一种装配式半导体芯片盘片装卸载方法与流程
本发明涉及led加工设备领域,具体涉及一种装配式半导体芯片盘片装卸载方法。
背景技术:
1、半导体芯片盘片(包括晶圆盘片和产品盘片)的装卸载设备,是半导体芯片生产线常用的生产设备,本公司在设计半导体加工设备时,采用的是芯片盘上拉、装卸载结构旋转的方式,目前的加工结构不能满足该方式的加工。申请号202220429554.3的发明专利中公开了一种新型料片装卸载装置,该料片装卸装置中,其通过原料膜片、膜片定位机构、夹紧机构和装载支座的连接结构方式,进行半导体芯片的储存装载,虽然能够稳定的支撑夹住整个盘片,但是当该盘片进行竖向安装或整个装卸载装置进行旋转时,稳定性不好,并且整个结构过于复杂笨重。
技术实现思路
1、本发明的目的在于提供一种装配式半导体芯片盘片装卸载方法,该系统通过新型结构的气动机械手,提高了抓取盘片的效率和准确度,并设置有装配式的组装系统,提高了整体的安装效率。
2、本发明为了实现上述目的,采用的技术解决方案是:
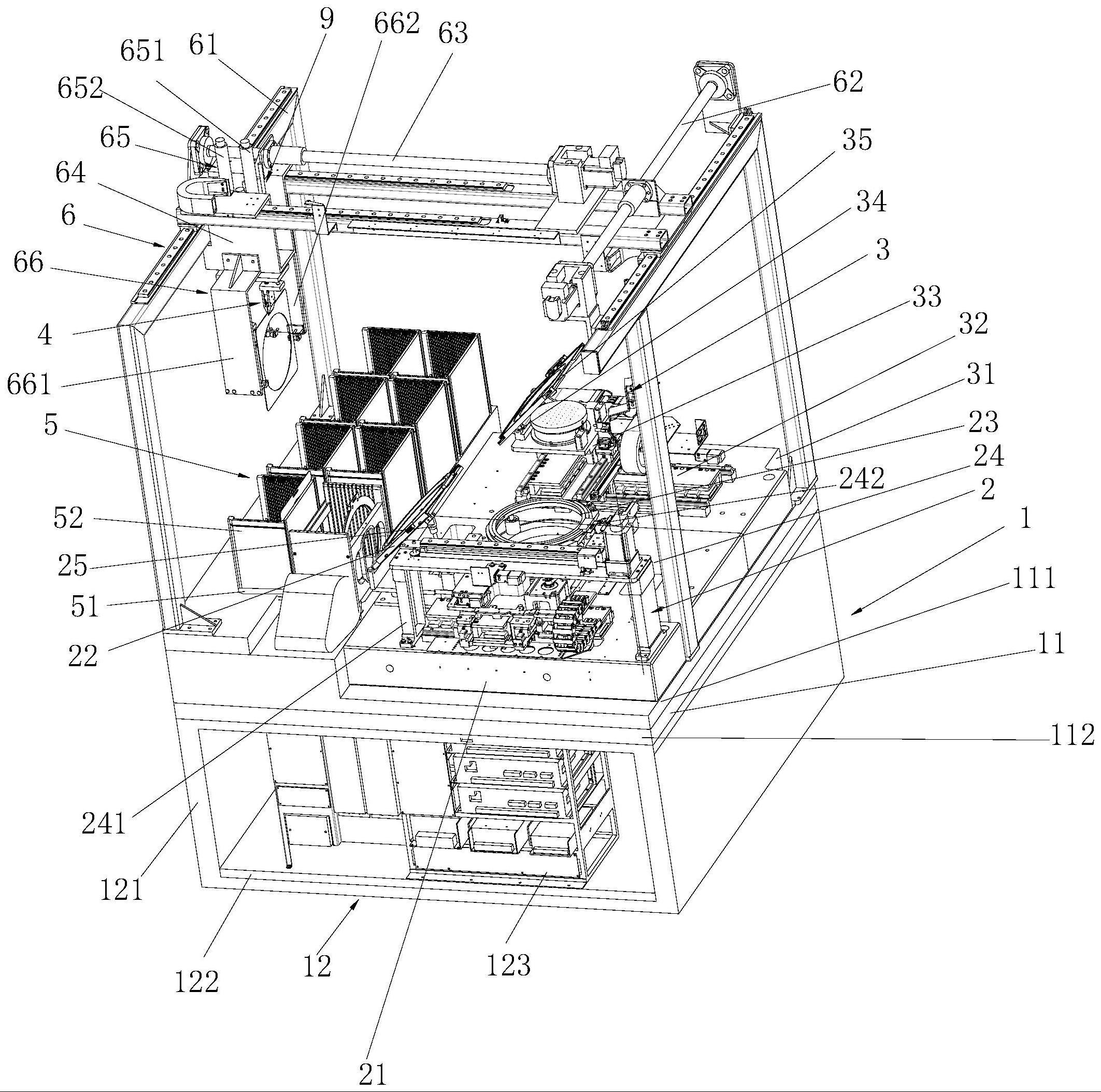
3、一种装配式半导体芯片盘片装卸载方法,采用装配式半导体芯片盘片装卸载系统,该系统包括盘片支撑机构、晶圆盘片缓冲机构、产品盘片缓冲装置、盘片机械手和储盘装置;
4、盘片支撑机构包括盘片撑台和电控系统组件,电控系统组件包括系统撑台和设置在系统撑台内的撑架内垫板、系统控制箱,系统控制箱设置在撑架内垫板上;
5、盘片撑台包括上垫板和下大理石板,下大理石板适配连接在系统撑台上端,上垫板通过第一撑台固定组件连接在大理石板上,上垫板的上端设置有机械手撑架;
6、机械手撑架包括两个倒u形的滑移支杆,两个滑移支杆上设置有横向滑移机构,横向滑移机构连有纵向滑移机构,纵向滑移机构通过机械手插接座连有升降机构,机械手插接座的下端连接有机械手辅撑框架,升降机构下端连接盘片机械手;
7、盘片机械手包括第一夹爪、第二夹爪,升降机构包括第一机械手气缸组件和第二机械手气缸组件,第一机械手气缸组件穿过机械手插接座后连接第一夹爪,第二机械手气缸组件穿过机械手插接座后连接第二夹爪;
8、第一夹爪和第二夹爪均为气动夹持爪组件,所述气动夹爪组件包括夹持支座、第一支撑夹板、第二支撑夹板、气压电磁阀和导向轴套件,夹持支座的下端连有夹持凸块,第一支撑夹板和第二支撑夹板通过导向轴套件连接在夹持凸块的下端,气压电磁阀连接在第一支撑夹板和第二支撑夹板之间;
9、所述储盘装置包括储盘底座和储盘盒,储盘底座上端连接第三位置调节机构,第三位置调节机构上端连接有储盘顶板,储盘顶板的上端设置有多个储盘基座,储料基座上设置有第一基座插接块,储盘盒通过第一基座插接块连接在储盘基座上后通过螺丝固定;
10、装卸载方法具体包括如下:
11、步骤(1)、确定盘片支撑机构、晶圆盘片缓冲机构、产品盘片缓冲装置、盘片机械手和储盘装置的结构尺寸,分别加工装卸载系统中各个部件,并分别装配上述机构和装置;
12、步骤(2)、安装盘片支撑机构、晶圆盘片缓冲机构、产品盘片缓冲装置,在机械手插接座上开设多个用于插接座定位孔,通过插接座定位孔进行升降机构的定位安装;
13、步骤(3)、调整横向滑移机构、纵向滑移机构、升降机构的结构位置,保证顺畅度并进行夹取试验操作;试验操作时,系统控制箱对移动的滑移机构和升降机构通电控制,夹住盘片后插接到储盘盒内,若位置有误差,拔出储盘盒后进行型号的更换或固定螺丝的调整,保证储盘盒能与升降机构的相对位置精准对接;
14、步骤(4)、确定系统中的其余加工结构和电气系统,确定无误后,储盘盒内装载试验晶片,整个设备先进行分选预处理试验工作,确定工作是否正常;
15、步骤(5)通过横向滑移机构、纵向滑移机构、升降机构的控制,盘片机械手进行空间内相对位置的移动;夹取时,盘片机械手中的第一夹爪可对储盘装置中的盘片进行夹取,此时第二夹爪可分别对晶圆盘片缓冲机构或产品盘片缓冲装置中的盘片进行夹取;
16、步骤(6)、盘片机械手将装有晶圆的盘片夹取至晶圆盘片缓冲机构上,将普通空盘片夹取至产品盘片缓冲装置上,通过装卸载系统进行分选后,晶圆盘片缓冲机构上的合格的晶圆被分选至普通空盘片上从而形成合格产品盘片,装有晶圆的盘片上剩余有不合格的晶圆产品后,变成废品盘片;
17、步骤(7)、分选完成后,晶圆盘片缓冲机构将废品盘片进行移动,此时盘片机械手的其中一个夹爪夹起装有晶圆的盘片并移动至废品盘片将要竖起的位置上方并等待,废品盘片在晶圆盘片缓冲机构的作用下竖起,盘片机械手的另一个夹爪将废品盘片夹起,其中一个夹爪将装有晶圆的盘片放置在空置的晶圆盘片缓冲机构中,晶圆盘片缓冲机构中复位;然后废品盘片被放置在储盘盒内,并进行位置传感标记,标记的信号会被装卸载系统接收;
18、步骤(8)、产品盘片缓冲装置将合格产品盘片移动至指定位置并将合格产品盘片竖起,盘片机械手移动至储盘装置另一侧,并使用其中一个夹爪夹起一个普通空盘片;
19、盘片机械手移动至合格产品盘片上方,通过另一个夹爪夹起合格产品盘片,其中一个夹爪将需要替换的普通空盘片放置在产品盘片缓冲装置上,产品盘片缓冲装置复位,晶片分选工作继续;
20、然后另一个夹爪将合格产品盘片放置在储盘盒内,并进行位置传感标记,标记的信号会被装卸载系统接收;
21、步骤(9)、若试验晶片不符合分选要求,调整相对位置,并找出不符合的要素进行调增,重复步骤(4)-(8);若试验晶片不符合分选要求,进行步骤(10);
22、步骤(10)、装载需要分选的正常晶片盘,重复步骤(5)-(8),直至所有储盘盒内的盘片位置被标记完成,直接拔出储盘盒进行新的物料的更换。
23、优选的,所述晶圆盘片缓冲机构包括晶圆底座和设置在晶圆底座上端的晶圆盘片装卸载装置,晶圆底座连接在上垫板的上端;
24、晶圆盘片装卸载装置包括晶圆盘片承载机构、晶圆盘片分选固定机构和晶圆盘片夹取机构,圆盘片承载机构设置在晶圆盘片分选固定机构的前侧,晶圆盘片夹取机构包括第一夹取支撑机构和滑动连接在第一夹取支撑机构上的第一滑动夹板组件,第一夹取支撑机构位于晶圆盘片承载机构、晶圆盘片分选固定机构的一侧;
25、所述晶圆盘片承载机构通过第一旋转调节机构连接在晶圆底座的前部上端,晶圆盘片分选固定机构通过第一位置调节机构连接在晶圆底座的后部上端。
26、优选的,所述产品盘片缓冲装置包括产品底座、设置在产品底座上端的第二位置调节机构、设置在第二位置调节机构上的产品顶座,产品顶座上设置有第二旋转调节机构,第二旋转调节机构上设置有产品圆片承载机构。
27、优选的,所述储盘盒包括储盘底板和连接在储盘底板上端的重力传感垫板、储盘支撑外框,重力传感垫板设置在储盘支撑外框内侧的储盘底板上,重力传感垫板上方的储盘支撑外框内设置有盘体分隔内板,盘体分隔内板中开设有盘体安放凹槽。
28、优选的,所述盘体安放凹槽中放置有盘片骨架,盘片骨架包括圆形盘撑架和连接在圆形盘撑架末端的盘片夹取块,盘片夹取块上开设用于第一支撑夹板和第二支撑夹板进行夹持的夹取槽空。
29、优选的,所述第一机械手气缸组件和第二机械手气缸组件均为升降导向组件,所述升降导向组件包括升降气缸件和导向杆筒件,升降气缸件包括第一气缸筒和连接在第一气缸筒内的第一气缸杆,导向杆筒件包括第一导向筒和连接在第一导向筒内的第一导向杆,第一气缸杆的下端和第一导向杆下端均与夹持支座连接;第一气缸筒和第一导向筒相互平行设置,并且第一气缸筒和第一导向筒均穿过机械手插接座。
30、优选的,所述机械手辅撑框架包括辅撑左支板和辅撑右支板,辅撑左支板和辅撑右支板均呈倒l形板状,辅撑左支板和辅撑右支板均通过第一结构加强连接板与机械手插接座连接;
31、所述辅撑左支板和辅撑右支板的内侧均设置有辅助定位块,辅助定位块上插接有盘片辅助组件;
32、盘片辅助组件包括两个辅助撑架和连接在辅助撑架内的复制凹槽,辅撑左支板、辅撑右支板上均设置两个盘片辅助组件。
33、优选的,所述第一支撑夹板和第二支撑夹板均为异形支板;
34、异形支板包括长方形支板体、连接在长方形支板体下端的三角形支板体、连接在三角形支板体下端的弧形夹持板体,弧形夹持板体的端部插接在三角形板体的下部内后通过螺丝固定,弧形夹持板体上连接有阻塞传感器;
35、长方形支板体和三角形支板体为一体成型的金属板,三角形支板体的上端的厚度大于长方形支板体的厚度;弧形夹持板体为金属板,弧形夹持板体的外端套接有夹持橡胶套。
36、本发明的有益效果是:
37、上述系统中,机械手的空间移动采用交流伺服电机驱动,同步带轮传动,沿直线导轨水平运动。机械手上夹爪上设计有凸指(异形支板的弧形板部结构),机械手上的夹爪抓取盘片时,凸指卡入盘片的凹槽里,确保抓取操作可靠。本发明中的机械手进行抓取盘片时,夹爪的记性夹取或释放盘片时操作采用了气动系统结构(气压电磁阀和导向轴套件),气压电磁阀为微型的驱动气缸(选择高精度的微型气缸,微型气缸上设置有伸缩距离的传感器),控制抓爪抓取或释放。机械手的弧形端部上安装有阻塞传感器,当抓爪渗入进盘片抓取位置时,阻塞传感器接受到位置信号,控制机械手抓取盘片。上述装配式半导体芯片盘片装卸载方法中,设置有新型装配式结构的盘片支撑机构,整体上可更方便装配和拆卸。晶圆盘片缓冲机构、产品盘片缓冲装置可分别安装加工,安装完成后固定在盘片支撑机构上,便于整体结构的装配,提高了整个设备的加工效率。
- 还没有人留言评论。精彩留言会获得点赞!