夹爪驱动机构、夹爪机构以及线束夹爪移载装置的制作方法
本发明涉及线束夹爪,具体涉及一种夹爪驱动机构、夹爪机构以及线束夹爪移载装置。
背景技术:
1、线束的铆压、套管以及热缩工艺为线束加工领域的常见工艺形式,包括单根线束的铆压、套管以及热缩加工以及两根线束对接后的铆压、套管以及热缩加工;在两根线束对应加工过程中,传统的方式都是通过人工手动对两根线束进行对接,对接完成后转移至铆压机上在对接部位进行铆压,铆压完成后在铆压部位套管保护,最后再进行热缩,整个工艺过程需要消耗大量的人力和物力,同时加工精度也无法得到保证,影响线束的生产质量。
2、应该注意,上面对技术背景的介绍只是为了方便对本发明的技术方案进行清楚、完整的说明,并方便本领域技术人员的理解而阐述的。不能仅仅因为这些方案在本发明的背景技术部分进行了阐述而认为上述技术方案为本领域技术人员所公知。
技术实现思路
1、为克服上述缺点,本发明的目的在于提供一种夹爪驱动机构、夹爪机构以及线束夹爪移载装置,从而有效地解决上述技术问题。
2、为了达到以上目的,本发明采用的技术方案是:一种夹爪驱动机构,所述夹爪驱动机构用于驱动第一夹爪和第二夹爪在同一导向轴上进行平移;所述夹爪驱动机构包括:
3、驱动装置,所述驱动装置用于驱动所述第一夹爪在所述导向轴上平移;
4、转接块,所述转接块与所述第二夹爪固定连接,与所述第二夹爪同步移动;
5、定位销,所述定位销与所述开设在所述转接块上的定位孔对应设置;
6、伸缩电缸,所述伸缩电缸的底座与所述第一夹爪固定连接,所述伸缩电缸的活塞杆与所述转接块对应设置;
7、锁块,所述锁块可移动地设置在所述转接块上,所述锁块与所述伸缩电缸的活塞杆对应设置。
8、在对线束进行铆压和套管的过程中,由于线束的长度较长,所以需要用两个平行的夹爪同时夹住一根线束,而在两根线束对接的动作中,这两个夹爪需要具备两个夹爪同时运动以及单个夹爪运动,另一个静止不动这两个要求,而上述方案公开了能同时满足这两个动作要求的结构,其具体工作原理为:
9、1、当需要第一夹爪和第二夹爪同时运动时,锁块将伸缩电缸的活塞杆锁住,伸缩电缸不工作,此时伸缩电缸的活塞杆与转接块固定连接,伸缩电缸的底座与第一夹爪固定连接,所以当驱动装置带动第一夹爪平移时,第一夹爪会带动转接块进行同步移动,而转接块又与第二夹爪固定连接,所以第一夹爪和第二夹爪进行同步移动。
10、2、当只需要第一夹爪移动、第二夹爪保持静止不动时,锁块不再将伸缩电缸的活塞杆锁住,伸缩电缸在工作时,其活塞杆可以进行伸缩工作,先通过定位销插入转接块上开设的定位孔,从而对转接块进行限位,使其保持静止不动,此时:
11、如果第一夹爪需要向内侧平移,则让驱动装置不工作,伸缩电缸开始工作,伸缩电缸的活塞杆在伸出时会顶住转接块,而转接块又被限位不能移动,所以伸缩电缸的反作用力会直接作用在于其连接的第一夹爪上,从而实现第一夹爪向内侧移动;
12、如果第一夹爪需要向外侧平移,则让驱动装置工作,伸缩电缸不工作,从此时驱动装置在带动第一夹爪移动时,转接块被限位无法移动,另外,由于伸缩电缸的伸缩缸没有被锁住,所以第一夹爪和转接块之间不存在联动结构,所以即使转接块被限位了,也不会影响第一夹爪的移动。
13、综上所述,上述发明方案的有益效果为:让夹爪机构中的两个夹爪具备同时运动以及单个夹爪运动,另一个静止不动这两个要求,使夹爪运行精确度高,操控性强。
14、进一步地,所述驱动装置包括第一伸缩气缸和连杆,所述连杆的一端与所述第一伸缩气缸的作用端铰接,所述连杆的另一端与所述第一夹爪铰接;第一伸缩气缸与第一夹爪之间采用连杆结构,从而可以将第一伸缩气缸的驱动力转换,从而带动第一夹爪在导向轴上进行平移。
15、进一步地,所述伸缩电缸的活塞杆端部设置有卡块,所述锁块上开设有与所述卡块对应的卡槽;锁块锁住伸缩电缸活塞杆的结构形式为:当活塞杆端部的卡块卡设在锁块上开设的卡槽内时,锁块可以将活塞杆锁住。
16、进一步地,所述定位销连接第二伸缩气缸的作用端,同时所述第二伸缩气缸的作用端还连接压块,所述压块与所述锁块对应设置,所述转接块上设置有复位弹簧,所述复位弹簧与所述锁块连接;定位销通过连接第二伸缩气缸实现升降的功能,同时第二伸缩气缸的作用端还连接压块,具体的工作原理为:
17、弹簧处于初始状态下,伸缩电缸的活塞杆头端伸入转接块内,同时伸缩杆端部的卡块卡在锁块的卡槽内,锁块可以锁住伸缩电缸的活塞杆,此时第一夹爪和第二夹爪可以同步运动;当需要让第二夹爪保持静止、第一夹爪单独运动时,第二伸缩气缸带动定位销下行插入转接块上的定位孔内,对转接块进行限位;同时伸缩气缸带动压块下行,压块下行给锁块施加压力,锁块下行,弹簧被压缩,活塞杆端部的卡块从卡槽内脱离,锁块不再锁住活塞杆,活塞杆可以伸缩,当第二伸缩气缸带动压块上行时,锁块不再受压力,弹簧的回弹力可以是锁块复位继续锁住活塞杆。
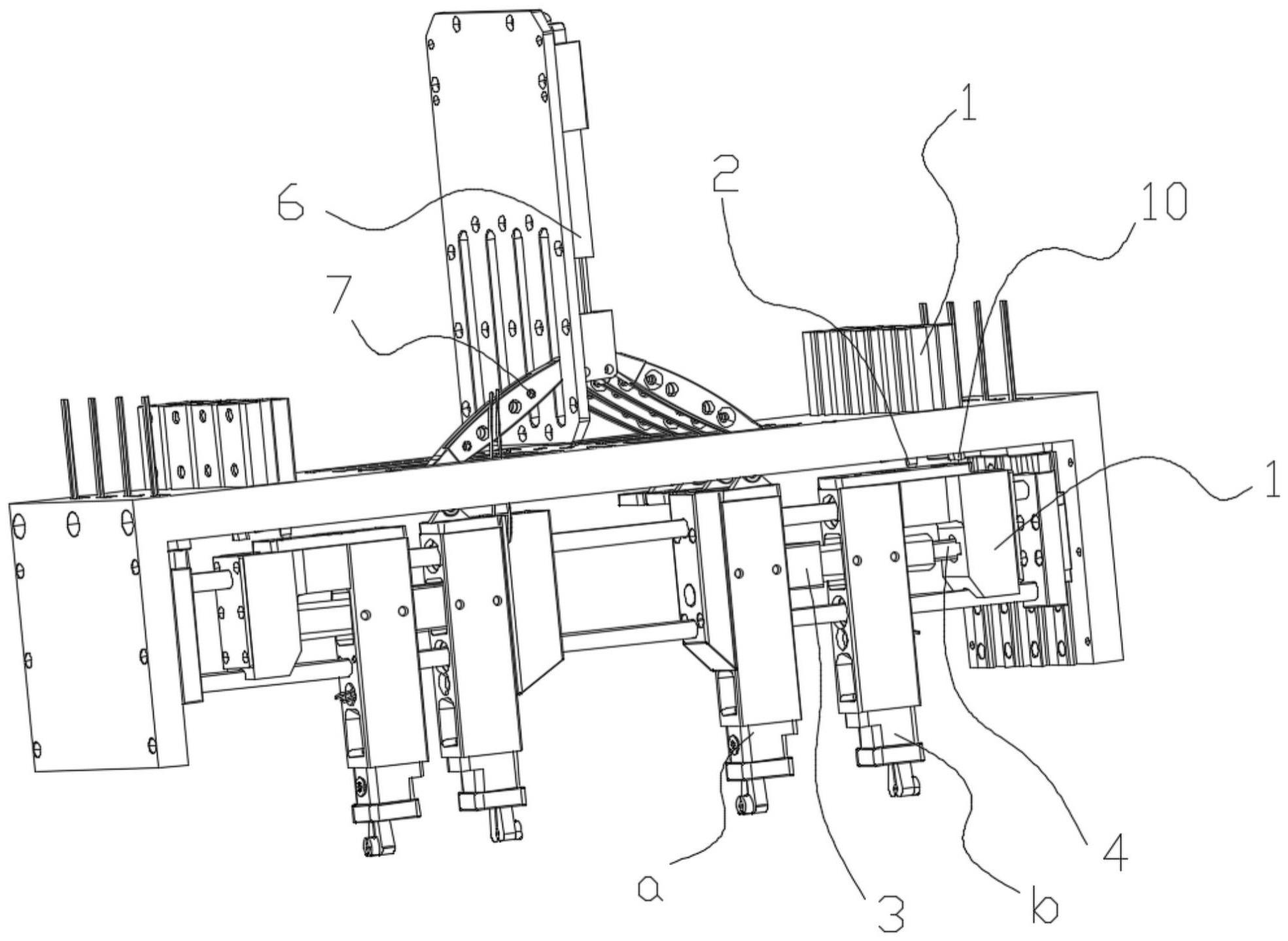
18、本发明还公开了一种夹爪机构,包括:
19、可移动地设置在同一导向轴上的第一夹爪、第二夹爪、第三夹爪以及第四夹爪;
20、上述的夹爪驱动机构,其中一个夹爪驱动机构用于驱动所述第一夹爪和所述第二夹爪在所述导向轴上进行平移,另一个夹爪驱动机构用于驱动所述第三夹爪和所述第四夹爪在所述导向轴上进行平移。
21、在对两根线束进行铆压和套管的过程中,需要先将两根线束从两侧进行对接,对接完成后通过铆压机在两根线束的对接部位进行铆压,铆压完成后要在铆压的部位进行套管,而上述方案公开的一种夹爪机构便能自动完成两根线束铆压和套管的全过程,具体原理为:
22、通过第一夹爪和第二夹爪夹取第一根线束,通过第三夹爪和第四夹爪夹取第二根线束,由于第一夹爪和第二夹爪、第三夹爪和第四夹爪这两组夹爪都通过上述方案中的夹爪驱动机构来实现,即第一夹爪和第二夹爪可以同步移动,也可以第一夹爪单独移动,第二夹爪静止不动,第三夹爪和第四夹爪可以同步移动,也可以第三夹爪单独移动,第四夹爪静止不动;所以,先控制第一夹爪和第二夹爪同步向内平移,第三夹爪和第四夹爪同步向内平移,这样能让两根线束靠拢,使两根线束的端部有对接点,然后再通过铆压机在对接点进行铆压,铆压完成后,由于线束在铆压之前已经通过其他方式先将需要套在铆接点的套管套在线束上,所以在两根线束铆压完成后,控制第一夹爪和第三夹爪向外平移(此处的第一夹爪和第三夹爪在向外平移时,夹爪的夹块部位松开,并没有夹紧线束,这样第一夹爪和第三夹爪在平移时不会带动线束的头端移动),第一夹爪和第三夹爪向外平移同时,第二夹爪和第四夹爪保持静止不动,当第一夹爪和第三夹爪向外移动至抵靠线束上的套管时,当第一夹爪和第三夹爪停止向外移动,并带着套管开始向内移动,套管移动至两根线束的铆接部位,从而完成铆接部位套管的工作。
23、综上所述,上述发明方案的有益效果为:一组的四个夹爪配合上述方案中夹爪驱动机构,从而能有效地实现两根线束对接、铆压以及套管的一系列的工作,使夹爪运行精确度高,操控性强。
24、进一步地,所述第一夹爪、第二夹爪、第三夹爪以及第四夹爪组成一组夹线结构,用于同时夹取两根线束;所述夹爪机构中设置有若干组结构相同且并列排布的夹线结构;此结构可以实现以两根线束为一组进行双线束铆压套管工作可以多组同时进行,从而有效地提高工作效率。
25、进一步地,所述导向轴的两端设置有滑块,所述滑块可上下移动地设置在安装板上开设的直线轨道上,所述第一夹抓的内侧和所述第三夹爪的内侧都设置有第一磁吸结构;所述安装板上设置有作用于所述滑块的第二磁吸结构;
26、在上述内容中提出的多组双线束套管铆压工作同时进行的内容中,在线束进行铆压时,由于铆压机的工位空间较小,所以需要多组的线束一组一组依次进行铆压;另外,在夹爪夹取线束时,由于线束治具的体积小,也需要多组夹线结构一组一组依次夹线,然而多组的夹线结构是采用并列排布的方式,所以需要采用逐个夹爪伸出后再缩回的动作来完成,其具体原理为:
27、当夹线结构中的夹爪需要进行平移时,位于安装板上的第二磁吸机构会将滑块吸住,从而让滑块不能在直线轨道上移动,这样导向轴无法上下平移,夹线结构中的夹爪也无法上下升降,只能进行平移;
28、当夹线结构中的夹爪需要一组一组依次伸出时,先让第一夹爪和第三夹爪靠拢,使位于第一夹爪和第三夹爪内侧的第一磁吸机构将两个夹爪吸住,同时让位于安装板上的第二磁吸机构不再吸住滑块,这样滑块就能在直线轨道上移动,此时,当伸缩气缸推动连杆时,整组的夹爪会和导向轴一起升降,从而实现逐个夹爪伸出后再缩回的动作。
29、本发明还公开了一种线束夹爪移载装置,包括:
30、上述的夹爪机构;
31、翻转组件,所述翻转组件带动所述夹爪机构进行翻转;
32、平移组件,所述平移组件带动所述夹爪机构进行平移。
33、本发明公开的线束夹爪移载装置具备上述两个方案的结构,从而可以自动完成线束的夹取和转移,辅助线束进行铆压、套管以及热缩等加工,不需要消耗大量的人力和物力,同时加工精度也能得到保证,不影响线束的生产质量。
34、具体的工作原理为:
35、一、线束夹取:线束放置在治具盘内,多组并排的夹线结构需要一组一组依次伸出夹取线束,所以先让第一夹爪和第三夹爪靠拢,使位于第一夹爪和第三夹爪内侧的第一磁吸机构将两个夹爪吸住,同时让位于安装板上的第二磁吸机构不再吸住滑块,这样滑块就能在直线轨道上移动,此时,控制伸缩气缸推动连杆时,一组一组的夹线结构会依次伸出完成夹线动作,将线束从治具盘内夹出。
36、二、线束转运:线束从治具盘上被夹取后,夹爪机构需要带着线束移动至铆压机的工位上进行铆压,所以通过夹爪机构连接的翻转组件和平移组件带动其进行平移和翻转调节角度,当夹爪机构移动至指定位置后,多组并排的夹线结构需要一组一组依次伸出,将线束依次送至铆压机的铆压工位上进行铆压,依次伸出的动作原理与线束夹取时相同。
37、三、双线束对接:在线束进行铆压直接需要将两个线束对接,因为第一根线束是通过第一夹爪和第二夹爪配合夹取的,第二根线束是通过第三夹爪和第四夹爪配合夹取的,所以在第一根线束和第二根线束对接时,先控制第一夹爪和第二夹爪同步向内平移,第三夹爪和第四夹爪同步向内平移,这样能让两根夹爪靠拢,使两根线束的端部有对接点,然后再通过铆压机在对接点进行铆压。
38、四、线束套管:由于线束在铆压之前已经通过其他方式先将需要套在铆接点的套管套在线束上,所以在两根线束铆压完成后,控制第一夹爪和第三夹爪向外平移,第一夹爪和第三夹爪向外平移同时,第二夹爪和第四夹爪保持静止不动,当第一夹爪和第三夹爪向外移动至抵靠线束上的套管时,当第一夹爪和第三夹爪停止向外移动,并带着套管开始向内移动,套管移动至两根线束的铆接部位,从而完成铆接部位套管的工作。
39、五、线束热缩:当线束完成套管工作后,再次通过翻转组件和平移组件配合,使夹爪机构带着线束移动至热缩工位进行热缩。
40、进一步地,所述翻转机构包括底座、悬臂、第一翻转电机以及第二翻转电机,其中:
41、所述悬臂的第一端与所述底座通过第一转轴铰接,所述第一翻转电机连接所述第一转轴;
42、所述悬臂的第二端与所述夹爪机构通过第二转轴铰接,所述第二翻转电机连接所述第二转轴。
43、进一步地,所述平移组件包括横梁,所述横梁上设置有滚珠丝杠电机模组,所述底座与所述滚珠丝杠电机模组中的丝杠螺母固定连接。
- 还没有人留言评论。精彩留言会获得点赞!