一种三轴透镜动中通天线的制作方法
1.本实用新型涉及卫星通信技术领域,具体涉及一种三轴透镜动中通天线。
背景技术:
2.本实用新型对于背景技术的描述属于与本实用新型相关的相关技术,仅仅是用于说明和便于理解本实用新型的
技术实现要素:
,不应理解为申请人明确认为或推定申请人认为是本实用新型在首次提出申请的申请日的现有技术。
3.随着现代卫星通信技术的快速发展,卫星通信天线的应用越来越广泛。行业现有相关ku/ka双频段通信天线设备整体高度较高,由于俯仰机械转角和波束转角同步等幅,导致天线机械俯仰转动运动包络明显增高;另外,现有天线采用串联三轴形式,俯仰和横滚的实现,均是通过天馈部分整体转动来实现,运动包络、转动惯量、偏心力矩都较大,降低系统的机械固有频率,增加机械共振风险,从而影响系统的稳定和快速响应;目前天线传动链多为齿轮传动,存在传动链齿轮回差,这些均会降低系统跟踪的稳定性、精准性、可靠性。
实用新型内容
4.本实用新型的目的在于提供一种三轴透镜动中通天线,以解决现有的天线横滚运动是通过天馈整体转动实现的,存在转动惯量大,响应速度慢的问题。
5.本实用新型解决上述技术问题的技术方案如下:
6.一种三轴透镜动中通天线,其包括方位转动板以及设置在方位转动板上的天线本体和馈源安装支架;馈源安装支架上设置有指向天线本体球心的馈源喇叭,方位转动板上设置有与馈源喇叭连接的功放盒;方位转动板设置有定心驱动支座,定心驱动支座的顶端与天线本体连接;天线本体的周向间隔设置有多个伸缩件,多个伸缩件均向外张开倾斜设置,伸缩件的顶端与天线本体连接,伸缩件的底端与方位转动板连接;方位转动板上设置有驱动控制器,定心驱动支座和多个伸缩件分别与驱动控制器通信连接。
7.采用上述技术方案的有益效果为:对于动中通系统,需要在载体不断运动过程中保持天线波束对准目标,在对准的过程中,外部传输的信号传输给驱动控制器,驱动控制器接收信号,伸缩件调整伸长长度,从而使得天线本体相对方位转动板进行一定角度的调节,天线本体左右偏转用来实现天线波束的横滚,天线的前后偏转用来实现天线波束的俯仰,从而通过调节驱动天线本体的姿态来调整来实现俯仰及横滚运动,系统进入跟踪状态。考虑到惯性单元的测量数据误差、传动回差等因素,系统进行圆锥扫描,根据接收到的卫星信标电平值大小判断和跟踪软件算法的计算结果执行机构驱动天线始终进行算法扫描,不断修正误差,达到天线始终跟踪保持对准卫星的目的。
8.本技术方案在确保波束转动覆盖面积相同条件下,天线本体的机械转动角度明显减小,通过定心驱动支座与多个伸缩件相配套使用,实现天线本体波束的俯仰和横滚,不再采用传统馈源部分整体齿轮转动的方式,而是采用保持透镜天线本体球心位置不变,通过多个伸缩件来调整透镜天线反射板角度,控制反射板的姿态角度,实现天线的波束的横滚
和俯仰转动的效果,因其自身半球外形及横滚实现的方式,在有限运动包络条件下,天线整体运动轮廓可做的很低,另外,由于馈源部分不需整体转动,横滚转动惯量明显减少,控制精度将大大提升,有利于提高天线系统的整体响应速度和跟踪保持稳定性,而且,还能实现天线跟踪连续过顶功能,有效解决了两轴天线固有的高仰角易丢星的问题。
9.进一步地,天线本体包括反射板以及设置在反射板上的半球透镜,多个伸缩件与反射板连接。
10.进一步地,伸缩件为伺服电动缸,伸缩件的两端分别通过第一虎克铰和第二虎克铰与天线本体和方位转动板连接。
11.进一步地,伸缩件的数量为4,4个伸缩件分别设置有第一编码器。
12.采用上述技术方案的有益效果为:当驱动控制器接收到外部的信号后,调节伸缩件的伸缩量,在伸缩件的两端分别设置第一虎克铰和第二虎克铰,提高了整体的灵活性,有利于高精度连续调节天线本体波束的俯仰和横滚。
13.进一步地,定心驱动支座包括方位电机、安装座以及设置在安装座上并与天线本体连接的球铰座,方位电机的输出轴嵌设在方位转动板中并与安装座连接。
14.进一步地,方位转动板设置有与安装座相配合的凸台,安装座的底部位于凸台中并与凸台连接。
15.进一步地,馈源喇叭包括ka馈源喇叭和ku馈源喇叭,ka馈源喇叭和ku馈源喇叭均指向天线本体的球心,ka馈源喇叭与馈源安装支架连接,ku馈源喇叭通过旋转调节组件转动设置在馈源安装支架上。
16.进一步地,旋转调节组件包括极化电机以及嵌设在馈源安装支架中的转盘,转盘指向天线本体的一侧设置有ku馈源喇叭,转盘远离天线本体的一侧设有第一锥齿轮;极化电机设置在馈源安装支架上,极化电机的输出轴设置有与第一锥齿轮啮合的第二锥齿轮。
17.采用上述技术方案的有益效果为:ka馈源喇叭保持相对固定,ku馈源喇叭相对馈源安装支架可以转动,ka馈源喇叭与ku馈源喇叭之间以一定夹角设置在馈源支架上,放置在透镜天线同侧,降低天线遮挡影响,具备多星多波束跟踪功能,极化电机与馈源支架平行放置,第一锥齿轮通过带第二锥齿轮带动ku馈源喇叭转动,转动ku馈源喇叭来实现ku极化匹配,并且ku馈源喇叭转动范围更大,通过转动使得结构更加紧凑,能够有效降低包络尺寸。
18.本实用新型具有以下有益效果:
19.(1)本实用新型在确保波束转动覆盖面积相同条件下,天线本体的机械转动角度明显减小,通过定心驱动支座与多个伸缩件相配套使用,实现天线本体波束的俯仰和横滚,不再采用传统馈源部分整体齿轮转动的方式,而是采用保持透镜天线本体球心位置不变,通过多个伸缩件来调整透镜天线反射板角度,控制反射板的姿态角度,实现天线的波束的横滚和俯仰转动的效果,因其自身半球外形及横滚实现的方式,在有限运动包络条件下,天线整体运动轮廓可做的很低,另外,由于馈源部分不需整体转动,横滚转动惯量明显减少,控制精度将大大提升,有利于提高天线系统的整体响应速度和跟踪保持稳定性,而且,还能实现天线跟踪连续过顶功能,有效解决了两轴天线固有的高仰角易丢星的问题。
20.(2)本实用新型在伸缩件的两端分别设置第一虎克铰和第二虎克铰,提高了整体的灵活性,有利于高精度连续调节天线本体波束的俯仰和横滚。
21.(3)本实用新型的ka馈源喇叭保持相对固定,ku馈源喇叭相对馈源安装支架可以转动,ka馈源与ku馈源之间以一定夹角设置在馈源支架上,放置在透镜天线同侧,降低天线遮挡影响,具备多星多波束跟踪功能,锥齿轮能够将电机与馈源支架平行放置,使得结构更加紧凑,能够有效降低包络尺寸。
附图说明
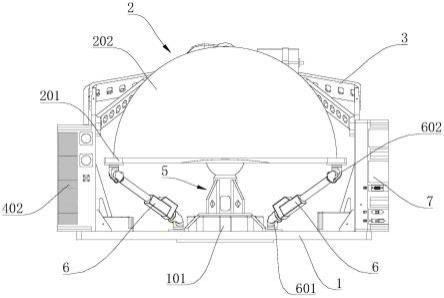
22.图1为本实用新型三轴透镜动中通天线的结构示意图。
23.图2为本实用新型的伸缩件的结构示意图。
24.图3为本实用新型的定心驱动支座的结构示意图。
25.图4为本实用新型的馈源喇叭的结构示意图。
26.图5为本实用新型的旋转调节组件的结构示意图。
27.图中:1-方位转动板;101-凸台;2-天线本体;201-反射板;202-半球透镜;3-馈源安装支架;401-馈源喇叭;411-ka馈源喇叭;412-ku馈源喇叭;402-功放盒;5-定心驱动支座;502-安装座;503-球铰座;504-方位电机;6-伸缩件;601-第一虎克铰;602-第二虎克铰;7-驱动控制器;8-旋转调节组件;801-极化电机;802-转盘;803-第一锥齿轮;804-第二锥齿轮。
具体实施方式
28.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
29.请参照图1,一种三轴透镜动中通天线,其包括方位转动板1以及设置在方位转动板1上的天线本体2和馈源安装支架3;馈源安装支架3上设置有接收端指向天线本体2的馈源喇叭401,方位转动板1上设置有驱动控制器7和馈源喇叭401连接的功放盒402。方位转动板1设置有定心驱动支座5,定心驱动支座5的顶端与天线本体2连接;天线本体2的周向间隔设置有多个伸缩件6,多个伸缩件6均向外张开倾斜设置,伸缩件6的顶端与天线本体2连接,伸缩件6的底端与方位转动板1连接;方位转动板1上设置有驱动控制器7,定心驱动支座5和多个伸缩件6分别与驱动控制器7电性连接。本实用新型在确保波束转动覆盖面积相同条件下,天线本体2的机械转动角度明显减小,通过定心驱动支座5与多个伸缩件6相配套使用,实现天线本体2的俯仰和横滚,不再采用传统馈源部分整体齿轮转动的方式,而是采用保持天线本体2不变,通过电动推杆来调整透镜天线反射板201角度,控制反射板201的姿态角度,实现天线的波束的横滚和俯仰转动的效果。
30.天线本体2包括反射板201以及设置在反射板201上的半球透镜202,在本实施例中,半球透镜202为龙伯透镜。由于透镜为半球结构剖,在反射板201的反射作用,波会经反射板201进行一次反射,在反射板201改变波束的传播方向的同时,减小了天线本体2的整体重量和空间尺寸,能有效减小机械转动角度范围,从而减小天线的整体高度。
31.请参照图2,伸缩件6为伺服电动缸,伸缩件6的两端分别设置有第一虎克铰601和第二虎克铰602,第一虎克铰601设置在靠近定心驱动支座5的位置,第二虎克铰602与反射板201的底部连接。伸缩件6的数量为4,4个伸缩件6分别设置有第一编码器。当驱动控制器7接收到外部的反馈信号后,调节伸缩件6的伸长和收回,在伸缩件6的两端分别设置第一虎
克铰601和第二虎克铰602,提高了整体的灵活性,有利于调节天线本体2波束的俯仰和横滚。设置4个伸缩件6使得天线本体2既能稳固的同时,还可以进行角度的调节,其次馈源部分不需整体随转动,转动惯量明显减少,控制精度将大大提升,有利于提高天线系统的整体响应速度和跟踪保持稳定性,而且,还能实现天线连续过顶功能,有效解决了两轴天线固有的高仰角丢星问题。
32.请参照图3,定心驱动支座5包括方位电机504、安装座502以及设置在安装座502上并与天线本体2连接的球铰座503,在本实施例中,方位转动板1的底面具有凹腔,方位转动板1的上表面设有凸台101,凹腔位于凸台101的内部,方位电机504设在凹腔内,方位转动板1和方位电机504之间设置有第二编码器,第二编码器一端连接方位转动板1,另一端连接方位电机504,第二编码器和方位电机504之间设置有汇流环,汇流环一端连接方位电机504,另一端连接第二编码器,汇流环内设置有同轴旋转关节,同轴旋转关节的转动部分与第二编码器连接,同轴旋转关节的不动部分与方位电机504相连接,此部分第二编码器、同轴旋转关节和汇流环的设置为现有技术在此不再赘述。方位电机504的输出轴嵌设在方位转动板1中并与安装座502连接。方位转动板1设置有与安装座502相配合的凸台101,安装座502的底部位于凸台101中并与凸台101连接,安装座502与凸台101之间设置有轴承。方位电机504工作,方位电机504的输出轴转动,同步地带动方位转动板1转动,也即整体进行转动。
33.请参照图4和图5,馈源安装支架3呈拱形,馈源安装支架3的底部与方位转动板1连接,馈源安装支架3的顶部倾斜一定的角度并位于半球透镜202的外侧。馈源喇叭401设置在馈源安装支架3的顶部中部,馈源喇叭401包括ka馈源喇叭411和ku馈源喇叭412,ka馈源喇叭411和ku馈源喇叭412分别通过馈线波导与功放盒402连接。ka馈源喇叭411和ku馈源喇叭412的接收端均指向天线本体2的球心,也即半球透镜202的球心,ka馈源喇叭411设置在ku馈源喇叭412的上方并与馈源安装支架3连接。ku馈源喇叭412通过旋转调节组件8转动设置在馈源安装支架3上,旋转调节组件8包括极化电机801以及嵌设在馈源安装支架3中的转盘802,转盘802指向天线本体2的一侧设置有ku馈源喇叭412,转盘802远离天线本体2的一侧设有第一锥齿轮803。极化电机801设置在馈源安装支架3上并设置有第二编码器,极化电机801的输出轴设置有与第一锥齿轮803啮合的第二锥齿轮804。ka馈源喇叭411保持相对固定,ku馈源喇叭412相对馈源安装支架3可以转动。通过极化电机801加电可提供转动力矩,ku馈源喇叭412绕喇叭口面回转中心做极化圆周运动,实现对来波极化方向的匹配,馈源与天线本体2之间的刚性增强,在工作环境下,馈源喇叭401与天线本体2之间的相对位置的随机误差明显降低,极化转动范围显著增加,馈线长度的减小有利于提高天线电性能指标降低天线高度,对跟踪性能也有所帮助。
34.天线的工作过程:在对准的过程中,外部传输的信号传输给驱动控制器7,驱动控制器7接收信号,伸缩件6调整伸长长度,从而使得天线本体2相对方位转动板1进行一定角度的调节,天线本体2左右偏转用来实现天线波束的横滚,天线本体2的前后偏转用来实现天线波束的俯仰,从而通过调节驱动天线本体2的姿态来调整来实现俯仰及横滚运动,系统进入跟踪状态。考虑到惯性单元的测量数据误差、传动回差等因素,系统进行圆锥扫描,根据接收到的卫星信标电平值大小判断和跟踪软件算法的计算结果执行机构驱动天线始终进行算法扫描,不断修正误差,达到天线始终跟踪保持对准卫星的目的。
35.以上仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型
的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1