电子束晶圆缺陷检测设备的检测准备方法和检测方法与流程
本发明涉及半导体晶圆的缺陷检测领域,尤其涉及一种电子束晶圆缺陷检测设备的检测准备方法和检测方法。
背景技术:
1、大规模集成电路(ic)制造前道工序中需要对有图形晶圆(patterned wafer)进行缺陷检测,以保障良率。这里的所述检测指对晶圆的初检(inspection),对测量精度和检测速度要求均高,必须兼顾。所用的设备就是电子束晶圆缺陷检测(e-beam inspection,简称为ebi)设备,是基于扫描电镜(scanning electron microscope,简称为sem)的电子光学的设备,较普通光学晶圆检测设备例如延时积分(time delay integration,简称为tdi)成像的设备,分辨率要高很多,例如电子束斑/像素尺寸通常可跨20nm–1μm,覆盖该区间的缺陷。当然应用中通常都不是检测整个晶圆,而是选择部分晶粒(die)中的部分待检测区域(testarea,简称为ta)。参考图1,晶圆100中有周期排列的晶粒(die),图中的区域101,102,103,104,105分别为所选不同的待检测晶粒中的ta区域。
2、检测设备
3、参考图2a,示意了一例ebi设备200,其部件包括核心的扫描电镜,扫描电镜中有电子光学镜筒(column)211也就是一种扫描电镜系统,和与其平行的普通光学显微成像系统(optical microscope,即om)212,用于初级晶圆对准(wafer alignment,简称为wa),以及物镜。ebi设备还包括机械运动平台213(stage,在主腔体内,主腔体内可维持高真空),用于放置晶圆214,晶圆搬运系统前端模组(efem)215,其中有机械手(robot)2151和预对准器(pre-aligner)2152,其外可放置晶圆盒(cassette)2153。efem和主腔体之间还有真空过渡室216,主腔体内还有机械手217,用于真空过渡室和机械运动平台之间的晶圆搬运。晶圆上片后是放置在机械运动平台上的静电托盘(e-chuck)上,静电托盘还可有高度微调机制。当然ebi设备还有多级真空泵和真空测量装置(图中未显示)。另外ebi设备还有工业计算机218,其上运行软件219,包括图形用户界面(gui)软件,系统软件,数据库,算法软件和底层硬件驱动、通讯软件等。参考图2b,为一例所述设备中sem系统结构示意图,目前现有技术中各种sem系统结构大同小异,不再细述。sem系统中各主要部件在一起,负责电子束的产生、加速、聚焦、扫描控制,以及从样品上产生的二次电子(secondary electron)和其他电子包括反射电子(backscatted electron,bse)的探测,然后经信号放大和模数转换(a/d),及信号处理等步骤,最终产生sem图像。
4、检测准备方法
5、检测准备仅指设备为其本职工作即缺陷检测工作所做的准备。
6、通常所述ebi设备工作时,先需要创建工作菜单(recipe),其下包括诸多子recipe,其中包括其本职工作即缺陷检测工作前的准备工作的内容即检测准备方法,和其本职工作即缺陷检测工作的内容和步骤。另外也包括确定该类待检测晶圆的所需相关数据,例如晶粒尺寸/周期(die size/pitch),如果要检测内存(memory)类晶圆的话也包括内存尺寸/周期(cell pitch)。具体地讲,所述准备工作包括晶圆对准(wafer alignment,简称为wa),图像灰度优化(image grayscale optimization,简称为igo,主要是优化图像的灰度分布特征简称灰度特征,包括对比度以及和饱和与否,用以提高检测算法的灵敏度,和快速自动聚焦(quick auto focus,简称为qaf)等内容,且各自都有各自需要的数据,例如wa中需要各级匹配模板和匹配位置,igo和qaf都需要在晶圆上的工作位置等。
7、下面是ebi设备工作(执行既定recipe时)的主要步骤(以下均为检测准备方法的步骤):
8、晶圆上片的步骤
9、参考图2a,efem将晶圆从晶圆盒取出并预对准,经真空过渡室,将晶圆至于机械运动平台(stage)上,晶圆的取向(由周期排列的晶粒决定)和中心位置有一定的不确定性,例如分别在±1°和200μm之内,因此需要wa(通常是多级的wa),以将其取向和位置矫正到本职工作即缺陷检测工作所需的精度水平。
10、晶圆对准的步骤
11、这里指的是针对有图形晶圆(patterned wafer)的对准。wa是所有有图形晶圆上片后的必做的也是最重要的第一步准备工作。参考图3,在创建wa recipe时,通常在靠近晶圆中心处采集模板图像300,从中选取模板301或模板302,模板为一子图像/区域,它在图中具有唯一性,且亮度、对比度都须达到既定要求,然后移动晶圆/机械运动平台在一个方向达1或多个晶粒的距离,采集目标图像311,用模板302到其中进行模板匹配,搜寻获最佳匹配位置312。模板匹配常用的算法很多,例如图像相似度算法,包括互相关(normalizedcross correlation,ncc)算法或是基于特征(feature-based)的模板匹配方法,且都在亚像素精度。另外晶圆上晶粒排列在x,y方向上都有周期,晶粒之间为street,业内有标准的尺寸。通常wa有多级,最常见的是3级,最初级用om图像,om的视场(fov)大,而最高级用高放大倍率的sem图像。参考图4a,各级wa中都是用沿同一行(列)多个die中的匹配位置进行模板匹配,如匹配位置411,412,413,414,415,416,依次逐步获取更多远离晶圆中心的模板匹配位置,共同参与,根据匹配结果完成当前一级wa,例如取其中匹配成功的匹配位置拟合直线,来获得晶圆取向角θ,并予以矫正,例如平移晶圆以矫正晶圆位置和反方向转动晶圆/机械运动平台以矫正晶圆的取向;或确立晶圆坐标系和机械运动平台坐标系之间的变换矩阵供将来使用。然后切换到下一级wa,以同样的方法做,直至完成全部各级wa。补充一点,晶圆对准模板匹配位置的选择方式有多种,例如参考图4b,用晶圆上位置421,422,423,424,425(在x,y方向都有匹配点即匹配位置)进行模板匹配也可以实现晶圆对准,方法原理上类似,后文中就用图4a为例来帮助阐述。在完成当前级wa后,过渡到下一级wa,以同样方法,用分辨率更高的图像进行下一级的wa,例如用高放大倍率的om图像或低放大倍率lowmagnification,简称为lm)的sem图像进行wa,最后再用高放大倍率(high magnification,简称为hm)sem图像来进行晶圆对准,以保障所述设备本职工作时的定位精度,可见wa是所述ebi设备正常工作的必要条件,通常是晶圆上片后的第一个准备工作。另外由于涉及一系列机械运动,晶圆对准通常会占据每个晶圆检测的相当大的一部分时间,会直接影响到设备的吞吐量,因此wa的时耗指标至关重要。
12、ebi设备的sem图像采集方式通常可有两种:其一为静态图像采集方式。此时是先由机械运动平台移动到达晶圆上既定图像采集位置,待机械运动平台停止后采集一帧图像,参考图5a,区域501,502,503为晶圆上相邻的晶粒(die),其中分别有待检测区域即ta5011,5021,5031。此时所述ebi设备可到达待检测区域中不同的区域,例如图5a中的区域506,507采集面阵(frame)sem图像。在用sem图像的wa中也可以使用这种静态图像采集方式采集图像,例如区域508为lm sem图像采集位置,采集的是面阵图像。其二为动态图像采集方式,参考图5b,图像采集的同时机械运动平台(stage)/晶圆沿固定方向,例如x方向移动,如同光学线阵相机或tdi相机那样和机械运动平台同步扫描成像,可称之为带状图像,如图中的带状图像511,机械运动平台/晶圆移动方向512,与其垂直的电子束来回扫描方向513。该方式图像采集速度快,使得设备吞吐量大,是目前业内采用的主要方式。另外业内已有多镜筒sem系统和单镜筒多束sem系统,仍然有上述两种sem图像采集方式。
13、定参考点的步骤
14、晶圆对准后,在晶圆坐标系相当于机械运动平台坐标系之间的正确关系的基础上,可以确定晶圆上参考点位置,用于定义晶圆坐标系原点(相对于stage坐标系),实际应用中常有这个需要。通常是在创建recipe时就已经确定了其位置和模板图像,例如用晶圆中心附近street上特制的标识(alignment mark,简称为am)或事先确定的图案(图中某一位置例如中心或左上角为参考点位置),采集了高放大倍率的sem图像例如采集与hm semwa同样分辨率的图像,保存到recipe中。在执行recipe时到既定区域做模板匹配就可以确定所述参考点位置,随后建立起晶圆坐标系。
15、自动聚焦的步骤
16、所述ebi设备在执行本职工作即缺陷检测工作前还需快速自动聚焦(qaf)。这通常因为每个晶圆厚度有变化且sem系统工作参数也会随时间渐渐漂移。图6a中显示sem的焦深范围601。所谓快速,指它通常只改变sem电磁物镜中的电流im这一控制变量,适合于小范围内(失焦不严重时且无明显散光)的焦距调优,无机械运动因此速度快,是直接在待检测晶圆上做的。它不同于设备工作前的全面的、较大变化范围的聚焦度校准,即calibrationauto focus(简称caf),其中还包括校准散光(astigmatism)的校准,通常不仅仅涉及上述电流im,还涉及其他控制变量例如相关控制电压。caf属于设备校准内容,不是执行recipe时做的,超出本发明范围,不再赘述。聚焦度的具体量为focus metric,简称为fm,通常是测量图像中的某种特征例如边缘(包括用不同的边缘提取算子/核和尺度提取的边缘)考察其多寡,相关算法很多。不同测量对象的fm通常不具可比性,同样的fm对不同的测量对象(图像内容有一定的改变时)也不具可比性。可以像caf那样在晶圆旁边的高强度耐用的金属目标(固定于晶圆托盘上)上做,如图6a中的目标602所示,但其表面和晶圆表面高度可能不同,另外长期使用也会因损坏使结果不准。通常大范围搜寻最佳fm的结果如曲线603所示。所谓搜寻就是改变fm对应的控制变量(通常按固定步长)即上述电磁物镜的线圈电流im,采集sem图像测量fm值,获取并采用最大fm时对应的控制变量值,这当然十分耗时。而如果是小范围搜寻最佳fm,如曲线604所示,只需要少数几个点,例如最少需要3点就可以确定峰值(可假定结果呈二次曲线),即最佳焦距度对应的控制变量,例如qaf时的电磁物镜的线圈电流im。但如果电子光学系统(指所述设备上sem系统,且包括软硬件和固件)偏移相对于im的搜寻步长过大的话,对有些设备通常3点不够(找不到峰值),使得qaf结果精度差,系统未能达到最佳的聚焦度。
17、现有技术中通常选择在晶圆上包含x和y方向特征(边缘)的区域做qaf。参考图6b,其中有多个晶粒610,图中有wa匹配位置(也即wa中目标图像采集位置)611和612(如同图4中的匹配位置即目标图像采集位置411和412),也有qaf所用的图像采集位置615或616。另外图中的图像采集位置617可以是用于图像灰度优化即igo(后面会交代)。通常可以用上述匹配位置611或612来确定qaf(也适用于后文中要讲的igo)所需图像采集的相对位置(offset)。
18、所述聚焦度fm的计算,大多是考察图像清晰度/锐度(sharpness),和目标形状相对应,例如计算图像的一维(1d)梯度/边缘提取,具体参下述式(1):
19、
20、其中,式(1)中,b为一常数,▽代表梯度运算或是拉普拉斯运算,g为高斯函数或类似于高斯函数的低通滤波函数,为卷积运算的符号,i为sem图像。另外灰度图像梯度/边缘提取算法在现有技术中存在很多,不再赘述。
21、另外由于本文中只涉及qaf,为方便起见,今后文字上不区分自动聚焦和快速自动聚焦,均指所述的qaf。
22、图像灰度优化的步骤
23、在所述ebi设备进行对晶圆上缺陷进行检测前,要进行图像灰度检验和在必要时进行图像灰度优化(image grayscale optimization,简称为igo)。以8位(bit)图像数据类型为例,可能会出现sem图像直方图过窄即灰度分辨率低,或者高端灰度饱和,或者低端灰度饱和的情况,都不利于缺陷的探测,即难以探测到缺陷和/或容易产生误判,理想的sem图像直方图应该是像图7a中曲线701那样的。通常即使是同类晶圆,不同晶圆在同样位置的sem图像灰度分布可能不同。所述图像灰度优化不是简单的、纯软件的图像直方图操纵(histogram manipulation),这会严重干扰缺陷检测灰度阈值的设定和增加图像噪声,业内通常都是通过优化信号放大器(参考图2b)中的相关工作参数,例如包括gain和offset来进行的,因为最终图像像素的值i和二者有如下式(2)的函数关系:
24、i=c(gain×v+offset)式(2);
25、其中,式(2)中,c为一常数,v为所述信号放大器输入电压。
26、通常的做法是在晶圆上选择图像灰度优化位置,使得在其上采集的sem图像代表灰度最高的材料和灰度最低的材料,如图7b中代表灰度最高的区域721和灰度最低的区域722,在晶圆上同一个图像采集位置,否则需要2个不同的图像采集位置。然后设置灰度优化目标包括最低灰度lo,最高灰度ho和对比度co=ho–lo。然后根据图中测量的实际最低灰度l、最高灰度h以及根据c=h–l中任意2个或全部3个建立评价函数。随后用迭代回归的方法获得最接近灰度优化目标的参数,包括所述gain和offset值。其本身也属现有技术,不再赘述。
27、当前问题
28、上述现有技术有下列明显的问题,特别是所述ebi设备在其本职工作即缺陷检测工作前的检测准备方法中有下列问题,包括:
29、1.上述各准备工作例如wa,qaf,igo等相互独立,缺乏合理的规划,次序混乱,例如有时在做sem wa前做qaf和igo,又有时在其后做或在其前后都做,有时到机械运动平台上专门的样品(chip)上做af后再回到晶圆上做qaf,使得步骤冗余重复,效率低下,未能很好地相互利用,严重影响了设备吞吐量(throughput);
30、2.在做快速qaf时,都在晶圆上待检测区域进行,过程中需要移动晶圆到该区域位置,采集多帧图像,例如qaf至少需要采集3帧图像,且如果控制变量改变步长选择不当的话,或者晶圆厚度、工作距离或设备工作参数改变偏大的话,往往需要更多次采集图像,才能判断相对最佳聚焦状况。这不仅降低了设备吞吐量即throughput,而吞吐量是ebi设备的关键性能之一,另外也增加损坏晶圆的风险,例如极化介质材料使得局部荷电(charging)。
技术实现思路
1、本发明的目的在于提供一种电子束晶圆缺陷检测设备的检测准备方法和检测方法,以解决现有方法中因检测准备方法的步骤紊乱和冗余而导致检测准备方法和检测方法效率低,进而导致设备的吞吐量低的问题(即上述的问题1)。
2、为达此目的,本发明采用以下技术方案:
3、一方面,公开了一种电子束晶圆缺陷检测设备的检测准备方法,包括:在有图形晶圆上片后进行光学显微系统下的晶圆对准、扫描电镜下的多级晶圆对准以及确定晶圆坐标系的参考点,将所述扫描电镜的图像灰度优化和扫描电镜的自动聚焦融入扫描电镜下的多级晶圆对准中;
4、其中,将所述图像灰度优化融入扫描电镜下的多级晶圆对准中包括:在所述扫描电镜下的各级晶圆对准中采集第一帧目标图像后,均判断是否需要实施所述图像灰度优化,当判断结果为是时先实施所述图像灰度优化再继续实施该级晶圆对准,当判断结果为否时继续实施所述该级晶圆对准;
5、其中,将所述自动聚焦融入扫描电镜下的多级晶圆对准中包括:在所述扫描电镜下的第一级晶圆对准中采集第一帧目标图像后,判断是否需要实施所述自动聚焦,当判断结果为是时,在继续实施所述第一级晶圆对准的过程中实施所述自动聚焦,当判断结果为否时继续实施所述第一级晶圆对准。
6、进一步地,所述方法包括依次执行以下步骤:
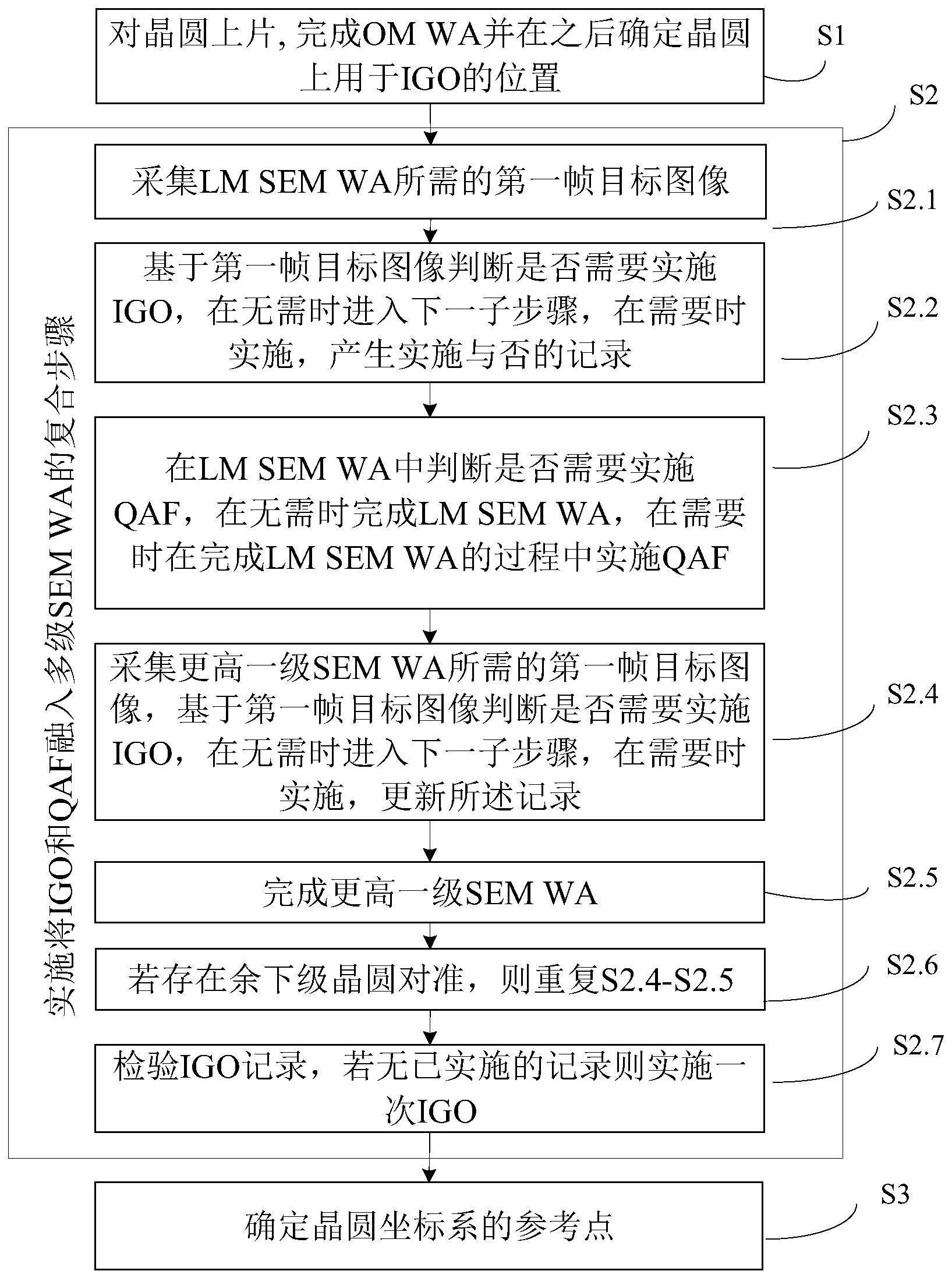
7、s1、对所述晶圆上片,实施光学显微系统下的晶圆对准,并在之后基于设备的工作菜单中保存的用于图像灰度优化的位置和光学显微系统下晶圆对准的结果,确定所述晶圆上用于图像灰度优化的实际位置;
8、s2、实施将所述图像灰度优化和自动聚焦融入扫描电镜下的多级晶圆对准中的复合步骤,包括依次执行的以下子步骤:
9、s2.1、采集所述扫描电镜下的第一级晶圆对准所需的第一帧目标图像;
10、s2.2、基于所述第一帧目标图像判断是否需要实施图像灰度优化,在无需时进入下一子步骤,在需要时基于所述实际位置实施所述图像灰度优化,产生实施与否的记录;
11、s2.3、判断是否需要实施自动聚焦,在无需时继续实施所述第一级晶圆对准,在需要时在继续实施所述第一级晶圆对准过程中实施所述自动聚焦,继续实施实施所述第一级晶圆对准包括:采集所述第一级晶圆对准所需的其余各目标图像,并将所需的所有目标图像分别与所述设备的工作菜单中保存的模板进行模板匹配,根据匹配结果完成所述第一级晶圆对准;
12、s2.4、采集所述扫描电镜下的更高一级晶圆对准所需的第一帧目标图像,基于所述更高一级晶圆对准对应的第一帧目标图像判断是否需要实施图像灰度优化,在无需时进入下一子步骤,在需要时基于所述实际位置实施所述图像灰度优化,更新所述记录;
13、s2.5、采集所述更高一级晶圆对准所需的其余各目标图像,并将其所需的所有目标图像分别与所述设备的工作菜单中保存的模板进行模板匹配,根据匹配结果完成所述更高一级晶圆对准;
14、s2.6、若存在余下级所述晶圆对准,则重复子步骤s2.4-s2.5;
15、s2.7、检验所述记录,若无已实施的记录则基于所述实际位置实施一次所述图像灰度优化。
16、进一步地,在子步骤s2.2中,在所述第一级晶圆对准中检验所述第一帧目标图像的对比度,根据所述对比度和既定的晶圆对准所需对比度阈值的比较判断是否需要实施图像灰度优化;在子步骤s2.4中,在更高一级晶圆对准中检验所述第一帧目标图像的对比度,也是根据所述对比度和所述既定的晶圆对准所需对比度阈值的比较判断是否需要实施图像灰度优化;其中,各个所述图像灰度优化都按所述设备的晶圆检测工作所需对比度阈值进行。
17、进一步地,在子步骤s2.3中,基于所述设备的工作菜单中的模板与第一级晶圆对准时采集的至少一帧目标图像进行模板匹配,以获取与模板成功匹配且与所述工作菜单中所述模板所在的模板图像的重叠区域达标的目标图像,根据所述模板图像与目标图像在所述重叠区域的聚焦度的比较判断是否实施自动聚焦;其中,所述达标指重叠区域面积和特征含量均达到或超过相应的既定阈值。
18、进一步地,当所述模板图像和在工作菜单中保存的第一匹配位置处采集的第一帧目标图像匹配不成功或重叠区域不达标时,采用下面方法之一确定达标的所述目标图像与对应的模板图像:
19、在所述第一匹配位置周边以既定次序的九宫格方式采集图像,从中选择与所述模板图像匹配成功且重叠区域达标的一图像作为达标的目标图像;
20、或保持所述第一帧目标图像不变,使用创建工作菜单时在所述模板图像周边以既定次序的九宫格方式采集的图像,从中选择和所述第一帧目标图像匹配成功且重叠区域达标的图像作为模板图像,并将其作为全部各级晶圆对准的所述模板图像;
21、或依次考察所述第一级晶圆对准中在后续各个匹配位置采集到的目标图像,在其中选择与所述模板图像匹配成功且重叠区域达标的目标图像。
22、进一步地,根据所述模板图像在重叠区域的聚焦度ft和所述目标图像在重叠区域的聚焦度fs的偏差△f和预设阈值的比较判断是否实施自动聚焦。
23、进一步地,所述预设阈值包括第一阈值th1和大于第一阈值的第二阈值th2,比较所述偏差△f与第一阈值th1和第二阈值th2的大小,并执行以下方法之一:
24、当△f≤th1时,判断为否,当前的所述目标图像的聚焦度达标,保存达标的所述聚焦度对应的控制变量,以用于全部各级晶圆对准;
25、当th1<△f≤th2时,判断为是,并实施细搜模式的自动聚焦;
26、当△f>th2时,判断为是,并实施粗搜模式的自动聚焦,所述粗搜模式时预设的步长大于细搜模式时预设的步长;
27、其中,无论细搜模式还是粗搜模式的自动聚焦,均是将当前的所述目标图像对应的当前的控制变量按步长调整形成控制变量空间不同的值,并分配给第一级晶圆对准中匹配位置空间以采集目标图像;所述偏差△f定义为:
28、
29、进一步地,所述细搜模式的自动聚焦包括:在当前的所述控制变量两边以预设的步长δi等间隔取值得到2n个控制变量的值,n≥2,将2n个所述控制变量的值分配到第一匹配位置以外的2n个匹配位置,以采集2n个所述目标图像,获取2n个所述目标图像中成功匹配的m个目标图像,加上当前的所述控制变量对应的起始目标图像共有m+1个目标图像,对准m+1个所述目标图像以获得m+1个所述目标图像的共享重叠区域,在所述共享重叠区域上计算对应的m+1个聚焦度,2≤m≤2n,用这m+1个所述聚焦度中聚焦度峰值和其两边各至少1个聚焦度及对应的控制变量拟合得到聚焦度和控制变量之间的曲线,获取最优聚焦度和对应的控制变量。
30、进一步地,所述粗搜模式时的步长△i和细搜模式时的步长δi有固定比例关系,满足△i=hδi,其中,1<h<10。
31、进一步地,所述粗搜模式的自动聚焦包括:在当前的所述控制变量两边以预设的步长△i等间隔取值得到2p个所述值,p为正整数;将2p个所述值分配到第一匹配位置以外的2p个匹配位置,以采集2p个目标图像,按既定次序逐个获得采集的目标图像和模板图像在重叠区域内的聚焦度的所述偏差△f,比较所述偏差△f与第一阈值th1和第二阈值th2的大小,并执行以下方法之一:
32、当△f≤th1时,认为当前的所述目标图像的聚焦度达标,保存达标的所述聚焦度对应的控制变量,以用于全部各级晶圆对准;
33、当th1<△f≤th2时,终止所述粗搜模式的自动聚焦,进行所述细搜模式的自动聚焦;
34、当△f>th2时,按所述既定次序获得下一个目标图像对应的偏差△f并完成对应的所述比较,在完成2p个所述目标图像对应的所述比较后仍未获得△f≤th2的情况下,对准2p个所述目标图像以获得2p个所述目标图像的共享重叠区域,选择所述共享重叠区域中聚焦度最大的目标图像对应的控制变量,在其周边进行所述细搜模式的自动聚焦,其中,所述细搜模式对应的控制变量具有2q个等间隔取值,且q>n,q为正整数。
35、进一步地,当所述自动聚焦早于所述第一级晶圆对准完成时,用当前的所述自动聚焦所获控制变量设置所述设备的电子光学系统,以用于全部各级所述晶圆对准中后续的目标图像的采集。
36、另一方面,公开了一种电子束晶圆缺陷检测设备的检测方法,包括:使用上述的方法对有图形晶圆实施缺陷检测准备,然后执行所述设备的晶圆检测工作。
37、本发明实施例的有益效果:
38、在本发明实施例中,除去了现有技术中的步骤紊乱和冗余,提升了检测准备方法和检测方法的效率,提升了设备的吞吐量,即解决了上述的问题1。
39、此外,在本发明实施例中实施自动聚焦时,将当前的控制变量按步长调整形成控制变量空间不同的值,并分配给用扫描电镜下的晶圆对准,通常是lmsemwa中匹配位置空间以采集目标图像,利用扫描电镜下的晶圆对准所采集的目标图像实施自动聚焦中的控制变量的搜寻,而非基于在待检测区域采集图像实施自动聚焦,可以节省移动晶圆和采集图像的时间,同时也降低了因图像采集可能造成的局部晶圆损坏的风险,故本发明实施例还解决了上述的问题2。
- 还没有人留言评论。精彩留言会获得点赞!