高速圆柱锂电池自动点底焊、放绝缘片、滚槽一体机的制作方法
1.本实用新型涉及圆柱锂电池生产技术领域,特别是涉及一种高速圆柱锂电池自动点底焊、放绝缘片、滚槽一体机。
背景技术:
2.圆柱锂电池生产过程中,为了节省设备的空间占用,常用回转式结构带动圆柱锂电池做圆周运动依次完成点底焊、放绝缘片和滚槽工序,结构布局紧凑。这种结构虽然节省了空间占用,但是整机的效率较低,同时由于结构紧凑,导致调试和维护操作极为不便。
技术实现要素:
3.本实用新型的目的在于克服以上所述的缺点,提供一种高速圆柱锂电池自动点底焊、放绝缘片、滚槽一体机。
4.为实现上述目的,本实用新型的具体方案如下:
5.一种高速圆柱锂电池自动点底焊、放绝缘片、滚槽一体机,包括机架台、点焊装置、旋转工作台和滚槽装置;
6.所述点焊装置安装在机架台的一端上,所述点焊装置包括有第一输送料槽、第一分料机构、自动点焊机构、第一送料机构和进料推料机构;
7.所述第一输送料槽具有送料口以及分布于送料口左右两侧的第一左料通道和第一右料通道,所述第一左料通道和第一右料通道的一端分别对应与送料口连通,所述第一分料机构设于第一输送料槽上并与送料口的位置对应,两个自动点焊机构分别一一对应第一左料通道和第一右料通道的位置安装在机架台上,所述第一送料机构的一端与第一左料通道和第一右料通道均连接,所述进料推料机构对应设于第一送料机构的另一端上;
8.所述旋转工作台安装在机架台的中部,所述旋转工作台沿周向均布有电池载具,所述旋转工作台外侧沿逆时针方向依次设置有一次校极耳机构、拉力测试机构、压电芯机构、冲放绝缘片机构、绝缘片检测机构、短路检测机构、良品出料机构和第二次品出料机构;
9.所述滚槽装置安装在机架台的另一端,且与良品出料机构的位置对应。
10.本实用新型的有益效果为:本实用新型通过设置两个自动点焊机构配合第一左料通道和第一右料通道,从而同时进行两条路径的圆柱锂电池的自动点焊作业,提到圆柱锂电池的自动点焊的工作效率,从而提高整机效率,同时利用第一送料机构对自动点焊后的圆柱锂电池进行送料,结合进料推料机构将圆柱锂电池朝向旋转工作台进行供料,使得圆柱锂电池在旋转工作台上进行放绝缘片工序后进入滚槽装置进行滚槽工序,从而完成圆柱锂电池的生产作业,整体结构布局相对宽松,便于后续调试维护。
附图说明
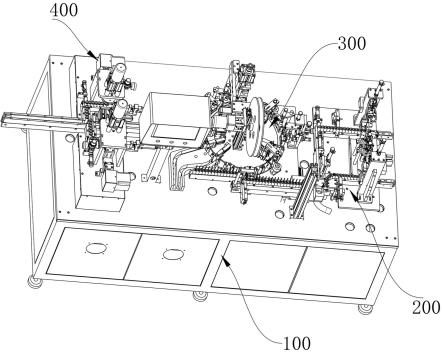
11.图1是本实用新型的立体图;
12.图2是本实用新型另一视角的立体图;
13.图3是本实用新型的点焊装置的结构示意图;
14.图4是本实用新型的点焊装置另一视角的结构示意图;
15.图5是本实用新型的自动点焊机构的立体图;
16.图6是本实用新型的拔针机构的立体图;
17.图7是本实用新型的第一分料机构安装在第一输送料槽上的结构示意图;
18.图8是本实用新型的点焊装置的部分结构示意图;
19.图9是本实用新型的滚槽装置的结构示意图;
20.图10是本实用新型的滚槽装置另一视角的结构示意图;
21.图11是本实用新型的滚槽成型机构的结构示意图;
22.图12是本实用新型的滚槽成型机构另一视角的结构示意图;
23.图13是本实用新型的旋转工作台的结构示意图;
24.图14是本实用新型的旋转工作台另一视角的结构示意图;
25.附图标记说明:100、机架台;200、点焊装置;201、第一输送料槽;202、第一分料机构;203、自动点焊机构;204、第一送料机构;205、进料推料机构;206、拔针机构;207、焊针检测机构;208、第一次品出料机构;209、点焊ng推出机构;210、探孔检测机构;
26.10、点焊座体;11、压钢壳气缸;12、压钢壳定位模具;13、定位气缸;14、定位块;15、点焊下模;16、下模弹簧;
27.20、第一拔针座;21、第二拔针座;22、平移气缸;23、升降气缸;24、夹针气缸;25、拔针滑块;26、焊针回收管;
28.30、检测支架;31、焊针感应器;
29.40、插针气缸;41、压焊针气缸;42、第一焊针滑座;43、第二焊针滑座;44、点焊针;
30.50、第一分料气缸;51、第一分料块;
31.300、旋转工作台;301、电池载具;302、一次校极耳机构;303、拉力测试机构;304、压电芯机构;305、冲放绝缘片机构;306、绝缘片检测机构;307、短路检测机构;308、良品出料机构;309、第二次品出料机构;310、打极耳机构;311、二次校极耳机构;312、压绝缘片机构;313、第三次品出料机构;
32.400、滚槽装置;401、第二送料机构;402、第二输送料槽;403、第三送料机构;404、第二分料机构;405、滚槽成型机构;
33.60、滚槽支座;61、滚槽座体;62、滚槽上模;63、滚槽下模;64、滚刀组件;65、下模驱动电机;66、滚槽步进电机;67、滚槽推料组件;68、滚槽出料组件;
34.70、第二分料气缸;71、第二分料块。
具体实施方式
35.下面结合附图和具体实施例对本实用新型作进一步详细的说明,并不是把本实用新型的实施范围局限于此。
36.实施例一:
37.如图1至图14所示,本实施例所述的一种高速圆柱锂电池自动点底焊、放绝缘片、滚槽一体机,包括机架台100、点焊装置200、旋转工作台300和滚槽装置400;
38.点焊装置200安装在机架台100的一端上,点焊装置200包括有第一输送料槽201、
第一分料机构202、自动点焊机构203、第一送料机构204和进料推料机构205;第一输送料槽201具有送料口以及分布于送料口左右两侧的第一左料通道和第一右料通道,第一左料通道和第一右料通道的一端分别对应与送料口连通,第一分料机构202设于第一输送料槽201上并与送料口的位置对应,两个自动点焊机构203分别一一对应第一左料通道和第一右料通道的位置安装在机架台100上,第一送料机构204的一端与第一左料通道和第一右料通道均连接,所述进料推料机构205对应设于第一送料机构204的另一端上;具体地,第一左料通道和第一右料通道均具有拐角,在每个拐角对应的位置分别对应设置推料组件,以保证圆柱锂电池能够沿着第一左料通道或第二右料通道移动;第一送料机构204采用皮带送料结构。
39.旋转工作台300安装在机架台100的中部,旋转工作台300沿周向均布有电池载具301,电池载具301的外侧贯穿设置有开口,便于圆柱锂电池进出,旋转工作台300外侧沿逆时针方向依次设置有一次校极耳机构302、拉力测试机构303、压电芯机构304、冲放绝缘片机构305、绝缘片检测机构306、短路检测机构307、良品出料机构308和第二次品出料机构309;
40.滚槽装置400安装在机架台100的另一端,且与良品出料机构308的位置对应。
41.本实施例通过设置两个自动点焊机构203配合第一左料通道和第一右料通道,从而同时进行两条路径的圆柱锂电池的自动点焊作业,提到圆柱锂电池的自动点焊的工作效率,从而提高整机效率,同时利用第一送料机构204对自动点焊后的圆柱锂电池进行送料,结合进料推料机构205将圆柱锂电池朝向旋转工作台300进行供料,使得圆柱锂电池在旋转工作台300上进行放绝缘片工序后进入滚槽装置400进行滚槽工序,从而完成圆柱锂电池的生产作业,整体结构布局相对宽松,便于后续调试维护。
42.本实施例中,自动点焊机构203包括有点焊座体10、压钢壳气缸11、压钢壳定位模具12、定位气缸13、定位块14、点焊下模15和下模弹簧16,点焊座体10直立固定在机架台100上,压钢壳气缸11安装在点焊座体10上,压钢壳定位模具12滑动连接在点焊座体10上,压钢壳气缸11的输出端与压钢壳定位模具12连接,定位气缸13对应压钢壳定位模具12的位置设于点焊座体10的外侧,定位块14固定连接在定位气缸13的输出端上,点焊下模15通过下模弹簧16弹性设于压钢壳定位模具12的正下方;具体地,定位块14的一侧设有与圆柱锂电池外壁相适配的凹槽,在圆柱锂电池移动至与定位块14对应时,定位气缸13带动定位块14推出,使得圆柱锂电池位于凹槽内,对圆柱锂电池进行定位在压钢壳定位模具12的正下方,此时圆柱锂电池支撑于点焊下模15上,然后压钢壳气缸11带动压钢壳定位模具12下探,使得下模弹簧16压缩,直至圆柱锂电池固定住,然后对圆柱锂电池进行点底焊作业。
43.本实施例中,所述点焊装置200还包括有拔针机构206、焊针检测机构207和第一次品出料机构208,所述拔针机构206对应设于第一送料机构204的一端上,所述焊针检测机构207对应设于第一送料机构204的另一端上,所述第一次品出料机构208对应设于第一送料机构204的另一端上并与进料推料机构205相互垂直设置;具体地,第一送料机构204的另一端设有相互垂直设置的进料通道和出料通道,以便进料推料机构205将圆柱锂电池推入进料通道内,第一次品出料机构208将不良品推入出料通道,实现良品与不良品的分流;本实施例通过设置拨针机构,以对圆柱锂电池上预先人工插接的焊针进行拔出,以便进入后续的工序作业,同时通过设置焊针检测机构207,对经过拔针机构206作业的圆柱锂电池进行
检测是否仍有焊针,同时利用第一次品出料机构208对仍插接有的焊针的圆柱锂电池推出,保证进入旋转工作台300上的圆柱锂电池上没有焊针,保障后续工序的可靠运行。
44.本实施例的工作方式是:人工连续将插接有焊针的圆柱锂电池置于送料口位置,经过第一分料机构202的分料作用,使得圆柱锂电池依次交替进入第一左料通道和第一右料通道内,然后各自与第一左料通道和第一右料通道对应的自动点焊机构203对经过的圆柱锂电池进行点底焊处理,第一左料通道和第一右料通道上经过点底焊处理后的圆柱锂电池均移动至第一送料机构204上,然后第一送料机构204带动圆柱锂电池朝向进料推料机构205方向移动,拔针机构206对经过的圆柱锂电池进行拔针处理,将圆柱锂电池上的焊针拔掉,拔掉焊针后的圆柱锂电池继续跟随第一送料机构204移动至与进料推料机构205相对时,进料推料机构205推动圆柱锂电池经过焊针检测机构207的下方,焊针检测机构207检测圆柱锂电池上是否已经拔除掉焊针,在检测到圆柱锂电池上还存在有焊针时,第一次品出料机构208将该圆柱锂电池推出;在检测到圆柱锂电池上不存在焊针时,随着进料推料机构205的推动,圆柱锂电池进入旋转工作台300的电池载具301上,如此实现将点底焊合格的圆柱锂电池输送至旋转工作台300上进行后续工序的处理;
45.旋转工作台300带动圆柱锂电池沿逆时针转动,各个工序机构依次工作,通过一次校极耳机构302对圆柱锂电池的极耳进行校准,通过拉力测试机构303对焊接的极耳的焊接牢固性进行检测,通过压电芯机构304对圆柱锂电池的电芯部分进行回压,便于后续工序的进行,通过冲放绝缘片机构305将绝缘片冲压在圆柱锂电池上表面,通过绝缘片检测机构306对冲压的绝缘片进行检测,通过短路检测机构307对圆柱锂电池进行短路检测,对于检测合格的圆柱锂电池通过良品出料机构308推入滚槽装置400内,对于检测不合格的圆柱锂电池通过第二次品出料机构309进行推出,避免不合格的圆柱锂电池进入滚槽装置400内,然后检测合格的圆柱锂电池通过滚槽装置400进行滚槽和出料,最终完成圆柱锂电池的自动底焊滚槽工序,整体生产效率更高,结构布局也更为合理便于调试维护。
46.本实施例中,在一次校极耳机构302与拉力测试机构303之间还设置有打极耳机构310,以确保后续拉力测试的可靠运行,避免因极耳位置偏差而导致无法进行拉力测试,增加整机的稼动率。
47.本实施例中,在压电芯机构304和冲放绝缘片机构305之间还设置有二次校极耳机构311,以便圆柱锂电池能够后续冲放绝缘片机构305的作用下可靠进行冲压绝缘片,利于减少不良品的产生,产品合格率更高。
48.本实施例中,在冲放绝缘片机构305和绝缘片检测机构306之间还设置有压绝缘片机构312,通过设置压绝缘片机构312,使得绝缘片的装配更加可靠,利于提高良品率。
49.本实施例中,拔针机构206包括有第一拔针座20、第二拔针座21、平移气缸22、升降气缸23、夹针气缸24、拔针滑块25和焊针回收管26;第一拔针座20竖直设于机架台100上,第二拔针座21固定在第一拔针座20上并与第一拔针座20垂直设置,平移气缸22安装第二拔针座21上,拔针滑块25滑动连接在第二拔针座21上并与平移气缸22的输出端连接,升降气缸23安装在拔针滑块25上,夹针气缸24安装在升降气缸23的输出端上。
50.具体地,圆柱锂电池自动点焊完成后移动至与拔针机构206的位置对应,然后平移气缸22推动拔针滑块25移动,使得夹针气缸24位于圆柱锂电池的正上方,然后升降气缸23推动夹针气缸24下探,接着夹针气缸24对圆柱锂电池上的焊针进行夹持,然后升降气缸23
带动夹针气缸24上移,直至将焊针从圆柱锂电池上拔出,然后平移气缸22推动拔针滑块25朝向焊针回收管26移动,然后夹针气缸24将焊针释放至焊针回收管26内,由焊针回收管26排出进行集中回收,从而实现自动拔针工序。
51.本实施例中,焊针检测机构207包括有检测支架30和焊针感应器31,检测支架30固定在第一送料机构204的另一端上,焊针感应器31安装在检测支架30上并位于第一送料机构204的上方。具体地,圆柱锂电池在进料推料机构205的推动下从焊针感应器31的下方通过,焊针感应器31对圆柱锂电池进行感应,当感应到圆柱锂电池上有焊针时,第一次品出料机构208将该圆柱锂电池推出,避免盖圆柱锂电池的推动下进入旋转工作台300上的电池载具301上,保证旋转工作台300上各个工序的可靠运行。
52.具体地,进料推料机构205包括第一推料气缸和进料推块,所述进料推块与第一推料气缸的输出端固定连接;第一次品出料机构208包括第一出料气缸和第一出料推块,第一出料推块与第一出料气缸的输出端固定连接,以便在第一出料气缸的驱动下进行推料操作;第二次品出料机构309包括第二出料气缸和第二出料推块,第二出料推块与第二出料气缸的输出端固定连接,以便在第二出料气缸的驱动下进行推料操作。
53.本实施例中,还包括有旋转工作台300还设置有第三次品出料机构313,第二次品出料机构309位于良品出料机构308与第三次品出料机构313之间。通过第三次品出料机构313,将冲压绝缘片不合格、拉力测试不合格等可再次回收生产的圆柱锂电池推出,以与短路测试不合格的圆柱锂电池区分开收集,避免造成混料。
54.本实施例中,点焊装置200还包括有两个点焊ng推出机构209,以将点焊不合格的圆柱锂电池从第一输送料槽201推出,一个点焊ng推出机构209对应设于第一左料通道的外侧,另一个点焊ng推出机构209对应设于第一右料通道的外侧。本实施例通过设置点焊ng推出机构209,通过点焊ng推出机构209将点焊不合格的圆柱锂电池推出第一输送料槽201,避免不良品进入下一个工序二占用时间和故障率,结构更为合理、可靠。具体地,点焊ng推出机构209包括有第三出料气缸和第三出料推块,第三出料推块与第三出料气缸的输出端固定连接,以便在第三出料气缸的驱动下进行推料操作。
55.基于上述实施例的基础上,进一步地,第一分料机构202包括有第一分料气缸50和第一分料块51,第一分料气缸50安装在第一输送料槽201上,第一分料块51对应送料口的位置滑动连接在第一输送料槽201上并与第一分料气缸50的输出端连接。实际使用时,通过第一分料气缸50带动第一分料块51往复运动,从而将圆柱锂电池依次交替推入第一左料通道和第一右料通道,从而实现两道自动点焊工序能够同时进行,提高整机效率。
56.基于上述实施例的基础上,进一步地,滚槽装置400包括第二送料机构401、第二输送料槽402、第三送料机构403、第二分料机构404和滚槽成型机构405,第二送料机构401的一端与良品出料机构308的位置对应,第二输送料槽402具有相对设置的第二左料通道和第二右料通道,第二左料通道和第二右料通道的一端均与第二送料机构401的另一端连接,第三送料机构403的一端与第二左料通道和第二右料通道的另一端均连接,第二分料机构404对应第二送料机构401的另一端位置设置,两个滚槽成型机构405分别一一对应设于第二左料通道和第二右料通道的外侧。具体地,第二左料通道和第二右料通道均具有拐角,在每个拐角位置分别对应设置推料组件,以使得圆柱锂电池能够沿着第二左料通道或第二右料通道移动。
57.实际使用时,良品出料机构308将检测合格的圆柱锂电池推入第二送料机构401上,第二送料机构401不断将圆柱锂电池传送至第二输送料槽402,然后第二分料机构404依次交替将圆柱锂电池推入第二左料通道和第二右料通道内,在圆柱锂电池沿着第二左料通道或第二右料通道移动至对应的滚槽成型机构405的位置对应时,滚槽成型机构405对圆柱锂电池进行滚槽处理,经过滚槽处理后的移动至第三送料机构403上,由第三送料机构403传送出工作区。本实施例通过设置第二左料通道和第二右料通道以及两个滚槽成型机构405,形成两道并行的滚槽工序,从而提高圆柱锂电池的滚槽效率,提高整机生产圆柱锂电池的生产效率,减少整机生产过程中的等待时间。
58.本实施例中,滚槽成型机构405包括有滚槽支座60、滚槽座体61、滚槽上模62、滚槽下模63、滚刀组件64、下模驱动电机65、滚槽步进电机66、滚槽推料组件67和滚槽出料组件68;
59.滚槽支座60固定安装在机架台100上,滚槽座体61固定在滚槽支座60上,滚槽上模62安装在滚槽座体61上,滚槽下模63安装在滚槽下模63的正下方,滚刀组件64活动安装在滚槽支座60上,下模驱动电机65安装在滚槽支座60的下方,下模驱动电机65的输出端与滚槽下模63连接,滚槽步进电机66安装在滚槽支座60上,滚槽步进电机66的输出单与滚刀组件64连接,滚槽推料组件67安装在滚槽支座60上并位于滚槽座体61的一侧,滚槽出料组件68安装在滚槽支座60上并位于滚槽座体61的另一侧。
60.实际使用时,在圆柱锂电池移动至滚槽下模63位置时,滚槽上模62下探至与滚槽下模63配合将圆柱锂电池定位住,然后下模驱动电机65驱动滚槽下模63带动圆柱锂电池转动,同时滚槽步进电机66带动滚刀组件64朝向圆柱锂电池移动,直至在圆柱锂电池上加工出滚槽,完成后,滚槽上模62松开圆柱锂电池,下模驱动电机65停止转动,然后滚槽加工完成后的圆柱锂电池在下一个圆柱锂电池的推动下移出,然后进行下一个圆柱锂电池的滚槽工序作业。
61.本实施例中,第二分料机构404包括有第二分料气缸70和第二分料块71,第二分料气缸70安装在第二输送料槽402上,第二分料块71对应送料口的位置滑动连接在第二输送料槽402上并与第二分料气缸70的输出端连接。实际使用时,通过第二分料气缸70带动第二分料块71往复运动,从而将圆柱锂电池依次交替推入第二左料通道和第二右料通道,从而实现两道滚槽工序能够同时进行,提高整机效率。
62.实施例二:
63.如图1至图5、图7至图14所示,本实施例的结构与实施例一的区别在于,本实施例的点焊装置200还包括有两个探孔检测机构210,两个探孔检测机构210分别一一对应设于第一左料通道和第一右料通道的一端上方;自动点焊机构203还包括有插针气缸40、压焊针气缸41、第一焊针滑座42、第二焊针滑座43和点焊针44,插针气缸40安装在点焊座体10的顶端,第一焊针滑座42滑动连接在点焊座体10的上端,插针气缸40的输出端与第一焊针滑座42固定连接,压焊针气缸41安装在第一焊针滑座42上,第二焊针滑座43滑动连接在第一焊针滑座42上,压焊针气缸41的输出端与第二焊针滑座43固定连接,点焊针44的一端连接在第二焊针滑座43上,点焊针44的另一端能够贯穿于压钢壳定位模具12上的钢壳;其余结构与实施例一相同,这里不再赘述。
64.本实施例的工作方式与实施例一的工作方式不同在于,本实施例无需设置拔针机
构206、焊针机构和第一次品出料机构208工作,在圆柱锂电池移动至第一左料通道或第二右料通道时,对应的探孔检测机构210对圆柱锂电池的焊孔进行检测,以便后续工序的进行,在圆柱锂电池移动至与定位块14对应时,定位气缸13带动定位块14推出,使得圆柱锂电池位于凹槽内,对圆柱锂电池进行定位在压钢壳定位模具12的正下方,此时圆柱锂电池支撑于点焊下模15上,然后压钢壳气缸11带动压钢壳定位模具12下探,使得下模弹簧16压缩,直至圆柱锂电池固定住,然后插针气缸40推动第一焊针滑座42下滑,使得点焊针44下探至贯穿压钢壳定位模具12上的钢壳,然后压焊针气缸41推动第二焊针滑座43带动点焊针44继续下探,直至点焊针44对应插入圆柱锂电池的焊孔内,然后通过点焊针44对极耳进行焊接;焊接完成后,压焊针气缸41带动点焊针44上移,焊接完成后的圆柱锂电池移出,下一个圆柱锂电池与定位块14的位置对应,然后重复上述过程,进行下一个圆柱锂电池的极耳焊接,焊接完成后的圆柱锂电池移动至与进料推料机构205的位置对应时,进料推料机构205将圆柱锂电池推入旋转工作台300的电池载具301上,后续的工序与实施例一的相同,这里不再赘述,如此无需人工预先将焊针插接在圆柱锂电池上,实现整机的自动化生产,进一步提高生产效率。
65.本实施例中,探孔检测机构210包括有探孔支撑柱、探孔气缸和探孔感应头;探孔支撑柱固定在机架台100上,探孔气缸安装探孔支撑柱的顶部,探孔感应头安装在探孔气缸的输出端上。如此通过探孔感应头对圆柱锂电池的焊孔进行检测。
66.以上所述仅是本实用新型的一个较佳实施例,故凡依本实用新型专利申请范围所述的构造、特征及原理所做的等效变化或修饰,包含在本实用新型专利申请的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1