一种平面度间隙自适应调整方法、装置、设备和介质与流程
本技术涉及人工智能,特别是涉及一种平面度间隙自适应调整方法、装置、设备和介质。
背景技术:
1、在电子制造、半导体生产以及精密机械加工等行业,对于上基板和下基板之间的平面度调整和间隙(gap)值的控制显得尤为重要。在半导体生产中,保持精确的平面度和gap值是确保芯片组件连接可靠性和性能稳定性的关键。类似地,在精密机械加工领域,如航空航天工业和制造业,确保加工部件之间的精确对准和gap值符合规格要求是保证产品精密度和质量的重要步骤。
2、然而,传统的人工调整和测量方法存在精度低和效率低下的问题,难以满足现代制造业对高精度和高效率的要求。相关技术中设置有调整机构,用于调节基板的姿态,其中,调整机构包括用于承载基板的基板安装面和多个用于调节基板姿态的基板调节件,并且基板调节件与基板安装面相连接,能够沿轨道滑动以调节基板姿态。但是,此种调整机构目前只能采用半自动的调整方法,虽能够满足自动测量的要求,但仍没有实现测量和调整的全自动化,使得调整结果的精准度不足。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够自动实现上下基板的姿态调节,提高调整结果的精准度的平面度间隙自适应调整方法、装置、计算机设备和计算机可读存储介质。
2、第一方面,本技术提供了一种平面度间隙自适应调整方法,包括:
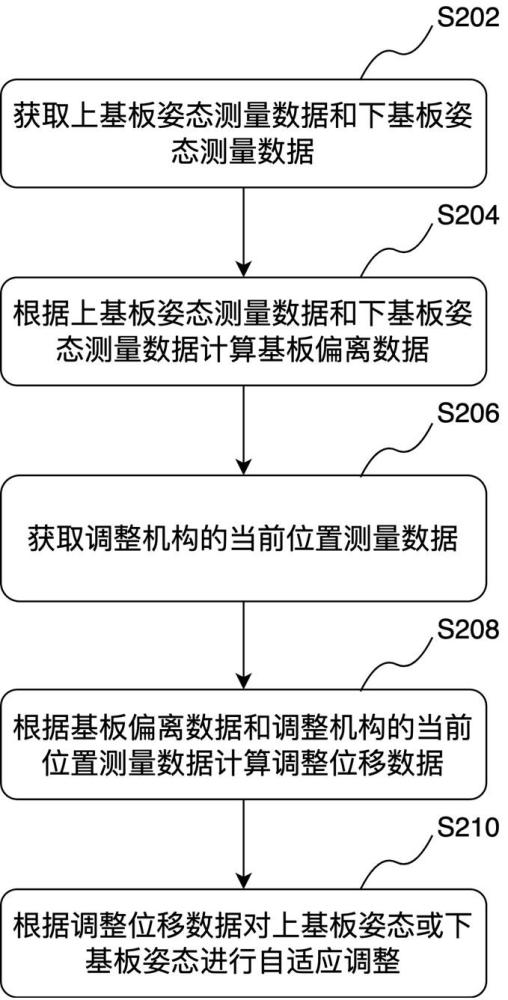
3、获取上基板姿态测量数据和下基板姿态测量数据,其中,所述上基板姿态测量数据用于表征上基板的平面度,所述下基板姿态测量数据用于表征下基板的平面度;
4、根据所述上基板姿态测量数据和所述下基板姿态测量数据计算基板偏离数据;
5、获取调整机构的当前位置测量数据;
6、根据所述基板偏离数据和所述调整机构的当前位置测量数据计算调整位移数据;
7、根据所述调整位移数据对上基板姿态或下基板姿态进行自适应调整。
8、在其中一个实施例中,所述获取上基板姿态测量数据和下基板姿态测量数据包括:
9、以预设参考点作为坐标原点,并在水平面上选取x轴和y轴,建立参考坐标系;
10、获取多个测量点的位置坐标,其中,所述测量点包括上基板测量点和下基板测量点;
11、根据所述测量点的位置坐标计算上基板姿态测量数据和下基板姿态测量数据,其中,所述上基板姿态测量数据包括上基板偏离角度和上基板偏离距离,所述下基板姿态测量数据包括下基板偏离角度和下基板偏离距离。
12、在其中一个实施例中,多个所述上基板测量点在同一个上基板测量面上,多个所述下基板测量点在同一个下基板测量面上;所述根据所述测量点的位置坐标计算上基板姿态测量数据和下基板姿态测量数据包括:
13、根据所述上基板测量点的位置坐标计算得到所述上基板测量面以所述x轴为旋转轴的x轴偏转角度,和所述上基板测量面以所述y轴为旋转轴的y轴偏转角度;
14、根据所述下基板测量点的位置坐标计算得到所述下基板测量面以所述x轴为旋转轴的x轴偏转角度,和所述下基板测量面以所述y轴为旋转轴的y轴偏转角度;
15、根据所述上基板测量面与z轴的交点和所述下基板测量面与z轴的交点确定上基板偏离距离和下基板偏离距离。
16、在其中一个实施例中,所述调整机构包括多个调整点,所述调整点用于沿所述z轴移动,所述当前位置测量数据包括相邻调整点间的距离和相邻调整点间的连线与所述坐标原点的距离。
17、在其中一个实施例中,所述根据所述上基板姿态测量数据和所述下基板姿态测量数据计算基板偏离数据包括:
18、根据所述上基板姿态测量数据计算上基板平面度;
19、判断所述上基板平面度是否超出第一预设阈值;
20、根据所述下基板姿态测量数据计算下基板平面度;
21、判断所述下基板平面度是否超出第二预设阈值;
22、在所述上基板平面度和所述下基板平面度均未超出预设阈值的情况下,计算基板偏离数据。
23、在其中一个实施例中,所述根据所述上基板姿态测量数据和所述下基板姿态测量数据计算基板偏离数据和所述获取调整机构的当前位置测量数据之间,还包括:
24、判断所述基板偏离数据是否超出第三预设阈值;
25、在所述基板偏离数据未超出所述第三预设阈值的情况下,获取调整机构的当前位置测量数据。
26、在其中一个实施例中,所述方法包括:
27、在判断所述上基板平面度超出第一预设阈值的情况下,重新计算所述上基板平面度,并累计当前计算次数;
28、在所述当前计算次数超过预设数值的情况下,输出上基板下料信息;
29、相应地,
30、在判断所述下基板平面度超出第二预设阈值的情况下,重新计算所述下基板平面度,并累计当前计算次数;
31、在所述当前计算次数超过预设数值的情况下,输出下基板下料信息。
32、第二方面,本技术还提供了一种平面度间隙自适应调整装置,包括:
33、原始数据测量模块,用于获取上基板姿态测量数据和下基板姿态测量数据,其中,所述上基板姿态测量数据用于表征上基板的平面度,所述下基板姿态测量数据用于表征下基板的平面度;
34、偏离数据计算模块,用于根据所述上基板姿态测量数据和所述下基板姿态测量数据计算基板偏离数据;
35、调整位置获取模块,用于获取调整机构的当前位置测量数据;
36、调整数据计算模块,用于根据所述基板偏离数据和所述调整机构的当前位置测量数据计算调整位移数据;
37、自适应调整模块,用于根据所述调整位移数据对上基板姿态或下基板姿态进行自适应调整。
38、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
39、获取上基板姿态测量数据和下基板姿态测量数据,其中,所述上基板姿态测量数据用于表征上基板的平面度,所述下基板姿态测量数据用于表征下基板的平面度;
40、根据所述上基板姿态测量数据和所述下基板姿态测量数据计算基板偏离数据;
41、获取调整机构的当前位置测量数据;
42、根据所述基板偏离数据和所述调整机构的当前位置测量数据计算调整位移数据;
43、根据所述调整位移数据对上基板姿态或下基板姿态进行自适应调整。
44、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
45、获取上基板姿态测量数据和下基板姿态测量数据,其中,所述上基板姿态测量数据用于表征上基板的平面度,所述下基板姿态测量数据用于表征下基板的平面度;
46、根据所述上基板姿态测量数据和所述下基板姿态测量数据计算基板偏离数据;
47、获取调整机构的当前位置测量数据;
48、根据所述基板偏离数据和所述调整机构的当前位置测量数据计算调整位移数据;
49、根据所述调整位移数据对上基板姿态或下基板姿态进行自适应调整。
50、上述平面度间隙自适应调整方法、装置、计算机设备和存储介质,通过获取上基板姿态测量数据和下基板姿态测量数据,能够计算出上基板的平面度和下基板的平面度,进而计算出上下基板的偏离数据,也即获取到当前需要调整的上下基板姿态情况。接下来,通过获取调整机构的当前位置测量数据,能够得到当前调整机构上多个调节件的当前位置,由于上基板姿态测量数据、下基板姿态测量数据和调整机构的当前位置测量数据均为同一坐标系下测量的数据,因此,再根据多个调节件当前的位置与上述过程中计算出来的偏离数据,即可计算出用于表征多个调节件需要移动或调整的调整位移数据,调整机构即可根据调整位移数据对上基板姿态或下基板姿态进行自适应调整,实现调整自动化,从而能够快速、精确地检测和调整上下基板的平面度和gap值,提高调整的精准度。
- 还没有人留言评论。精彩留言会获得点赞!