导电纤维及其制备方法和应用
1.本技术涉及摩擦纳米发电技术领域,具体而言,涉及一种导电纤维及其制备方法和应用。
背景技术:
2.摩擦纳米发电机(teng)作为一种能量产生单元,在其内部的电路中,由于摩擦起电效应,两个摩擦电极性不同的摩擦材料薄层之间会发生电荷转移而使得二者之间形成一个电势差;在外部电路中,电子在电势差的驱动下在两个分别粘贴在摩擦电材料层背面的电极之间或者电极与地之间流动,从而来平衡这个电势差。摩擦纳米发电机的动力源可以是已被人们认识的风力、水力、海浪等大能源,也可以是人的行走、身体的晃动、手的触摸、下落的雨滴等从没被人们注意过的环境随机能源,还可以是车轮的转动、机器的轰鸣等。
3.摩擦纳米发电机技术可以为纺织品提供电源和传感响应,而纺织品通过智能织物teng的构建为teng提供了可穿戴、舒适和多样化的载体。智能织物teng最重要的两个部分是柔性电极和摩擦材料,然而,在可穿戴智能织物teng的应用中存在以下问题:
4.首先,柔性电极不易与摩擦材料组合;其次,目前智能织物teng通常是将导电填充填料嵌入柔性可拉伸弹性基体中制备导电纤维,将导电纤维用于编织智能织物teng。但传统的导电纤维制备方法中,采用柔性电极和摩擦材料制备导电纤维工艺复杂,集成度低,进而导致智能织物teng无法批量生产。
5.因此,如何实现智能织物teng的批量生产是智能织物teng应用的难点。
技术实现要素:
6.为了解决上述问题,本技术的第一目的在于提供一种导电纤维的制备方法,导电纤维包括弹性壳体以及包覆于弹性壳体中的柔性电极,制备方法包括以下步骤:采用具有流动性的包覆材料包覆柔性电极;及固化包覆在柔性电极上的包覆材料以形成弹性壳体,从而解决柔性电极不易与摩擦材料组合的问题,简化导电纤维的制备工艺,实现智能织物teng的批量生产。
7.在其中一种实施例中,包覆材料的粘度。
8.在其中一种实施例中,包覆材料为液态硅橡胶;
9.在其中一种实施例中,弹性壳体选自树脂、塑料和橡胶中的至少一种。
10.在其中一种实施例中,柔性电极为导电液体或导电胶体;
11.在其中一种实施例中,柔性电极为液态金属。
12.在其中一种实施例中,固化的时间60s~120s。
13.在其中一种实施例中,固化的温度为100℃~300℃。
14.在其中一种实施例中,采用具有流动性的包覆材料包覆柔性电极的步骤包括:
15.分别控制柔性电极和包覆材料的流动速率,将柔性电极注入流动的包覆材料形成的空腔,以使包覆材料包覆柔性电极。
16.在其中一种实施例中,分别控制柔性电极和包覆材料的流动速率具体包括:
17.采用同心轴针管分别控制柔性电极和包覆材料的流动速率,以使得单位时间内柔性电极的注入体积不超过单位时间内流动的包覆材料形成的空腔体积。
18.在其中一种实施例中,同心轴针管包括用于容纳柔性电极的第一流道、用于容纳包覆材料的第二流道以及与所述第一流道和所述第二流道连通的出料口,所述固化包覆在柔性电极上的包覆材料的步骤在所述包覆材料和柔性电极流出所述出料口后进行。
19.本技术的第二目的在于提供一种制备方法制备的导电纤维。
20.本技术的第三目的在于提供一种含有上述导电纤维的摩擦纳米发电织物。
21.本技术的第四目的在于提供一种可穿戴电子设备,包括上述摩擦纳米发电织物。
22.本技术的创造性地利用流动的包覆材料包覆柔性电极,进一步通过快速固化包覆材料,原位集成包覆材料和柔性电极,获得了具有导电性、柔性可拉伸性、可编织性的导电纤维,实现了包含两种材料的原位集成和导电纤维的自动化批量生产,简化了导电纤维的制备工艺,降低了导电纤维的生产成本,提高了导电纤维的生产效率。
附图说明
23.为了更清楚地说明本技术具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
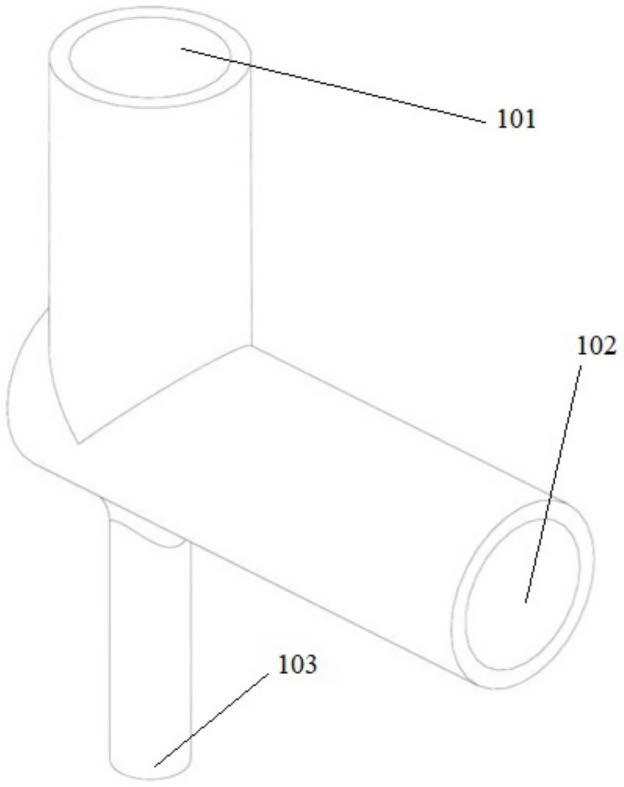
24.图1为本技术一实施例中使用的同心轴针管的外部结构示意图;
25.图2为图1所示的同心轴针管的剖面图;
26.图3为图1所示的同心轴针管的出料口的局部放大图;
27.图4为本技术一实施例的导电纤维的结构示意图;
28.图5为本技术一实施例的环状摩擦纳米发电织物的结构示意图;
29.图6为本技术一实施例的平面摩擦纳米发电织物的结构示意图;
30.图7为本技术的实施例1制备导电纤维的工艺流程示意图;
31.图8为本技术的实施例1中手指部位的可穿戴传感器及其在不同手指运动状态下产生的电信号;
32.图9为本技术的实施例1中手腕部位的可穿戴传感器及其在不同手腕运动状态下产生的电信号;
33.图10为本技术的实施例1中手臂部位的可穿戴传感器及其在不同手臂运动状态下产生的电信号;
34.图11为本技术的实施例1中足底部位的可穿戴传感器及其在不同足部运动状态下产生的电信号。
具体实施方式
35.现将详细地提供本技术实施方式的参考,其一个或多个实例描述于下文。提供每一实例作为解释而非限制本技术。实际上,对本领域技术人员而言,显而易见的是,可以对本技术进行多种修改和变化而不背离本技术的范围或精神。例如,作为一个实施方式的部
分而说明或描述的特征可以用于另一实施方式中,来产生更进一步的实施方式。
36.因此,旨在本技术覆盖落入所附权利要求的范围及其等同范围中的此类修改和变化。本技术的其它对象、特征和方面公开于以下详细描述中或从中是显而易见的。本领域普通技术人员应理解本讨论仅是示例性实施方式的描述,而非意在限制本技术更广阔的方面。
37.如上文,目前智能织物tengs通常是将导电填充填料嵌入柔性可拉伸弹性基体中,用于编织智能织物teng。常见的导电填充材料有金属丝、导电纳米填料,如碳纳米管、金纳米片和银纳米线等,以及导电水凝胶和导电液体,如离子水凝胶、有机凝胶、盐水溶液和液态合金等。
38.在目前导电填充材料中,金属丝是不可拉伸的,这导致在实际使用中弹性基体出现裂纹问题。对于导电纳米填料来说,由于其制备工艺要求严格,纳米填料需要精确控制和分散,导电纤维制备工艺很难实现批量生产。离子水凝胶、有机凝胶和盐溶液的电导率低于液态合金电极,削弱了智能织物tengs的输出性能。
39.近年来,有研究将液态合金泵送或将液态合金注入中空纤维中制备柔性高导电纤维,用于编织智能织物teng,具体的制备工艺包括:分别制造柔性电极(或直接购买)和可拉伸弹性中空纤维(或直接购买),然后通过真空抽吸、注射挤压、直接插入或包装的方式得到导电纤维。
40.上述导电纤维制备方法中不同的组件是分开制造的,工艺复杂,集成度低,不适配传统纺织工艺,导致无法批量生产智能织物tengs。
41.为了至少部分解决上述技术问题的至少一个,本技术的第一方面提供了一种导电纤维的制备方法,导电纤维包括弹性壳体以及包覆于弹性壳体中的柔性电极,弹性壳体具有拉伸、弯折等机械变形后回复原始形态的特点,导电纤维的制备方法包括以下步骤:
42.采用具有流动性的包覆材料包覆柔性电极;及
43.固化包覆在柔性电极上的包覆材料以形成弹性壳体。
44.具体地,具有流动性的包覆材料可以是常温状态下具有流动性且能够包覆柔性电极的材料,进而通过热固化的方式实现包覆材料的固化;或者具有流动性的包覆材料可以是加热软化而具有流动性且能够包覆柔性电极的材料,进而通过冷却固化的方式实现包覆材料的固化。
45.需要说明的是,teng最主要的两个部分为摩擦带电的摩擦材料和用于电极的导电材料,而出于可穿戴织物teng对柔性的需求,多种柔性导电材料被开发为可穿戴织物teng的柔性电极,以用于和摩擦材料组合应用于可穿戴织物teng领域。然而,目前可穿戴织物teng的制备工艺还无法实现批量生产合大规模工业制造,如何通过材料的选择和工艺的配合是实现可穿戴织物teng的批量生产的技术难点。
46.本技术创造性地选择具有流动性的包覆材料和具有流动性的柔性导电材料,在原料流动过程中实现包覆材料和柔性电极的原位集成,进一步通过快速固化包覆材料完成导电纤维的制备,实现了导电纤维的批量生产,简化了导电纤维的制备工艺,降低了导电纤维的生产成本。
47.可以理解的是,传统方法采用的分离式制备工艺生产导电纤维,需要多步工艺配合才可以将导电纤维装配到纺织设备,如导电复合纤维的制备、到导电复合纤维的收集、到
导线复合纤维装配到纺织机等问题。本技术创造性的选择具有流动性的包覆材料,通过本技术的制备工艺将包覆材料与柔性导电材料进行原位集成后固化包覆材料实现摩擦纳米发电电机包含的两种材料的复合,解决了摩擦材料与柔性电极不易组合的问题,并且本技术的制备工艺能够兼容纺织工艺,可将制得的导电纤维直接连接至纺织机,无需多步工艺将导电复合纤维转移至纺织机,从而也解决了由摩擦材料和柔性电极组合的导电纤维因制备工艺复杂,不能和传统纺织技术配合,导致可穿戴织物teng无法批量生产的问题。
48.一些实施方案中,为了保证柔性电极和包覆材料的原位集成,采用具有流动性的包覆材料包覆柔性电极具体包括:
49.分别控制包覆材料和柔性电极的流动速率,将柔性电极注入流动的包覆材料形成的空腔,以使流动的包覆材料包覆柔性电极。
50.一些具体实施方案中,为了将流动的柔性电极注入流动的包覆材料形成的空腔,实现柔性电极和包覆材料两种材料的集成,可以采用同心轴针管同时注射挤出两种材料,并在针管出口处对两种材料进行集成。
51.因此,将柔性电极注入流动的包覆材料形成的空腔具体包括:
52.采用同心轴针管将柔性电极注入流动的包覆材料形成的空腔,注入过程中分别控制柔性电极和包覆材料的流动速率,以使得单位时间内柔性电极的注入体积不超过单位时间内流动的包覆材料形成的空腔体积。
53.一些具体实施方案中,同心轴针管的结构如图1所示,同心轴针管包括至少两个进料口和与两个出料口同时连通的至少一个出料口103,两个进料口分别为柔性电极进料口101以及包覆材料进料口102,图1所示的同心轴针管的剖面图如图2所示,同心轴针管具有两个不同流道,分别为容纳柔性电极的第一流道201和容纳包覆材料的第二流道202,如图1所示的同心轴针管的出料口103的局部放大图如图3所示,出料口103同时和第一流道201和第二流道202相连通。
54.进一步,将流动的柔性电极注入流动的包覆材料形成的空腔时,控制柔性电极和包覆材料的流动速率,使得单位时间内柔性电极的注入体积不超过单位时间内流动的包覆材料形成的空腔体积,以避免流速过快的柔性电极在与对包覆材料集成时导致包覆材料形成的空腔形貌不规则,甚至出现柔性电极冲破包覆材料导致制备工艺无法进行。
55.为了兼顾包覆材料在导电纤维制备过程中需要具备的流动性,以及包覆流动的柔性电极需要具备的黏性,本技术使用的包覆材料在常温下的粘度为100pa
·
s~180pa
·
s,以在与柔性电极集成时为流动的柔性电极提供足够的支撑强度,在两种材料集成过程中为流动的柔性电极提供充足的包覆力,并保持自身完整的形态,形成规则的空腔容纳流动的柔性电极。
56.可以理解的是,同心轴针管包括用于容纳包覆材料的第一流道、用于容纳柔性电极的第二流道以及与所述第一流道和所述第二流道连通的出料口,为了避免包覆材料固化堵塞出料口,固化包覆在柔性电极上的包覆材料的步骤在所述包覆材料和柔性电极流出所述出料口后进行。
57.进一步,在固化包覆材料过程中,根据固化时机的不同,固化包覆有柔性电极的包覆材料以得到导电纤维具体包括:
58.原位固化包覆有柔性电极的包覆材料,收集固化产物得到导电纤维;其中,原位固
化是指在流动的包覆材料对柔性电极进行包覆时,原位对包覆材料进行固化,从而实现对包覆材料和柔性电极的原位集成,并在固化包覆材料后收集固化产物,收集的固化产物即为导电纤维;
59.或者,螺旋收集包覆有柔性电极的包覆材料,待收集结束后固化收集的包覆材料以得到导电纤维;其中,收集包覆有柔性电极的包覆材料是指将流动的柔性电极包覆于包覆材料内部后,对包覆了柔性电极的包覆材料进行螺旋收集,收集结束后进行固化包覆材料即完成导电纤维的制备。
60.相应的,为了实现包覆材料和柔性电极的原位集成,本技术的制备方法还要求包覆材料在流动时的固化速度远远小于与柔性电极接触集成后的固化速度,并且包覆材料在未固化时能够为柔性电极提供足够的支撑强度。进一步,为了实现包覆材料和柔性电极的原位集成的持续进行,包覆材料固化的时间60s~120s,进一步固化时间为60s~90s,更进一步固化时间为70s~80s。
61.一些实施方案中,固化为热固化,热固化的温度为100℃~300℃,进一步为100℃~200℃,更进一步为100℃~120℃。一些具体实施方案中,通过红外灯照射进行热固化,为了达到上述固化温度,可以使用2000w的红外灯对包覆材料进行热固化处理。
62.另一些实施方案中,也可以采用冷却固化的方式对具有流动性的包覆材料进行固化,通过原位集成的方式实现对柔性电极的包覆,从而制备复合的导电纤维。
63.一些实施方案中,本技术的包覆材料固化后形成弹性壳体选自树脂、塑料和橡胶中的至少一种。一些具体实施方案中,包覆材料可以为液态硅橡胶。液态硅橡胶是相对混炼型半固态硅橡胶和常见单组分室温硫化硅胶而言的一类有机硅胶,又称双组分加成性硅橡胶,具有流动性好,硫化快,可以浇注成型也可以注射成型。可以理解的是,为了兼顾本技术的制备方法对包覆材料的流动性要求和包覆性的要求,本技术使用液态硅橡胶的粘度为100pa
·
s~180pa s,进一步可以为110pa
·
s~170pa s,更进一步可以为120pa
·
s~160pa s,更进一步可以为130pa
·
s~150pa s,具体地可以为140pa s;此外,为了实现摩擦材料和柔性电极的原位集成,本技术的制备方法还要求液态硅橡胶在流动时的固化速度远远小于两种材料接触集成后的固化速度。
64.本技术利用液态硅橡胶在常温下的流动性以及加热条件下快速固化的特点,采用液态硅橡胶和柔性电极进行组合,实现了通过液态硅橡胶及其包覆的柔性电极的原位集成制备导电纤维,简化了导电纤维的制备工艺,降低了导电纤维的制备成本,提高了导电纤维的生产效率。采用液态橡胶制备导电纤维时,液态橡胶固化的时间为60s~120s,进一步固化时间为60s~90s,更进一步固化时间为70s~80s;固化方式为热固化,热固化的温度为100℃~300℃,进一步为100℃~200℃,更进一步为100℃~120℃。
65.需要说明的是,液相硅橡胶一般用于医疗器械产品或者电子产品的防水密封胶等场景,因此,本技术还提供了一种液态硅橡胶在制备导电纤维的新用途,用于制备导电纤维的弹性壳体,作为摩擦材料实现摩擦纳米发电机的自供能。
66.一些具体实施方案中,本技术使用的柔性电极为导电液体或导电胶体。具体的,导电液体是指具有导电能力的液体,例如盐水溶液和液态金属等,导电胶体是指具有导电能力的凝胶,包括离子水凝胶、有机凝胶等,能够进行溶胶和凝胶的转化,在溶胶状态下可与具有流动性的包覆材料进行原位集成。
9200-40-a/b(a:b=1:1),液态硅橡胶粘度为140pa
·
s(25℃下),控制注射器a挤出液态金属,速率为0.02ml/min,同时控制注射器b挤出液态硅橡胶,速率为0.4ml/min。通过同心轴针管(14g-23g,即内针头直径0.36mm,外针头直径1.6mm)和注射器a、注射器b连通,其中,注射器a和内针头相连通,注射器b和外针头相连通。在同心轴针头出口处,液态金属和液态硅橡胶原位集成,形成导电纤维。液态作为芯层导电材料,硅橡胶作为壳包层材料。采用石英玻璃管螺旋收集导电纤维,在收集的同时采用红外灯(2000w)进行同步加热固化,形成可用于编织的导电纤维。将导电纤维编织成可穿戴织物,基于摩擦纳米发电机技术,形成自供能智能传感器。
79.实施例2
80.本实施提供了一种导电纤维,导电纤维包括弹性外壳和被弹性外壳包覆的柔性电极ga
68.5
in
21.5
sn
10
,弹性外壳由流动的液态硅橡胶固化而成。
81.本实施例还提供了一种导电纤维的制备方法,和实施例1的区别在于导电纤维的收集方式不同,具体制备过程如下文。
82.注射器a加入液态金属ga
68.5
in
21.5
sn
10
,注射器b加入液态硅橡胶silastic
tm rbl-9200-40-a/b(a:b=1:1),控制注射器a挤出液态金属,速率为0.02ml/min,同时控制注射器b挤出液态硅橡胶,速率为0.4ml/min。通过同心轴针管(14g-23g,即内针头直径0.36mm,外针头直径1.6mm)和注射器a、注射器b连通,其中,注射器a和内针头相连通,注射器b和外针头相连通。在同心轴针头出口处,液态金属和液态硅橡胶原位集成,形成导电纤维。液态金属作为芯层导电材料,硅橡胶作为壳包层材料。采用石英玻璃管螺旋收集导电纤维,收集结束后用红外灯(2000w)进行旋转加热固化90s,形成可用于编织的导电纤维。
83.进一步,将导电纤维编织成可穿戴织物,基于摩擦纳米发电机技术,形成自供能智能传感器。
84.如图8~图11所示,本实施例1的摩擦纳米发电织物可以直接穿戴于人体的不同部位,包括手指、手腕、手臂以及足底等,并作为可穿戴传感器用于构建可穿戴电子设备,为不同部位的可穿戴电子设备进行自供能,进而记录不同部位运动产生的电信号。
85.具体的,图8为手指部位的可穿戴传感器及其在不同手指运动状态下产生的电信号,根据手指关节转动角度的不同,可穿戴传感器可以检测到不同强度的电信号。图9为手腕部位的可穿戴传感器及其在不同手腕运动状态下产生的电信号,根据手指手腕转动角度的不同,可穿戴传感器可以检测到不同强度的电信号。图10为手臂部位的可穿戴传感器及其在不同手臂运动状态下产生的电信号,根据手臂关节转动角度的不同,可穿戴传感器可以检测到不同强度的电信号。图11为足底部位的可穿戴传感器及其在不同足部运动状态下产生的电信号,根据足底在不同运动状态产生的压力,可穿戴传感器可以检测到不同强度的电信号。
86.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
87.以上实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。
因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1