一种具有Endeffect的SCARA机器人手臂的制作方法
一种具有end effect的scara机器人手臂
技术领域
1.本发明涉及晶圆搬运技术领域,更具体地说,涉及一种具有end effect的scara机器人手臂。
背景技术:
2.伯努利原理是在流体力学的连续介质理论方程建立之前,水力学所采用的基本原理,其实质是流体的机械能守恒。即,动能+重力势能+压力势能=常数。其最为著名的推论为等高流动时,流速大,压力就小。例如,让空气从小孔迅速流出,小孔附近的压强小,小孔上方的空气压强大。
3.在对单片晶圆或其它片状材料进行位置转移时需要使用搬运机构,随着晶圆越来越薄,晶圆表面的翘曲度越来越大,从而采用常规的真空吸附方式搬运晶圆容易造成晶圆损坏。
4.前面的叙述在于提供一般的背景信息,并不一定构成现有技术。
技术实现要素:
5.本发明的目的在于提供一种具有end effect的scara机器人手臂,该机器人手臂大大降低了晶圆在搬运中薄晶圆,搬运失败损坏的概率,提高了晶圆搬运的效率。
6.本发明提供一种具有end effect的scara机器人手臂,包括scara机器人手臂、吸盘本体、吸盘座、压缩气管接头、真空气管接头;所述吸盘座一端固定连接有所述吸盘本体、所述吸盘座另一端固定连接有压缩气管接头和所述真空气管接头;所述吸盘本体的内部设有压缩流道和真空流道,所述压缩流道和所述压缩气管接头连通,所述真空流道和所述真空气管接头连通;在所述吸盘本体上设有多个和所述压缩流道连通的压缩小孔,所述压缩小孔的开口方向和所述吸盘本体所在的平面平行;在所述吸盘本体上还设有和所述真空流道连通的负压小孔,所述负压小孔的开口方向和所述压缩小孔的开口方向垂直;所述吸盘座固定于所述scara机器人手臂上,所述scara机器人手臂内部设有压缩气体气管气路,通过压缩气体气管气路和外部设备吹气装置以及负压装置连接;
7.所述吹气装置通过压缩气体气管气路和所述压缩气管接头连通,所述负压装置通过压缩气体气管气路和所述真空气管接头连通,所述真空压力传感器安装于所述负压装置和所述真空气管接头之间的管路上,用于检测真空流道内的负压。
8.进一步地,所述吸盘本体包括伯努利吸盘和吸盘盖板;所述伯努利吸盘的表面设有所述压缩流道、所述真空流道、所述压缩小孔和所述负压小孔,所述吸盘盖板和所述伯努利吸盘形状相吻合,所述吸盘盖板覆盖于所述压缩流道和所述真空流道上使其形成密闭通道。
9.进一步地,所述伯努利吸盘包括吸盘和手柄,所述吸盘和所述手柄一体成型连接,所述手柄另一端和所述吸盘座固定连接;所述压缩流道包括弧形压缩流道和直线压缩流道,所述弧形压缩流道和所述直线压缩流道连通;所述吸盘呈c形,所述c形吸盘上设有两条
关于所述c形吸盘开口对称的所述弧形压缩流道,所述手柄上设有两条分别和所述弧形压缩流道连通的所述直线压缩流道,所述直线压缩流道另一端和所述压缩气管接头连通;所述压缩小孔和所述负压小孔均设置在所述c形吸盘上,所述c形吸盘上开口两侧的所述压缩小孔对称设置。
10.进一步地,所述负压小孔位于所述c形吸盘上两侧压缩小孔的对称线上。
11.进一步地,所述吸盘座上设有两个压缩气道和一个真空气道,所述吸盘盖板上设有两个压缩孔和一个真空孔,所述吸盘盖板一端固定于所述吸盘座上,两个所述压缩孔分别和所述压缩气道的一端连通,所述压缩气道的另一端和所述压缩气管接头连通;所述真空孔和所述真空气道的一端连通,所述真空气道的另一端和所述真空气管接头连通;所述吸盘盖板上的压缩孔和真空孔分别和所述伯努利吸盘上的压缩流道和真空流道连通。
12.进一步地,在所述真空孔和所述真空气道以及所述压缩孔和所述压缩气道的连接处均设有密封圈。
13.进一步地,在所述吸盘本体表面设有真空吸盘,所述真空吸盘呈θ形,所述负压小孔设置于所述真空吸盘的底部。
14.进一步地,在所述吸盘本体的边缘处设有多个出风缺口,所述出风缺口和所述压缩小孔连通;在所述吸盘本体表面还设有多个负压吸盘,所述负压吸盘呈圆环形,所述负压吸盘和所述出风缺口连通,所述压缩小孔位于所述负压吸盘下方。
15.进一步地,所述压缩流道的中部环绕有环形块,所述环形块上设有多个风孔,所述风孔上设有两个呈中心对称的所述压缩小孔;在所述压缩小孔上方覆盖有旋风吸盘,所述旋风吸盘上设有和所述压缩小孔对应的旋风吸盘排气槽。
16.进一步地,所述旋风吸盘有六个,六个所述旋风吸盘分为左侧3个所述旋风吸盘与右侧3个所述旋风吸盘,左侧3个所述旋风吸盘与右侧3个所述旋风吸盘的排气方向相反。
17.本发明提供的具有end effect的scara机器人手臂,通过scara机器人手臂打开吹气装置和负压装置;吹气装置形成的气流会由压缩气管接头进入压缩流道,然后从开口方向和吸盘本体所在的平面平行的压缩小孔高速流出,从而在压缩小孔处产生垂直向吸盘本体表面的负压;此时,吸盘本体随scara机器人手臂运动到晶圆下方,会将晶圆吸附到吸盘本体表面,当晶圆吸附到吸盘本体表面后会对吸盘本体表面的负压小孔进行封堵,此时当负压装置继续进行负压吸引时,气流无法从真空流道吸出,从而形成真空状态,此时安装于负压装置和真空气管接头之间管路上的真空压力传感器会监测到其管内压强变化,进而将信号传输给scara机器人手臂,scara机器人手臂会识别取晶圆成功;吸盘本体吸附着晶圆随着scara机器人手臂的运动,将晶圆从一个位置移动到另外一个位置,通过电磁阀控制吹气装置和负压装置的通断,当压缩小孔处的负压消失,晶圆与吸盘本体表面吸附力消失,吸盘本体随着scara机器人手臂的运动与晶圆脱离,放片成功;大大降低了晶圆在搬运中损坏的概率,提高了晶圆搬运的效率。
附图说明
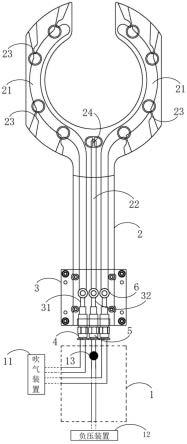
18.图1为本发明实施例1提供的具有end effect的scara机器人手臂的平面示意图。
19.图2为图1中具有end effect的scara机器人手臂的结构示意图。
20.图3为图2中的a部放大图。
21.图4为图1中具有end effect的scara机器人手臂的伯努利吸盘的结构示意图。
22.图5为图1中具有end effect的scara机器人手臂的伯努利吸盘的另一视角的结构示意图。
23.图6为图1中具有end effect的scara机器人手臂的吸盘座的结构示意图。
24.图7为图1中具有end effect的scara机器人手臂的爆炸图。
25.图8为图1中具有end effect的scara机器人手臂的另一视角的结构示意图。
26.图9为图1中具有end effect的scara机器人手臂的使用示意图。
27.图10为本发明实施例2提供的具有end effect的scara机器人手臂的平面示意图。
28.图11为图10中的a部放大图。
29.图12为图10中具有end effect的scara机器人手臂的局部示意图。
30.附图中涉及的附图标记和组成部分如下所示:
31.1、scara机器人手臂
ꢀꢀꢀꢀ
11、吹气装置
ꢀꢀꢀꢀꢀꢀꢀꢀ
12、负压装置
32.13、真空压力传感器
ꢀꢀꢀꢀ
2、吸盘本体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21、压缩流道
33.211、弧形压缩流道
ꢀꢀꢀꢀꢀ
212、直线压缩流道
ꢀꢀꢀ
22、真空流道
34.23、压缩小孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24、负压小孔
ꢀꢀꢀꢀꢀꢀꢀꢀ
25、伯努利吸盘
35.251、吸盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
252、手柄
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
253、开口
36.26、吸盘盖板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
261、压缩孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
262、真空孔
37.27、真空吸盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
28、出风缺口
ꢀꢀꢀꢀꢀꢀꢀꢀ
29、负压吸盘
38.3、吸盘座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31、压缩气道
ꢀꢀꢀꢀꢀꢀꢀꢀ
32、真空气道
39.4、压缩气管接头
ꢀꢀꢀꢀꢀꢀꢀ
5、真空气管接头
ꢀꢀꢀꢀꢀ
6、密封圈
40.7、晶圆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8、环形块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
81、风孔
41.9、旋风吸盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
91、旋风吸盘排气槽
具体实施方式
42.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
43.本发明的说明书和权利要求书中的术语“第一”、“第二”、“第三”、“第四”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
44.实施例1
45.图1为本发明实施例1提供的具有end effect的scara机器人手臂的平面示意图,图2为图1中具有end effect的scara机器人手臂的结构示意图,图3为图2中的a部放大图。请参照图1、图2、图3,本发明实施例提供的具有end effect(末端执行器)的scara机器人手臂,包括scara机器人手臂1、吸盘本体2、吸盘座3、压缩气管接头4、真空气管接头5;吸盘座3一端固定连接有吸盘本体2、吸盘座3另一端固定连接有压缩气管接头4和真空气管接头5;吸盘本体2的内部设有压缩流道21和真空流道22,压缩流道21和压缩气管接头4连通,真空流道22和真空气管接头5连通;在吸盘本体2上设有多个和压缩流道21连通的压缩小孔23(压缩小孔23的口径远小于压缩流道21的内径),压缩小孔23的开口方向和吸盘本体2所在的平面平行;在吸盘本体2上还设有和真空流道22连通的负压小孔24,负压小孔24的开口方向和压缩小孔23的开口方向垂直;吸盘座3固定于scara机器人手臂1上,scara机器人手臂1
内部设有压缩气体气管气路,通过压缩气体气管气路和外部设备吹气装置11(例如可以为风机、气泵等)以及负压装置12(例如可以为真空泵)连接;
46.吹气装置11通过压缩气体气管气路和压缩气管接头4连通,负压装置12通过压缩气体气管气路和真空气管接头5连通,真空压力传感器13安装于负压装置12和真空气管接头5之间的管路上,用于检测真空流道22内的负压。
47.图9为图1中具有end effect的scara机器人手臂的使用示意图。进一步参照图1、图9,需要说明的是,scara机器人手臂1在原理上和现有技术的scara(一种应用于平面搬运作业的机器人手臂)相同;当需要通过本发明的机器人手臂对晶圆7进行搬运时,首先通过scara机器人手臂1打开吹气装置11和负压装置12;吹气装置11形成的气流会由压缩气管接头4进入压缩流道21,然后从开口方向和吸盘本体2所在的平面平行的压缩小孔23高速流出,从而在压缩小孔23处产生垂直向吸盘本体2表面的负压(伯努利原理);
48.此时,吸盘本体2随scara机器人手臂1运动到晶圆7下方,会将晶圆7吸附到吸盘本体2表面,当晶圆7吸附到吸盘本体2表面后会对吸盘本体2表面的负压小孔24进行封堵,此时当负压装置12继续进行负压吸引时,气流无法从真空流道22吸出,从而形成真空状态,此时安装于负压装置12和真空气管接头5之间管路上的真空压力传感器13会监测到其管内压强变化,进而将信号传输给scara机器人手臂1,scara机器人手臂1会识别取晶圆7成功;吸盘本体2吸附着晶圆7随着scara机器人手臂1的运动,将晶圆7从一个位置移动到另外一个位置,通过电磁阀通断来控制吹气装置11和负压装置12,当压缩小孔23处的负压消失,晶圆7与吸盘本体2表面吸附力消失,吸盘本体2随着scara机器人手臂1的运动与晶圆7脱离,放片成功;
49.需要说明的是,本发明的具有end effect的scara机器人手臂,吸盘本体2有不同规格的尺寸,从而不限于处理8寸晶圆尺寸,经过尺寸缩放也可以实现6,12寸类的晶圆的处理;同时,特别适用于处理但不限于薄片,taiko片,厚片也能处理;该机器人手臂大大降低了晶圆在搬运中搬运失败损坏的概率,提高了晶圆搬运的效率。
50.图4为图1中具有end effect的scara机器人手臂的伯努利吸盘的结构示意图,图5为图1中具有end effect的scara机器人手臂的伯努利吸盘的另一视角的结构示意图。请参照图4、图5,本发明的吸盘本体2包括伯努利吸盘25和吸盘盖板26;伯努利吸盘25的表面设有压缩流道21、真空流道22、压缩小孔23和负压小孔24,吸盘盖板26和伯努利吸盘25形状相吻合,吸盘盖板26覆盖于压缩流道21和真空流道22上使其形成密闭通道。
51.进一步参照图4、图5,伯努利吸盘25包括吸盘251和手柄252,吸盘251和手柄252一体成型连接,手柄252另一端和吸盘座3固定连接;压缩流道21包括弧形压缩流道211和直线压缩流道212,弧形压缩流道211和直线压缩流道212连通;吸盘251呈c形,c形吸盘251上设有两条关于c形吸盘251的开口253对称的弧形压缩流道211,手柄252上设有两条分别和弧形压缩流道211连通的直线压缩流道212,直线压缩流道212另一端和压缩气管接头4连通;压缩小孔23和负压小孔24均设置在c形吸盘251上,c形吸盘251上的开口253两侧的压缩小孔23对称设置。
52.需要说明的是,吸盘251呈c形的设计更加贴合抓取晶圆,此外,c形吸盘251上的两条关于c形吸盘251的开口253对称的弧形压缩流道211,以及c形吸盘251上的开口253两侧的压缩小孔23对称设置;使得吸盘本体2在抓取晶圆时,吸力左右平衡,提高了晶圆抓取的
稳定性。
53.进一步地,负压小孔24位于c形吸盘251上两侧压缩小孔23的对称线上。从而使得负压小孔24吸附晶圆时,不会使得吸附在吸盘本体2上的晶圆受力发生偏移,进一步提高了晶圆抓取的稳定性。
54.图6为图1中具有end effect的scara机器人手臂的吸盘座的结构示意图,图7为图1中具有end effect的scara机器人手臂的爆炸图,图8为图1中具有end effect的scara机器人手臂的另一视角的结构示意图。请参照图6、图7,图8,本发明的吸盘座3上设有两个压缩气道31和一个真空气道32,吸盘盖板26上设有两个压缩孔261和一个真空孔262,吸盘盖板26一端固定于吸盘座3上,两个压缩孔261分别和压缩气道31的一端连通,压缩气道31的另一端和压缩气管接头4连通;真空孔262和真空气道32的一端连通,真空气道32的另一端和真空气管接头5连通;吸盘盖板26上的压缩孔261和真空孔262分别和伯努利吸盘25上的压缩流道21和真空流道22连通。在真空孔262和真空气道32以及压缩孔261和压缩气道31的连接处均设有密封圈6,进一步提高了连接处的密闭性。
55.进一步参照图3,在吸盘本体2表面设有真空吸盘27,真空吸盘27呈θ形,负压小孔24设置于真空吸盘27的底部。需要说明的是,真空吸盘27的设计,使得负压小孔24不会直接接触晶圆,通过真空吸盘27使得晶圆上负压吸引的面积增加,进一步减小负压小孔24对晶圆吸附时造成的损伤。
56.进一步参照图3,在吸盘本体2的边缘处设有多个出风缺口28,出风缺口28和压缩小孔23连通;在吸盘本体2表面还设有多个负压吸盘29,负压吸盘29呈圆环形,负压吸盘29和出风缺口28连通,压缩小孔23位于负压吸盘29下方。需要说明的是,当吹气装置11打开时,负压吸盘29和出风缺口28会形成一定的气体对流,压缩空气快速排除,槽内气压降低,进行晶圆吸附。
57.实施例2
58.本实施例提供的具有end effect的scara机器人手臂和实施例1提供的具有end effect的scara机器人手臂基本相同,不同之处在于旋风吸盘(9)。
59.图10为本发明实施例2提供的具有end effect的scara机器人手臂的平面示意图,图11为图10中的a部放大图,图12为图10中具有end effect的scara机器人手臂的局部示意图。请参照图10-图12,本实施例提供的压缩流道21的中部环绕有环形块8,环形块8上设有多个风孔81,风孔81上设有两个呈中心对称的压缩小孔23;在压缩小孔23上方覆盖有旋风吸盘9,旋风吸盘9上设有和压缩小孔23对应的旋风吸盘排气槽91。
60.进一步地,旋风吸盘9有六个,六个旋风吸盘9分为左侧3个旋风吸盘9与右侧3个旋风吸盘9,左侧3个旋风吸盘9与右侧3个旋风吸盘9的排气方向相反。
61.需要说明的是,当吸盘本体2准备取片时,打开吹气装置11和负压装置12;每个旋风吸盘9在吸盘内环有两个方向相反的排气口,气体从两个排气口高速排出,形成类似旋风状气流排出方向,旋风吸盘9中心形成负压区,吸附晶元;当吸盘本体2位于晶元上方一定距离进行晶元吸附时,夹爪左侧3个旋风吸盘与右侧3个旋风吸盘排气方向相反,防止吸盘本体2吸取晶元过程中晶元位置因气流排出方向造成偏移;晶元吸附成功后,晶元背面与旋风吸盘9上的台阶接触,气流从旋风吸盘排气槽91排出,保持旋风吸盘(9)中心的负压稳定;此外,当负压装置12继续进行负压吸引时,气流无法从真空流道22吸出,从而形成真空状态,
此时安装于负压装置12和真空气管接头5之间管路上的真空压力传感器13会监测到其管内压强变化,进而将信号传输给scara机器人手臂1,scara机器人手臂1会识别取晶元成功;吸盘本体2吸附着晶元随着scara机器人手臂1的运动,将晶元从一个位置移动到另外一个位置;关闭吹气装置11和负压装置12,压缩小孔23处的负压消失,晶元与吸盘本体2表面吸附力消失,吸盘本体2随着scara机器人手臂1的运动与晶元脱离,放片成功。
62.进一步地,本发明的具有end effect的scara机器人手臂,吸盘本体2有不同规格的尺寸,从而不限于处理8寸晶圆尺寸,经过尺寸缩放也可以实现6,12寸类的晶圆的处理;同时,特别适用于处理但不限于薄片,taiko片,厚片也能处理;该机器人手臂大大降低了晶圆在搬运中损坏的概率,提高了晶圆搬运的效率。
63.基于上文的描述可知,本发明优点在于:
64.1、本发明提供的具有end effect的scara机器人手臂,通过scara机器人手臂1打开吹气装置11和负压装置12;吹气装置11形成的气流会由压缩气管接头4进入压缩流道21,然后从开口方向和吸盘本体2所在的平面平行的压缩小孔23高速流出,从而在压缩小孔23处产生垂直向吸盘本体2表面的负压;此时,吸盘本体2随scara机器人手臂1运动到晶圆7下方,会将晶圆7吸附到吸盘本体2表面,当晶圆7吸附到吸盘本体2表面后会对吸盘本体2表面的负压小孔24进行封堵,此时当负压装置12继续进行负压吸引时,气流无法从真空流道22吸出,从而形成真空状态,此时安装于负压装置12和真空气管接头5之间管路上的真空压力传感器13会监测到其管内压强变化,进而将信号传输给scara机器人手臂1,scara机器人手臂1会识别取晶圆7成功;吸盘本体2吸附着晶圆7随着scara机器人手臂1的运动,将晶圆7从一个位置移动到另外一个位置,关闭吹气装置11和负压装置12,压缩小孔23处的负压消失,晶圆7与吸盘本体2表面吸附力消失,吸盘本体2随着scara机器人手臂1的运动与晶圆7脱离,放片成功;大大降低了晶圆7在搬运中损坏的概率,提高了晶圆7搬运的效率。
65.2、本发明提供的具有end effect的scara机器人手臂,适用与薄晶圆的抓取;大大提高抓片的成功率
66.3、本发明提供的具有end effect的scara机器人手臂,尺寸改变可适用与6、8、12英寸晶圆等。
67.4、本发明提供的具有end effect的scara机器人手臂,可在距离晶圆一定距离的上方进行晶圆取片,防止下压晶圆取片造成晶圆损坏。
68.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1