一种引线键合设备运动平台的制作方法
1.本实用新型涉及半导体封装制造技术领域,特别是涉及到一种引线键合设备运动平台。
背景技术:
2.由于机械加工特别是半导体封装领域对加工速度和精度的要求不断提高,目前高速引线键合设备运动平台普遍采用大推力直线电机驱动及较轻的运动部件实现高速高加速运动。但是当运动平台的速度及加速度提高到一定程度时,运动平台的机械振动开始变得明显。特别是在半导体封装领域使用的二维线性运动平台,往往需要高加速、频繁启停换向、短行程往复运动,此时运动平台振动显著,直接影响了平台的定位精度和平台进入定位进入稳定的时间。
3.通过分析这是由于电机施加动力驱动运动平台运动时,运动平台对电机定子产生反作用力。而目前的引线键合设备运动平台电机定子普遍采用刚性连接直接固定在运动平台底座上,电机定子受到的反作用力会直接传递给运动平台底座,使运动平台底座产生振动,运动平台底座的振动又会传递到运动平台,使运动平台振动,最后影响运动平台的定位精度和稳定速度,因此需要降低电机定子对运动平台底座产生的冲击。
4.现有的层叠式引线键合设备运动平台使用u型直线电机,运动平台高加速运动时,电机推力已经达到其峰值推力,若需继续对运动平台提速必须在负载质量变化不大的情况下采用更大推力直线电机,现有u型直线电机结构限制,要增加电机推力需采用更大的定子磁轭或者加大的动子线圈,这种情况既增大了整个平台的体积,电机推力增加的效果又不明显,也需要提出新的解决办法。
5.另外,现有的层叠式引线键合设备运动平台x向及y向运动部件导轨都直接安装在运动平台底座上,对底座加工精度提出了较高要求,且整个运动平台安装都需要在运动平台底座上装配调试完成,也有待优化。
技术实现要素:
6.针对上述现有技术的不足,本实用新型提供一种引线键合设备运动平台,减小了电机定子对底座的冲击引起的振动,底座及整个运动平台运动更加稳定,使运动平台振动时间缩短,定位精度提高。
7.为了实现本实用新型的目的,本实用新型采用的技术方案如下:
8.第一方面,在本实用新型提供的一个实施例中,提供了一种引线键合设备运动平台,包括平台底座、x向驱动模组、y向驱动模组和运动平台模组。
9.所述x向驱动模组通过x向导轨组件安装在平台底座内部,所述x向驱动模组通过x向动子连接夹爪连接所述运动平台模组的x向运动平台,可驱动x向运动平台沿x向运动。
10.所述y向驱动模组安装在平台底座上后部,所述y向驱动模组通过解耦滑块与所述运动平台模组的工作运动平台连接,可驱动工作运动平台沿y向运动。x向驱动模组和y向驱
动模组同时工作时可驱动工作运动平台在xy平面内线性运动,且其x向与y向运动之间互不干涉。
11.作为本实用新型的进一步方案,所述运动平台模组包括运动平台底板、第一导轨和第二导轨,x向运动平台通过第一导轨安装在运动平台底板上,工作运动平台通过第二导轨安装在x向运动平台上,所述运动平台模组沿x方向安装有第一光栅尺及第一读数头可反馈x向运动平台的x向位置,所述运动平台模组沿y方向安装有第二光栅尺及第二读数头可反馈工作运动平台的y向位置。
12.作为本实用新型的进一步方案,所述x向驱动模组包括x向电机安装底板、x向直线电机、x向动子连接夹爪和x向配重块,所述x向直线电机包括x向直线电机定子和x向直线电机动子,所述x向直线电机定子固定在x向电机安装底板上,x向直线电机动子通过x向动子连接夹爪与x向运动平台连接,x向直线电机定子两端配有x向配重块。
13.作为本实用新型的进一步方案,所述x向驱动模组通过x向导轨组件安装在平台底座内部,且在x向直线电机定子两端与平台底座之间安装有第一缓冲器和第一弹簧。当x向直线电机动子施加推力驱动x向运动平台运动时,x向运动平台会产生反作用力通过x向直线电机动子施加到x向直线电机定子上,使直线电机动子产生与运动平台相反方向的运动,偏离其初始位置。
14.作为本实用新型的进一步方案,所述x向驱动模组的x向直线电机定子两端还安装的x向配重块,可以使x向直线电机定子受到一定大小的反作用力时降低其偏移的行程,有利于其位置保持稳定。
15.作为本实用新型的进一步方案,所述的y向驱动模组包括y向驱动模组底座、y向第一导轨组件、y向第二导轨组件、y向电机安装底板、y向直线电机、y向动子连接臂、解耦滑轨以及解耦滑块,所述y向直线电机包括y向直线电机定子和y向直线电机动子,所述y向电机安装底板通过y向第二导轨组件安装在y向驱动模组底座上,y向直线电机定子安装在y向电机安装底板上,y向直线电机动子通过y向动子连接臂与解耦滑轨相连,y向动子连接臂通过y向第一导轨组件安装在y向驱动模组底座上,解耦滑轨与解耦滑块滑动配合,解耦滑块与工作运动平台相连接。
16.作为本实用新型的进一步方案,所述y相驱动模组还包括第二弹簧、第三弹簧、第二缓冲器和第三缓冲器,所述第二弹簧可对y向直线电机定子施加向后的推力,第三弹簧可对y向直线电机定子施加向前的推力,第二缓冲器可在y向直线电机定子产生向前偏移的速度时对其施加向后的阻尼力,第三缓冲器可在y向直线电机定子产生向后偏移的速度时对其施加向前的阻尼力。
17.作为本实用新型的进一步方案,所述y相驱动模组的y向直线电机定子上面还安装有y向配重块。在y向直线电机动子驱动工作运动平台运动时y向直线电机定子受到反作用力向相反的方向运动偏离初始位置。第二弹簧、第三弹簧和第二缓冲器、以及y向配重块共同作用,使y向直线电机定子保持在其初始位置一定的距离内不发生较大的偏移,并最终使其趋于稳定。
18.作为本实用新型的进一步方案,所述x向直线电机与y向直线电机均采用回字型直线电机,其中直线电机动子截面形状成“回”字形安装在直线电机定子内部,与目前普遍采用的u型直线电机相比,回字形直线电机可以在未增加直线电机定子的磁极对数和磁铁大
小情况下,使用了更多层的动子线圈,更加充分利用磁轭间磁场,直线电机动子推力提升明显,可以使运动平台产生更大加速度。
19.作为本实用新型的进一步方案,所述的x向驱动模组与所述的y向驱动模组在运动平台装配时均可先组装成子装配体,然后再将子装配体安装到平台底座上,这样一方面降低了运动平台装配调试难度,另外可有效降低对平台底座的加工精度要求,降低成本提升良率。
20.与现有技术相比,本实用新型的有益效果是:
21.本实用新型的引线键合设备运动平台与现有层叠式引线键合设备运动平台相比,驱动运动平台运动的直线电机定子通过导轨安装在底座上,当电机定子受到运动平台的反作用力时,电机定子在导轨上产生一定的位移,并且在弹簧弹力和缓冲器阻尼力下趋于稳定。因此直线电机没有直接将反作用力传递给底座,而是通过弹簧和缓冲器柔性传递到底座,直线电机定子对底座的冲击大大减弱。采用此种结构明显减小了电机定子对底座的冲击引起的振动,底座及整个运动平台运动更加稳定,运动平台停止定位时稳定时间明显加快,使运动平台振动时间缩短,定位精度提高;作为驱动的电机采用“回”字形直线电机,电机推力提高,运动平台运动的加速度及速度得到提升,运动平台运动模组及驱动模组可以独立于底座进行模块化安装,装配调试难度降低,底座加工精度要求下降,可以提高生产效率,降低生产成本。
附图说明
22.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例。
23.图1为本实用新型实施例的引线键合设备运动平台的立体结构示意图。
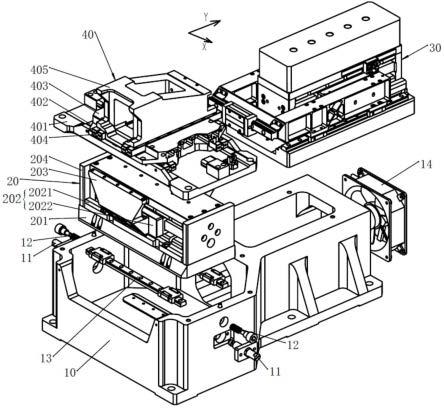
24.图2为本实用新型实施例的引线键合设备运动平台的爆炸图。
25.图3为本实用新型实施例的引线键合设备运动平台沿y方向的一个剖面图。
26.图4为本实用新型实施例的引线键合设备运动平台中y向驱动模组的爆炸图。
27.附图标记说明:
28.10、平台底座;11、第一缓冲器;12、第一弹簧;13、x向导轨组件;14、风扇;
29.20、x向驱动模组;201、x向电机安装底板;202、x向直线电机;2021、x向直线电机定子;2022、x向直线电机动子;203、x向动子连接夹爪;204、x向配重块;
30.30、y向驱动模组;301、y向驱动模组底座;302、y向第一导轨组件;303、y向第二导轨组件;304、y向电机安装底板;305、y向直线电机;3051、y向直线电机定子;3052、y向直线电机动子;306、y向动子连接臂;307、解耦滑轨;308、解耦滑块;309、y向配重块;310、第二弹簧;311、第二缓冲器;312、第三缓冲器;313、第三弹簧;
31.40、运动平台模组;401、运动平台底板;402、第一导轨;403、x向运动平台;404、第二导轨;405;工作运动平台;406、第一读数头;407、第一光栅尺;408、第二光栅尺;409、第二读数头。
具体实施方式
32.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
33.以下结合附图并通过具体实施方式来进一步说明本实用新型的技术方案。
34.如图1、图2和图4所示,在本实用新型提供的一个实施例中,提供了一种引线键合设备运动平台,包括平台底座10、x向驱动模组20、y向驱动模组30和运动平台模组40。
35.在本实用新型实施例中,所述x向驱动模组20通过x向导轨组件13安装在平台底座10内部,所述x向驱动模组20通过x向动子连接夹爪203连接所述运动平台模组40的x向运动平台403,可驱动x向运动平台403沿x向运动。
36.所述y向驱动模组30安装在平台底座10上后部,所述y向驱动模组30通过解耦滑块308与所述运动平台模组40的工作运动平台405连接,可驱动工作运动平台405沿y向运动。x向驱动模组20和y向驱动模组30同时工作时可驱动工作运动平台405在xy平面内线性运动,且其x向与y向运动之间互不干涉。
37.参见图2和图3所示,所述运动平台模组40还包括运动平台底板401、第一导轨402和第二导轨404,x向运动平台403通过第一导轨402安装在运动平台底板401上,工作运动平台405通过第二导轨404安装在x向运动平台403上,所述运动平台模组40沿x方向安装有第一光栅尺407及第一读数头406可反馈x向运动平台403的x向位置,所述运动平台模组40沿y方向安装有第二光栅尺408及第二读数头409可反馈工作运动平台405的y向位置。
38.参见图2和图3所示,所述x向驱动模组20包括x向电机安装底板201、x向直线电机202、x向动子连接夹爪203和x向配重块204,所述x向直线电机202包括x向直线电机定子2021和x向直线电机动子2022,所述x向直线电机定子2021固定在x向电机安装底板201上,x向直线电机动子2022通过x向动子连接夹爪203与x向运动平台403连接,x向直线电机定子2021两端配有x向配重块204。
39.在本实施例中,所述x向驱动模组20通过x向导轨组件13安装在平台底座10内部,且在x向直线电机定子2021两端与平台底座10之间安装有第一缓冲器11和第一弹簧12。当x向直线电机动子2022施加推力驱动x向运动平台403运动时,x向运动平台403会产生反作用力通过x向直线电机动子2022施加到x向直线电机定子2021上,使x向直线电机定子2021产生与运动平台403相反方向的运动,偏离其初始位置。
40.在本实施例中,第一弹簧12可在x向直线电机定子2021沿x向偏移时对其施加与其偏移位移相反方向的推力,第一缓冲器11可在x向直线电机定子2021沿x向偏移时对其施加与其偏移速度相反方向的阻力,第一缓冲器11和第一弹簧12共同作用可以使x向直线电机定子2021保持在其初始位置一定的距离内不发生较大的偏移,最终趋于稳定。
41.在本实施例中,所述x向驱动模组20的x向直线电机定子2021两端还安装的x向配重块204,可以使x向直线电机定子2021受到一定大小的反作用力时降低其偏移的行程,有利于其位置保持稳定。
42.参见图3和图4所示,所述的y向驱动模组30包括y向驱动模组底座301、y向第一导轨组件302、y向第二导轨组件303、y向电机安装底板304、y向直线电机305、y向动子连接臂306、解耦滑轨307以及解耦滑块308,所述y向直线电机305包括y向直线电机定子3051和y向
直线电机动子3052,所述y向电机安装底板304通过y向第二导轨组件303安装在y向驱动模组底座301上,y向直线电机定子3051安装在y向电机安装底板304上,y向直线电机动子3052通过y向动子连接臂306与解耦滑轨307相连,y向动子连接臂306通过y向第一导轨组件302安装在y向驱动模组底座301上,解耦滑轨307与解耦滑块308滑动配合,解耦滑块308与工作运动平台405相连接。
43.参见图4所示,所述y向驱动模组30还包括第二弹簧310、第三弹簧313、第二缓冲器311和第三缓冲器312,所述第二弹簧310可对y向直线电机定子3051施加向后的推力,第三弹簧313可对y向直线电机定子3051施加向前的推力,第二缓冲器311可在y向直线电机定子3051产生向前偏移的速度时对其施加向后的阻尼力,第三缓冲器312可在y向直线电机定子3051产生向后偏移的速度时对其施加向前的阻尼力。
44.参见图4所示,所述y向驱动模组30的y向直线电机定子3051上面还安装有y向配重块309。在y向直线电机动子3052驱动工作运动平台405运动时y向直线电机定子3051受到反作用力向相反的方向运动偏离初始位置。第二弹簧310、第三弹簧313和第二缓冲器311、312以及y向配重块309共同作用,使y向直线电机定子3051保持在其初始位置一定的距离内不发生较大的偏移,并最终使其趋于稳定。
45.参见图1至图4所示,所述x向直线电机202与y向直线电机305均采用回字型直线电机,其中直线电机动子截面形状成“回”字形安装在直线电机定子内部,与目前普遍采用的u型直线电机相比,回字形直线电机可以在未增加直线电机定子的磁极对数和磁铁大小情况下,使用了更多层的动子线圈,更加充分利用磁轭间磁场,直线电机动子推力提升明显,可以使运动平台产生更大加速度。
46.参见图1至图4所示,所述的x向驱动模组20与所述的y向驱动模组30在运动平台装配时均可先组装成子装配体,然后再将子装配体安装到平台底座10上,这样一方面降低了运动平台装配调试难度,另外可有效降低对平台底座10的加工精度要求,降低成本提升良率。
47.综上所述,本实用新型与现有层叠式引线键合设备运动平台相比,驱动运动平台运动的直线电机定子通过导轨安装在底座上,当电机定子受到运动平台的反作用力时,电机定子在导轨上产生一定的位移,并且在弹簧弹力和缓冲器阻尼力下趋于稳定。因此直线电机没有直接将反作用力传递给底座,而是通过弹簧和缓冲器柔性传递到底座,直线电机定子对底座的冲击大大减弱。采用此种结构明显减小了电机定子对底座的冲击引起的振动,底座及整个运动平台运动更加稳定,运动平台停止定位时稳定时间明显加快,使运动平台振动时间缩短,定位精度提高;作为驱动的电机采用“回”字形直线电机,电机推力提高,运动平台运动的加速度及速度得到提升,运动平台运动模组及驱动模组可以独立于底座进行模块化安装,装配调试难度降低,底座加工精度要求下降,可以提高生产效率,降低生产成本。
48.本实用新型采用回字形直线电机进行驱动,提高了电机推力,可以进一步提升运动平台的加速度。本实用新型中x向驱动模组与y向驱动模组可单独组装成子装配体然后再进行运动平台装配,简化了运动平台装配调试难度,有利于提高生产效率。
49.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型
的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1