载台30上没有基板。如果映射出来的基板厚度为标准基板厚度的两倍,控制器17判定当前的基板载台30上面有2块基板,发生了叠片的情况。
67.升降台9一直下降到第四高度以下,基板映射组件48将完成基板收容器中所有的基板载台30上基板的状态,并记录在装载口的控制器17中。最后,如图8c所示,升降台9开始上升到机械手59的取放片高度,此高度定义为升降台9的第四高度。装载口1将当前装载的基板收容器中所有基板载台30 上面的基板状态通讯上报efem57,等待efem57调用机械手59往装载口1 中进行取放片,装载口1完成密闭式基板盒55的装载。
68.efem57在完成当前基板收容器中所有基板的传送到基板制程设备上后,开始执行装载口1卸载动作。装载口1的升降台9回到第一高度。升降台解锁机构11将反向旋转密闭式基板盒解锁销15,锁定密闭式基板盒底座 33和密闭式基板盒外壳22。密闭式基板盒锁紧销12反向旋转,解锁密闭式基板收容器55,完成装载口1的密闭式基板盒55的卸载。卸载完成后的密闭式基板盒55等待人工或者半导体工厂自动化搬运装置搬走。
69.请参阅附图9,efem57及装载口内部洁净控制的方法。efem57通过顶部洁净风机单元58抽取半导体洁净室内部的空气经过洁净风机单元58高效过滤后送入efem57内部并形成洁净气流56。通过控制efem57底部的洁净气体排出量,满足efem57的进气量略大于排气量,从而在efem57内部形成高于外部环境的微压差。因为efem57内部的微压差存在,从而在 efem57内部的洁净气流56始终能够保持装载口1的开口部61的方向流动。密闭式基板盒外
壳55在解锁后保留在装载口上部平台4上面,协助装载口1 形成除前端开口部61外的半密闭式空间。洁净风机单元58气流通过装载口 1的前端开口部61流入内部后,装载口1底部的洁净抽排装置组件7持续往装载口1的下部持续抽排,形成一定的抽排流量。同时保证装载口1内部抽排量及泄漏量低于efem57的进气量,从而保证装载口1的内部也可以形成大于外部半导体洁净间的压差。装载口1内部的气流源源不断地置换为洁净风机单元58过滤后的高洁净气体,保证了基板在生产过程中的洁净度,从而提高了基板生产的良率。
70.请参阅图10,装载口1装载在efem57前端的示意图,面向半导体工厂内的自动化搬运系统。在上述中,6英寸基板26装载在基板收容器35中通过设置合适的基板适配器,能够在密闭式基板盒55中可靠的固定,为自动化搬运提供了安全可靠的条件。8英寸基板31装载在基板收容器32中,可以直接放在密闭式基板盒55中可靠的固定。通过在装载口1前端安装地面自动化装置e84传感器19b(符合smei-e84密闭式基板盒搬运的并行io标准的传感器),可以对接agv、pgv、rgv等地面行走自动化装置66.或者将延长的e84传感器65a安装到oht64(overhead hoist transport)轨道上跟 oht64进行基于semi-e84标准的并行io通讯。自动化搬运装置64或者66 的夹爪机构通过夹持密闭式基板盒55的运载把手20,可以完成在半导体工厂和装载口1之间可靠地交接密闭式基板盒55.装载口1控制的e84传感器 19a或者65a将并行io通讯信号的状态发送到装载口控制器17中,控制器 17根据自动化搬运过程中的装载口1的状态控制整个自动化搬运的过程。同时,本发明的装载口控制器17能够接收来自基板制程设备上位机的自动-人工搬运的控制信号,满足工厂自动化和人工搬运密闭式基板盒55的快速切换。
71.本发明的多种尺寸密闭式基板盒装载口1可以直接装载密闭式基板盒55 中搭载的8英寸基板收容器32,通过预先设置合适的基板收容器适配器28,可以在密闭式基板盒55放置装置多种尺寸的基板收容器52,实现了装载口1 能够装载多尺寸基板进行半导体工艺生产。
72.以上所述,仅为本发明的实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和范围之内做出的任何修改、等同替换和改进等,均包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1